
L08 Design For Test Ability
L08 Design For Test Ability
You might also like
- JTAG TutorialDocument6 pagesJTAG Tutorialmrunal1729No ratings yet
- ATPG LAB3dDocument2 pagesATPG LAB3dMani KandanNo ratings yet
- ATPG AdvancedDocument38 pagesATPG Advancedrajat guptaNo ratings yet
- Siemens SW Tessent IJTAG FS 82810 C3Document3 pagesSiemens SW Tessent IJTAG FS 82810 C3rajitkarmakarNo ratings yet
- Dileep Kumar Narla DFTDocument3 pagesDileep Kumar Narla DFTshubhadNo ratings yet
- How To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFDocument10 pagesHow To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFAnjali TailorNo ratings yet
- Welcome To IJTAG - A No-Risk Path To IEEE P1687 - Tech Design Forum TechniquesDocument6 pagesWelcome To IJTAG - A No-Risk Path To IEEE P1687 - Tech Design Forum TechniquesrajitkarmakarNo ratings yet
- BIST ControllerDocument3 pagesBIST ControllerBbsn EmbeddedNo ratings yet
- Edt GDDocument364 pagesEdt GDAre VijayNo ratings yet
- Is Hold Always Checked On The Same Edge - PDFDocument3 pagesIs Hold Always Checked On The Same Edge - PDFaanbalanNo ratings yet
- BSDL-Boundary Scan PDFDocument17 pagesBSDL-Boundary Scan PDFChinmayNo ratings yet
- DFT Scan Insertion: VLSI Testing and Design For TestabilityDocument19 pagesDFT Scan Insertion: VLSI Testing and Design For TestabilityHuzur AhmedNo ratings yet
- Week 3Document34 pagesWeek 3apoorvaNo ratings yet
- DFT - Design For Testability - Verified With Hardware EmulationDocument3 pagesDFT - Design For Testability - Verified With Hardware EmulationRod SbNo ratings yet
- Boundary Scan: Joint Test Action Group (Jtag)Document10 pagesBoundary Scan: Joint Test Action Group (Jtag)anuNo ratings yet
- Timing Behavior FSM Partitioning State Machine SignalingDocument47 pagesTiming Behavior FSM Partitioning State Machine SignalingsenthilkumarNo ratings yet
- Time Borrow LatchDocument4 pagesTime Borrow LatchSachin TanejaNo ratings yet
- Loc, Los and Loes At-Speed Testing Methodologies For Automatic Test Pattern Generation Using Transition Delay Fault ModelDocument5 pagesLoc, Los and Loes At-Speed Testing Methodologies For Automatic Test Pattern Generation Using Transition Delay Fault ModelTarun gNo ratings yet
- DFTDocument13 pagesDFTvishalbharate123No ratings yet
- Jtag - AN IEEE 1149.1 STDDocument42 pagesJtag - AN IEEE 1149.1 STDkanchanstiwariNo ratings yet
- At Speed TestingDocument7 pagesAt Speed TestingshobitNo ratings yet
- The Languages of IJTAG: ICL, PDL IJTAG Architectural ComponentsDocument1 pageThe Languages of IJTAG: ICL, PDL IJTAG Architectural Componentsthao nguyen leNo ratings yet
- Tmax RulesDocument395 pagesTmax RulesVENKATRAMANNo ratings yet
- IJTAG B Ravi Kishore 2017HT80522Document10 pagesIJTAG B Ravi Kishore 2017HT80522RaviKishoreBonalaNo ratings yet
- On The Detectability of Scan Chain Internal Faults - An Industrial Case StudyDocument6 pagesOn The Detectability of Scan Chain Internal Faults - An Industrial Case StudynagarjunaNo ratings yet
- Design For Test by Alfred L CrouchDocument117 pagesDesign For Test by Alfred L CrouchEdwin Singh100% (1)
- Tetramax DF DsDocument4 pagesTetramax DF DsBrijesh S DNo ratings yet
- Design For Test - DFT Q & A - Part 1Document3 pagesDesign For Test - DFT Q & A - Part 1Veeranjaneyulu Dhikonda0% (1)
- Lockup Elements - The Timing PerspectiveDocument5 pagesLockup Elements - The Timing PerspectiveeashwarNo ratings yet
- Sns College of Technology: Department of Electronics & Communication EngineeringDocument24 pagesSns College of Technology: Department of Electronics & Communication EngineeringswamynathanNo ratings yet
- Table of Contents: The IDDQ MysteryDocument9 pagesTable of Contents: The IDDQ MysteryShweta SinhaNo ratings yet
- FifoDocument5 pagesFifoVenky KoolchipNo ratings yet
- Scan Training Class 4 - EDT Scan Compression, STF, and Border SealingDocument29 pagesScan Training Class 4 - EDT Scan Compression, STF, and Border SealingChandraNo ratings yet
- Logic Synthesis 5 FSM and Retiming PDFDocument6 pagesLogic Synthesis 5 FSM and Retiming PDFAre VijayNo ratings yet
- Assignment 1Document3 pagesAssignment 1dheeraj.d JainNo ratings yet
- Implementation of PODEM Algorithm: OutlineDocument2 pagesImplementation of PODEM Algorithm: OutlineNivin PaulNo ratings yet
- VerilogDocument44 pagesVerilogTharun kondaNo ratings yet
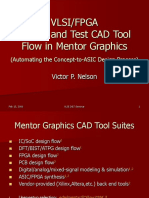
- Vlsi/Fpga Design and Test CAD Tool Flow in Mentor Graphics: Victor P. NelsonDocument44 pagesVlsi/Fpga Design and Test CAD Tool Flow in Mentor Graphics: Victor P. NelsonAvinash B RajNo ratings yet
- At-Speed Transition Fault Testing With Low Speed Scan EnableDocument6 pagesAt-Speed Transition Fault Testing With Low Speed Scan EnableSiva SreeramdasNo ratings yet
- VLSI Concepts - VLSI BASIC ImportantDocument6 pagesVLSI Concepts - VLSI BASIC ImportantIlaiyaveni IyanduraiNo ratings yet
- Cadence CommandDocument7 pagesCadence CommandVENKATRAMANNo ratings yet
- Basic UNIX Commands - 1Document4 pagesBasic UNIX Commands - 1Naganithesh GhattamaneniNo ratings yet
- Vcs /vcsi™ User Guide: Version F-2011.12-Sp1 May 2012Document1,322 pagesVcs /vcsi™ User Guide: Version F-2011.12-Sp1 May 2012paras_gangwal9757No ratings yet
- Question / Answer: 1. What Is Synthesis Process ?Document6 pagesQuestion / Answer: 1. What Is Synthesis Process ?Meet ZankatNo ratings yet
- Tessent Testkompress & Adv. Topics: 2016 Mentor Graphics CorporationDocument14 pagesTessent Testkompress & Adv. Topics: 2016 Mentor Graphics CorporationVeadeshNo ratings yet
- Scan Insertion Lab ObservationsDocument3 pagesScan Insertion Lab ObservationssenthilkumarNo ratings yet
- NTF17 s6.2Document40 pagesNTF17 s6.2rajitkarmakarNo ratings yet
- DRC OverviewDocument1 pageDRC OverviewIlaiyaveni IyanduraiNo ratings yet
- C C C C CC C: C C C CDocument4 pagesC C C C CC C: C C C CRishav HarshNo ratings yet
- Embedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003Document10 pagesEmbedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003pavithrNo ratings yet
- Streaming Scan NetworkDocument10 pagesStreaming Scan NetworkDeepak TiwariNo ratings yet
- LBIST - A Technique For Infield SafetyDocument4 pagesLBIST - A Technique For Infield Safetyrahul1990bhatiaNo ratings yet
- What Are The Differences Between SIMULATION and SYNTHESISDocument12 pagesWhat Are The Differences Between SIMULATION and SYNTHESISiyanduraiNo ratings yet
- Rom BistDocument51 pagesRom BistMuralikrishna UttaradiNo ratings yet
- Case12d ObservationDocument3 pagesCase12d ObservationsenthilkumarNo ratings yet
- CDC Signoff Using SDCDocument36 pagesCDC Signoff Using SDCworkat60474No ratings yet
- Low-Power Design and Test, Lecture 8Document35 pagesLow-Power Design and Test, Lecture 8Mani KandanNo ratings yet
- Design For TestabilityDocument43 pagesDesign For Testabilitysunnymeharwal100% (1)
- Lecture 10Document24 pagesLecture 10sarthak kothariNo ratings yet
- Sae As 4099C-2007Document3 pagesSae As 4099C-2007KeinaraNo ratings yet
- Preliminary Tech. Doc. OG120C TG 5Document17 pagesPreliminary Tech. Doc. OG120C TG 5Михаил Гуляев100% (2)
- Fretting FatigueDocument6 pagesFretting FatigueKaradiasNo ratings yet
- H14YS-5A-2301-Reminder - 110423Document3 pagesH14YS-5A-2301-Reminder - 110423BẢO Nhi LêNo ratings yet
- Dragonfly Wind TurbineDocument3 pagesDragonfly Wind Turbinepascusergiuoctavian4504No ratings yet
- Technical Data Sheet For Hilti HIT HY 200Document39 pagesTechnical Data Sheet For Hilti HIT HY 200ValeriuNo ratings yet
- Steam Silencer DesignDocument3 pagesSteam Silencer DesignDaan Brenis100% (1)
- ELEC9713-11 Lec07 EarthingDocument54 pagesELEC9713-11 Lec07 Earthinggolu100% (1)
- Chapter 01Document23 pagesChapter 01Sherin M AnsariNo ratings yet
- Energization and Tie in Plan: ObjectiveDocument5 pagesEnergization and Tie in Plan: ObjectiveNajmul QamarNo ratings yet
- What Is A Carbon Footprint?Document5 pagesWhat Is A Carbon Footprint?Mike Paul0% (1)
- Shear Wall Moment-Curvature RelationshipDocument16 pagesShear Wall Moment-Curvature RelationshipEric CastilloNo ratings yet
- European Patent Application: Washing Machine Apparatus and MethodDocument15 pagesEuropean Patent Application: Washing Machine Apparatus and MethodHitesh PanigrahiNo ratings yet
- Thakur Institute of Aviation TechnologyDocument3 pagesThakur Institute of Aviation TechnologyAshwini ChaurasiaNo ratings yet
- A 7 ZD 09Document1 pageA 7 ZD 09Fabián MedinaNo ratings yet
- How To Bypass Blocked Internet Connection in Universiti Teknologi PetronasDocument5 pagesHow To Bypass Blocked Internet Connection in Universiti Teknologi PetronasIzzudin HusseinNo ratings yet
- PDMS Commands Design PDFDocument19 pagesPDMS Commands Design PDFerlifieNo ratings yet
- Deflection of Truss by Unit Load MethodDocument2 pagesDeflection of Truss by Unit Load Methodspudweb_tech100% (1)
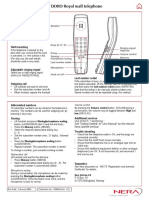
- Using DORO Royal Wall Telephone: ConnectionDocument1 pageUsing DORO Royal Wall Telephone: ConnectionBhavin DoshiNo ratings yet
- Arc Flash Boundaries & Design FinalDocument60 pagesArc Flash Boundaries & Design Finaljeanpaul CAYTANNo ratings yet
- Iem Course FileDocument7 pagesIem Course FilevamsibuNo ratings yet
- Operation Research MBADocument21 pagesOperation Research MBAjio teamNo ratings yet
- Sylvania Lc370ss9 LCD TV SMDocument61 pagesSylvania Lc370ss9 LCD TV SMstechs02100% (1)
- ATTACHMENT 1-TECHNICAL BID EVALUATION FOR VALVES ATTACHEMENT Camtech Rev 1Document4 pagesATTACHMENT 1-TECHNICAL BID EVALUATION FOR VALVES ATTACHEMENT Camtech Rev 1eko123No ratings yet
- PHP TutorialDocument2 pagesPHP TutorialanbakalaNo ratings yet
- Shield - Bright 2209 FCAW (!)Document2 pagesShield - Bright 2209 FCAW (!)rajNo ratings yet
- CFXDocument35 pagesCFXColezea Dragos-NicolaeNo ratings yet
- Carbohydrate Polymers: Sara R. Labafzadeh, Kashmira Vyavaharkar, Jari S. Kavakka, Alistair W.T. King, Ilkka KilpeläinenDocument7 pagesCarbohydrate Polymers: Sara R. Labafzadeh, Kashmira Vyavaharkar, Jari S. Kavakka, Alistair W.T. King, Ilkka KilpeläinenAbiCorreaNo ratings yet
- Instruction Sheet IST-053-1 Large Pressure Relief Device Operating and Testing Instructions BDocument2 pagesInstruction Sheet IST-053-1 Large Pressure Relief Device Operating and Testing Instructions BAlaa ZoraNo ratings yet
- Basics of Gas Turbine (PGT25)Document74 pagesBasics of Gas Turbine (PGT25)PD100% (1)
























































































Download as pdf or txt
You might also like
- JTAG TutorialDocument6 pagesJTAG Tutorialmrunal1729No ratings yet
- ATPG LAB3dDocument2 pagesATPG LAB3dMani KandanNo ratings yet
- ATPG AdvancedDocument38 pagesATPG Advancedrajat guptaNo ratings yet
- Siemens SW Tessent IJTAG FS 82810 C3Document3 pagesSiemens SW Tessent IJTAG FS 82810 C3rajitkarmakarNo ratings yet
- Dileep Kumar Narla DFTDocument3 pagesDileep Kumar Narla DFTshubhadNo ratings yet
- How To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFDocument10 pagesHow To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFAnjali TailorNo ratings yet
- Welcome To IJTAG - A No-Risk Path To IEEE P1687 - Tech Design Forum TechniquesDocument6 pagesWelcome To IJTAG - A No-Risk Path To IEEE P1687 - Tech Design Forum TechniquesrajitkarmakarNo ratings yet
- BIST ControllerDocument3 pagesBIST ControllerBbsn EmbeddedNo ratings yet
- Edt GDDocument364 pagesEdt GDAre VijayNo ratings yet
- Is Hold Always Checked On The Same Edge - PDFDocument3 pagesIs Hold Always Checked On The Same Edge - PDFaanbalanNo ratings yet
- BSDL-Boundary Scan PDFDocument17 pagesBSDL-Boundary Scan PDFChinmayNo ratings yet
- DFT Scan Insertion: VLSI Testing and Design For TestabilityDocument19 pagesDFT Scan Insertion: VLSI Testing and Design For TestabilityHuzur AhmedNo ratings yet
- Week 3Document34 pagesWeek 3apoorvaNo ratings yet
- DFT - Design For Testability - Verified With Hardware EmulationDocument3 pagesDFT - Design For Testability - Verified With Hardware EmulationRod SbNo ratings yet
- Boundary Scan: Joint Test Action Group (Jtag)Document10 pagesBoundary Scan: Joint Test Action Group (Jtag)anuNo ratings yet
- Timing Behavior FSM Partitioning State Machine SignalingDocument47 pagesTiming Behavior FSM Partitioning State Machine SignalingsenthilkumarNo ratings yet
- Time Borrow LatchDocument4 pagesTime Borrow LatchSachin TanejaNo ratings yet
- Loc, Los and Loes At-Speed Testing Methodologies For Automatic Test Pattern Generation Using Transition Delay Fault ModelDocument5 pagesLoc, Los and Loes At-Speed Testing Methodologies For Automatic Test Pattern Generation Using Transition Delay Fault ModelTarun gNo ratings yet
- DFTDocument13 pagesDFTvishalbharate123No ratings yet
- Jtag - AN IEEE 1149.1 STDDocument42 pagesJtag - AN IEEE 1149.1 STDkanchanstiwariNo ratings yet
- At Speed TestingDocument7 pagesAt Speed TestingshobitNo ratings yet
- The Languages of IJTAG: ICL, PDL IJTAG Architectural ComponentsDocument1 pageThe Languages of IJTAG: ICL, PDL IJTAG Architectural Componentsthao nguyen leNo ratings yet
- Tmax RulesDocument395 pagesTmax RulesVENKATRAMANNo ratings yet
- IJTAG B Ravi Kishore 2017HT80522Document10 pagesIJTAG B Ravi Kishore 2017HT80522RaviKishoreBonalaNo ratings yet
- On The Detectability of Scan Chain Internal Faults - An Industrial Case StudyDocument6 pagesOn The Detectability of Scan Chain Internal Faults - An Industrial Case StudynagarjunaNo ratings yet
- Design For Test by Alfred L CrouchDocument117 pagesDesign For Test by Alfred L CrouchEdwin Singh100% (1)
- Tetramax DF DsDocument4 pagesTetramax DF DsBrijesh S DNo ratings yet
- Design For Test - DFT Q & A - Part 1Document3 pagesDesign For Test - DFT Q & A - Part 1Veeranjaneyulu Dhikonda0% (1)
- Lockup Elements - The Timing PerspectiveDocument5 pagesLockup Elements - The Timing PerspectiveeashwarNo ratings yet
- Sns College of Technology: Department of Electronics & Communication EngineeringDocument24 pagesSns College of Technology: Department of Electronics & Communication EngineeringswamynathanNo ratings yet
- Table of Contents: The IDDQ MysteryDocument9 pagesTable of Contents: The IDDQ MysteryShweta SinhaNo ratings yet
- FifoDocument5 pagesFifoVenky KoolchipNo ratings yet
- Scan Training Class 4 - EDT Scan Compression, STF, and Border SealingDocument29 pagesScan Training Class 4 - EDT Scan Compression, STF, and Border SealingChandraNo ratings yet
- Logic Synthesis 5 FSM and Retiming PDFDocument6 pagesLogic Synthesis 5 FSM and Retiming PDFAre VijayNo ratings yet
- Assignment 1Document3 pagesAssignment 1dheeraj.d JainNo ratings yet
- Implementation of PODEM Algorithm: OutlineDocument2 pagesImplementation of PODEM Algorithm: OutlineNivin PaulNo ratings yet
- VerilogDocument44 pagesVerilogTharun kondaNo ratings yet
- Vlsi/Fpga Design and Test CAD Tool Flow in Mentor Graphics: Victor P. NelsonDocument44 pagesVlsi/Fpga Design and Test CAD Tool Flow in Mentor Graphics: Victor P. NelsonAvinash B RajNo ratings yet
- At-Speed Transition Fault Testing With Low Speed Scan EnableDocument6 pagesAt-Speed Transition Fault Testing With Low Speed Scan EnableSiva SreeramdasNo ratings yet
- VLSI Concepts - VLSI BASIC ImportantDocument6 pagesVLSI Concepts - VLSI BASIC ImportantIlaiyaveni IyanduraiNo ratings yet
- Cadence CommandDocument7 pagesCadence CommandVENKATRAMANNo ratings yet
- Basic UNIX Commands - 1Document4 pagesBasic UNIX Commands - 1Naganithesh GhattamaneniNo ratings yet
- Vcs /vcsi™ User Guide: Version F-2011.12-Sp1 May 2012Document1,322 pagesVcs /vcsi™ User Guide: Version F-2011.12-Sp1 May 2012paras_gangwal9757No ratings yet
- Question / Answer: 1. What Is Synthesis Process ?Document6 pagesQuestion / Answer: 1. What Is Synthesis Process ?Meet ZankatNo ratings yet
- Tessent Testkompress & Adv. Topics: 2016 Mentor Graphics CorporationDocument14 pagesTessent Testkompress & Adv. Topics: 2016 Mentor Graphics CorporationVeadeshNo ratings yet
- Scan Insertion Lab ObservationsDocument3 pagesScan Insertion Lab ObservationssenthilkumarNo ratings yet
- NTF17 s6.2Document40 pagesNTF17 s6.2rajitkarmakarNo ratings yet
- DRC OverviewDocument1 pageDRC OverviewIlaiyaveni IyanduraiNo ratings yet
- C C C C CC C: C C C CDocument4 pagesC C C C CC C: C C C CRishav HarshNo ratings yet
- Embedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003Document10 pagesEmbedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003pavithrNo ratings yet
- Streaming Scan NetworkDocument10 pagesStreaming Scan NetworkDeepak TiwariNo ratings yet
- LBIST - A Technique For Infield SafetyDocument4 pagesLBIST - A Technique For Infield Safetyrahul1990bhatiaNo ratings yet
- What Are The Differences Between SIMULATION and SYNTHESISDocument12 pagesWhat Are The Differences Between SIMULATION and SYNTHESISiyanduraiNo ratings yet
- Rom BistDocument51 pagesRom BistMuralikrishna UttaradiNo ratings yet
- Case12d ObservationDocument3 pagesCase12d ObservationsenthilkumarNo ratings yet
- CDC Signoff Using SDCDocument36 pagesCDC Signoff Using SDCworkat60474No ratings yet
- Low-Power Design and Test, Lecture 8Document35 pagesLow-Power Design and Test, Lecture 8Mani KandanNo ratings yet
- Design For TestabilityDocument43 pagesDesign For Testabilitysunnymeharwal100% (1)
- Lecture 10Document24 pagesLecture 10sarthak kothariNo ratings yet
- Sae As 4099C-2007Document3 pagesSae As 4099C-2007KeinaraNo ratings yet
- Preliminary Tech. Doc. OG120C TG 5Document17 pagesPreliminary Tech. Doc. OG120C TG 5Михаил Гуляев100% (2)
- Fretting FatigueDocument6 pagesFretting FatigueKaradiasNo ratings yet
- H14YS-5A-2301-Reminder - 110423Document3 pagesH14YS-5A-2301-Reminder - 110423BẢO Nhi LêNo ratings yet
- Dragonfly Wind TurbineDocument3 pagesDragonfly Wind Turbinepascusergiuoctavian4504No ratings yet
- Technical Data Sheet For Hilti HIT HY 200Document39 pagesTechnical Data Sheet For Hilti HIT HY 200ValeriuNo ratings yet
- Steam Silencer DesignDocument3 pagesSteam Silencer DesignDaan Brenis100% (1)
- ELEC9713-11 Lec07 EarthingDocument54 pagesELEC9713-11 Lec07 Earthinggolu100% (1)
- Chapter 01Document23 pagesChapter 01Sherin M AnsariNo ratings yet
- Energization and Tie in Plan: ObjectiveDocument5 pagesEnergization and Tie in Plan: ObjectiveNajmul QamarNo ratings yet
- What Is A Carbon Footprint?Document5 pagesWhat Is A Carbon Footprint?Mike Paul0% (1)
- Shear Wall Moment-Curvature RelationshipDocument16 pagesShear Wall Moment-Curvature RelationshipEric CastilloNo ratings yet
- European Patent Application: Washing Machine Apparatus and MethodDocument15 pagesEuropean Patent Application: Washing Machine Apparatus and MethodHitesh PanigrahiNo ratings yet
- Thakur Institute of Aviation TechnologyDocument3 pagesThakur Institute of Aviation TechnologyAshwini ChaurasiaNo ratings yet
- A 7 ZD 09Document1 pageA 7 ZD 09Fabián MedinaNo ratings yet
- How To Bypass Blocked Internet Connection in Universiti Teknologi PetronasDocument5 pagesHow To Bypass Blocked Internet Connection in Universiti Teknologi PetronasIzzudin HusseinNo ratings yet
- PDMS Commands Design PDFDocument19 pagesPDMS Commands Design PDFerlifieNo ratings yet
- Deflection of Truss by Unit Load MethodDocument2 pagesDeflection of Truss by Unit Load Methodspudweb_tech100% (1)
- Using DORO Royal Wall Telephone: ConnectionDocument1 pageUsing DORO Royal Wall Telephone: ConnectionBhavin DoshiNo ratings yet
- Arc Flash Boundaries & Design FinalDocument60 pagesArc Flash Boundaries & Design Finaljeanpaul CAYTANNo ratings yet
- Iem Course FileDocument7 pagesIem Course FilevamsibuNo ratings yet
- Operation Research MBADocument21 pagesOperation Research MBAjio teamNo ratings yet
- Sylvania Lc370ss9 LCD TV SMDocument61 pagesSylvania Lc370ss9 LCD TV SMstechs02100% (1)
- ATTACHMENT 1-TECHNICAL BID EVALUATION FOR VALVES ATTACHEMENT Camtech Rev 1Document4 pagesATTACHMENT 1-TECHNICAL BID EVALUATION FOR VALVES ATTACHEMENT Camtech Rev 1eko123No ratings yet
- PHP TutorialDocument2 pagesPHP TutorialanbakalaNo ratings yet
- Shield - Bright 2209 FCAW (!)Document2 pagesShield - Bright 2209 FCAW (!)rajNo ratings yet
- CFXDocument35 pagesCFXColezea Dragos-NicolaeNo ratings yet
- Carbohydrate Polymers: Sara R. Labafzadeh, Kashmira Vyavaharkar, Jari S. Kavakka, Alistair W.T. King, Ilkka KilpeläinenDocument7 pagesCarbohydrate Polymers: Sara R. Labafzadeh, Kashmira Vyavaharkar, Jari S. Kavakka, Alistair W.T. King, Ilkka KilpeläinenAbiCorreaNo ratings yet
- Instruction Sheet IST-053-1 Large Pressure Relief Device Operating and Testing Instructions BDocument2 pagesInstruction Sheet IST-053-1 Large Pressure Relief Device Operating and Testing Instructions BAlaa ZoraNo ratings yet
- Basics of Gas Turbine (PGT25)Document74 pagesBasics of Gas Turbine (PGT25)PD100% (1)