
Crypto Project
Crypto Project
You might also like
- Cybr371 Final AssignmentDocument7 pagesCybr371 Final AssignmentJakob CokerNo ratings yet
- Colendi Technical Paper: ERC-725 ERC-735Document12 pagesColendi Technical Paper: ERC-725 ERC-735saroj_007No ratings yet
- Week 1 Quiz Coursera AnswDocument7 pagesWeek 1 Quiz Coursera AnswPraveen Kumar ReddyNo ratings yet
- Distributed Systems Security AssignmentDocument9 pagesDistributed Systems Security AssignmentSara Lopes100% (1)
- Network Security Final ReportDocument23 pagesNetwork Security Final ReportDebsarthak Samantaray100% (1)
- LabManual For Cryptography and Network SecurityDocument14 pagesLabManual For Cryptography and Network SecurityRajeshkannan Vasinathan100% (2)
- 98-367 Instructor GuideDocument44 pages98-367 Instructor Guidesatya2885% (26)
- Hakin9 Extra June 2012Document29 pagesHakin9 Extra June 2012Danilo Caruso100% (1)
- Inspection Resistant Memory ISCA2012Document12 pagesInspection Resistant Memory ISCA2012gimm ethe pidiefNo ratings yet
- New Mission and Opportunity For Mathematics Researchers - Cryptography in The Quantum EraDocument9 pagesNew Mission and Opportunity For Mathematics Researchers - Cryptography in The Quantum EraSusila WindartaNo ratings yet
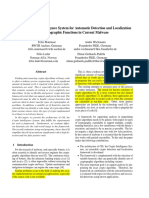
- CIS: The Crypto Intelligence System For Automatic Detection and Localization of Cryptographic Functions in Current MalwareDocument8 pagesCIS: The Crypto Intelligence System For Automatic Detection and Localization of Cryptographic Functions in Current MalwarewaqasNo ratings yet
- Theory Practice Cryptography Network Security All 13Document155 pagesTheory Practice Cryptography Network Security All 13AstrohanumanNo ratings yet
- SoK - Computer-Aided Cryptography - IEEE SP2021Document19 pagesSoK - Computer-Aided Cryptography - IEEE SP2021Nirosh KumarNo ratings yet
- Enviro Risk 2018Document6 pagesEnviro Risk 2018Venkatrajam MNo ratings yet
- Bug Attacks: (Biham, Yanivca) @cs - Technion.ac - Il (Biham, Yanivca)Document20 pagesBug Attacks: (Biham, Yanivca) @cs - Technion.ac - Il (Biham, Yanivca)Anoop ShighNo ratings yet
- Graph RL Malware DetectionDocument8 pagesGraph RL Malware DetectionapprendrerssNo ratings yet
- Anderson 1998Document12 pagesAnderson 1998alexanderfortis8628No ratings yet
- Cryptography Prior To The Modern Age Was Effectively Synonymous WithDocument3 pagesCryptography Prior To The Modern Age Was Effectively Synonymous Withanmathew00No ratings yet
- Application of Classical Encryption Techniques For Securing Data - A Threaded ApproachDocument8 pagesApplication of Classical Encryption Techniques For Securing Data - A Threaded ApproachJames MorenoNo ratings yet
- On The Need of Physical Security For Small Embedded Devices: A Case Study With COMP128-1 Implementations in SIM Cards (Long Version)Document19 pagesOn The Need of Physical Security For Small Embedded Devices: A Case Study With COMP128-1 Implementations in SIM Cards (Long Version)Nicolae BerendeaNo ratings yet
- Chaotic Cryptosystems Cryptanalysis andDocument8 pagesChaotic Cryptosystems Cryptanalysis andMoises Garcia MgmNo ratings yet
- Side-Channel Attacks On Post-Quantum Cryptographic Software ImplementationsDocument4 pagesSide-Channel Attacks On Post-Quantum Cryptographic Software ImplementationsMircea PetrescuNo ratings yet
- CryptographyDocument3 pagesCryptographygerosuarezyahooNo ratings yet
- Research Statement: Vinod VaikuntanathanDocument6 pagesResearch Statement: Vinod VaikuntanathanLohith S JNo ratings yet
- Classes of Attacks and Security Modelsupdated 18052010Document3 pagesClasses of Attacks and Security Modelsupdated 18052010ChrisOAlindiNo ratings yet
- Side-Channel Attacks: Ten Years After Its Publication and The Impacts On Cryptographic Module Security TestingDocument34 pagesSide-Channel Attacks: Ten Years After Its Publication and The Impacts On Cryptographic Module Security TestingAbilashini jayakodyNo ratings yet
- Nonce Generators and The Nonce Reset Problem 2009 Zenner ISCDocument16 pagesNonce Generators and The Nonce Reset Problem 2009 Zenner ISCLibarmyNo ratings yet
- Quantum Attacks Against Iterated Block CiphersDocument14 pagesQuantum Attacks Against Iterated Block Ciphers冰煌雪舞No ratings yet
- Complexity Analysis of AlgorithmsDocument12 pagesComplexity Analysis of AlgorithmsSaad GhouriNo ratings yet
- Threat Detection Model Based On MachineDocument5 pagesThreat Detection Model Based On MachineShehara FernandoNo ratings yet
- Leakage Resilient Elgamal EncryptionDocument18 pagesLeakage Resilient Elgamal EncryptionpandsinNo ratings yet
- Fuzzy Logic Research PaperDocument6 pagesFuzzy Logic Research Paperqtbghsbnd100% (1)
- 1 s2.0 S2590005622000777 MainDocument27 pages1 s2.0 S2590005622000777 MainMila Datul MuharromahNo ratings yet
- WordDocument6 pagesWordJaya ShreeNo ratings yet
- Knapsack Cryptosystem and Its Reduction To 3CNF: February 2011Document5 pagesKnapsack Cryptosystem and Its Reduction To 3CNF: February 2011harshimogalapalliNo ratings yet
- The Increasing Threat To Digital Assets Due To The Development of Quantum AlgorithmsDocument10 pagesThe Increasing Threat To Digital Assets Due To The Development of Quantum AlgorithmscseijNo ratings yet
- Formal Methods and CryptographyDocument6 pagesFormal Methods and CryptographyKiran MudaliyarNo ratings yet
- Seminar Final PagesDocument16 pagesSeminar Final PagesSWASTHIKNo ratings yet
- Encryption and Decryption Process Using Quaternion and Farey Fractions For Secure TransmissionDocument9 pagesEncryption and Decryption Process Using Quaternion and Farey Fractions For Secure TransmissionIRJCS-INTERNATIONAL RESEARCH JOURNAL OF COMPUTER SCIENCENo ratings yet
- Armageddon: Cache Attacks On Mobile DevicesDocument17 pagesArmageddon: Cache Attacks On Mobile DevicesFeisal HarushNo ratings yet
- Armageddon: Cache Attacks On Mobile DevicesDocument17 pagesArmageddon: Cache Attacks On Mobile DevicesFeisal HarushNo ratings yet
- Quantum Computing in Data Security: A Critical Assessment: SSRN Electronic Journal January 2020Document8 pagesQuantum Computing in Data Security: A Critical Assessment: SSRN Electronic Journal January 2020ohood alzaidiNo ratings yet
- SIEM (Security Information and Event Management)Document8 pagesSIEM (Security Information and Event Management)helansoniaajiot121No ratings yet
- Barenghi 2012Document21 pagesBarenghi 2012alexanderfortis8628No ratings yet
- Progress in Multivariate Cryptography Systematic ReviewDocument34 pagesProgress in Multivariate Cryptography Systematic ReviewFai ShararNo ratings yet
- Physically Observable Cryptography: Silvio Micali Leonid Reyzin November 29, 2003Document23 pagesPhysically Observable Cryptography: Silvio Micali Leonid Reyzin November 29, 2003Ruxandra CretuNo ratings yet
- Xiong2021 Article CyberSecurityThreatModelingBasDocument21 pagesXiong2021 Article CyberSecurityThreatModelingBascontravelelNo ratings yet
- Effectual Data Integrity Checking Technique Based On Number TheoryDocument5 pagesEffectual Data Integrity Checking Technique Based On Number TheoryiirNo ratings yet
- Profiling Side-Channel Analysis in The Efficient Attacker FrameworkDocument29 pagesProfiling Side-Channel Analysis in The Efficient Attacker FrameworkTran QuyNo ratings yet
- Cyber Security Foundation - Exam Answers - CertiProfDocument8 pagesCyber Security Foundation - Exam Answers - CertiProfDeivis AnguloNo ratings yet
- Stop Tracking Me: An Anti-Detection Type Solution For Anonymous DataDocument6 pagesStop Tracking Me: An Anti-Detection Type Solution For Anonymous DatachristopoulosdNo ratings yet
- Research Papers Computer Network SecurityDocument7 pagesResearch Papers Computer Network Securitytigvxstlg100% (1)
- Master Thesis in Chaotic CryptographyDocument5 pagesMaster Thesis in Chaotic Cryptographyafktdftdvqtiom100% (2)
- Compusoft, 3 (10), 1157-1160 PDFDocument4 pagesCompusoft, 3 (10), 1157-1160 PDFIjact EditorNo ratings yet
- Breaking Cryptographic Implementations Using Deep Learning TechniquesDocument25 pagesBreaking Cryptographic Implementations Using Deep Learning TechniquesAnjishnu MahantaNo ratings yet
- The Next Generation Cognitive Security O PDFDocument22 pagesThe Next Generation Cognitive Security O PDFNurgiantoNo ratings yet
- Beaulieu 2015Document6 pagesBeaulieu 2015alexanderfortis8628No ratings yet
- Encryption and Decryption System Using Rc4Document11 pagesEncryption and Decryption System Using Rc4Atul KhadeNo ratings yet
- 2015 The SIMON and SPECK Lightweight Block CiphersDocument6 pages2015 The SIMON and SPECK Lightweight Block CiphersKristian HendersonNo ratings yet
- Accenture 809668 Quantum Cryptography Whitepaper v05Document23 pagesAccenture 809668 Quantum Cryptography Whitepaper v05Nguyễn Bùi CươngNo ratings yet
- LSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data SystemsDocument9 pagesLSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data Systemsmindworkz proNo ratings yet
- PBKM SADFE2007 ForensicModels PDFDocument13 pagesPBKM SADFE2007 ForensicModels PDFSaicNo ratings yet
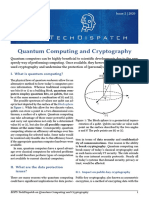
- 07-08-2020 Techdispatch Quantum Computing en 0Document3 pages07-08-2020 Techdispatch Quantum Computing en 0MAKE THE MEGA KNIGHT GREAT AGAIN SUPERCELL PLSNo ratings yet
- An Algorithm To Find Optimal Attack Paths in Nondeterministic ScenariosDocument9 pagesAn Algorithm To Find Optimal Attack Paths in Nondeterministic Scenariosmindhackers161No ratings yet
- DSL Lab - 9Document14 pagesDSL Lab - 9Ankur BorkarNo ratings yet
- Name: Ahammad Nadendla Roll No: B19BB030Document12 pagesName: Ahammad Nadendla Roll No: B19BB030Ankur BorkarNo ratings yet
- Security and Applications: CSL 7080, Assignment 2Document26 pagesSecurity and Applications: CSL 7080, Assignment 2Ankur BorkarNo ratings yet
- Answers For End-Sem Exam Part - 2 (Deep Learning)Document20 pagesAnswers For End-Sem Exam Part - 2 (Deep Learning)Ankur BorkarNo ratings yet
- Module 1Document94 pagesModule 1shreya n patelNo ratings yet
- Cryptography CS 555: Topic 16: Key Management and The Need For Public Key CryptographyDocument21 pagesCryptography CS 555: Topic 16: Key Management and The Need For Public Key Cryptographycrazz1No ratings yet
- This Study Resource Was: CSE 1011:cryptography FundamentalsDocument6 pagesThis Study Resource Was: CSE 1011:cryptography FundamentalsABHAY POTLURI 20BCI0017No ratings yet
- Blockchain Technology PDFDocument6 pagesBlockchain Technology PDFAnirvan VinodNo ratings yet
- E ChequeDocument5 pagesE ChequeKaustubh ShilkarNo ratings yet
- Chap2 CryptographyDocument29 pagesChap2 CryptographyHaslina MahmoodNo ratings yet
- Network Security-Scsa1602Document20 pagesNetwork Security-Scsa1602GokulNo ratings yet
- Auditing in CIS Environment - Auditing Operating Systems and Networks (Final)Document44 pagesAuditing in CIS Environment - Auditing Operating Systems and Networks (Final)Luisito100% (2)
- Task 20 - IOS Penetration Testing ChecklistDocument36 pagesTask 20 - IOS Penetration Testing Checklisttraptanshparihar1No ratings yet
- PGP-S MimeDocument59 pagesPGP-S MimeRAJ TAPASENo ratings yet
- PKI SecurityDocument64 pagesPKI SecurityVivien Di100% (1)
- Full Download Introduction To Computer Security 1st Edition Goodrich Solutions ManualDocument35 pagesFull Download Introduction To Computer Security 1st Edition Goodrich Solutions Manualmetiers2155100% (40)
- Uidai: Registrar Integration Manual Pre-Enrolment, Security & Kyr+ DataDocument45 pagesUidai: Registrar Integration Manual Pre-Enrolment, Security & Kyr+ DataParveen AroraNo ratings yet
- Cry R 2Document6 pagesCry R 2ShazNo ratings yet
- EDocument Italy - Communication Channel Registration 1.0.11Document18 pagesEDocument Italy - Communication Channel Registration 1.0.11niel romanoNo ratings yet
- Sensors: Drone Secure Communication Protocol For Future Sensitive Applications in Military ZoneDocument25 pagesSensors: Drone Secure Communication Protocol For Future Sensitive Applications in Military ZoneLebi AntonyNo ratings yet
- Practice Quiz QuestionsDocument23 pagesPractice Quiz QuestionsLai SaeternNo ratings yet
- Week 10 OS Protection and SecurityDocument80 pagesWeek 10 OS Protection and SecuritySC20A942 Jeme Beseka FonchamNo ratings yet
- Vector Webinar Security ManagerDocument35 pagesVector Webinar Security Managervamsi chodisettiNo ratings yet
- नोंदणी मांकः/ Enrolment No.: 2722/00043/25029: Vid: VID: 9195 7133 2678 4760 9195 7133 2678 4760Document1 pageनोंदणी मांकः/ Enrolment No.: 2722/00043/25029: Vid: VID: 9195 7133 2678 4760 9195 7133 2678 4760Nageshwar ComputersNo ratings yet
- Keys For @winner89Document2 pagesKeys For @winner89sossey alaoui zakariaNo ratings yet
- Quran andDocument163 pagesQuran andhafliz.fmNo ratings yet
- Academy of TechnologyDocument2 pagesAcademy of TechnologyRanajit BiswasNo ratings yet
- ECC WriteupDocument4 pagesECC WriteupPratiksha V PawarNo ratings yet

























































































Download as pdf or txt
You might also like
- Cybr371 Final AssignmentDocument7 pagesCybr371 Final AssignmentJakob CokerNo ratings yet
- Colendi Technical Paper: ERC-725 ERC-735Document12 pagesColendi Technical Paper: ERC-725 ERC-735saroj_007No ratings yet
- Week 1 Quiz Coursera AnswDocument7 pagesWeek 1 Quiz Coursera AnswPraveen Kumar ReddyNo ratings yet
- Distributed Systems Security AssignmentDocument9 pagesDistributed Systems Security AssignmentSara Lopes100% (1)
- Network Security Final ReportDocument23 pagesNetwork Security Final ReportDebsarthak Samantaray100% (1)
- LabManual For Cryptography and Network SecurityDocument14 pagesLabManual For Cryptography and Network SecurityRajeshkannan Vasinathan100% (2)
- 98-367 Instructor GuideDocument44 pages98-367 Instructor Guidesatya2885% (26)
- Hakin9 Extra June 2012Document29 pagesHakin9 Extra June 2012Danilo Caruso100% (1)
- Inspection Resistant Memory ISCA2012Document12 pagesInspection Resistant Memory ISCA2012gimm ethe pidiefNo ratings yet
- New Mission and Opportunity For Mathematics Researchers - Cryptography in The Quantum EraDocument9 pagesNew Mission and Opportunity For Mathematics Researchers - Cryptography in The Quantum EraSusila WindartaNo ratings yet
- CIS: The Crypto Intelligence System For Automatic Detection and Localization of Cryptographic Functions in Current MalwareDocument8 pagesCIS: The Crypto Intelligence System For Automatic Detection and Localization of Cryptographic Functions in Current MalwarewaqasNo ratings yet
- Theory Practice Cryptography Network Security All 13Document155 pagesTheory Practice Cryptography Network Security All 13AstrohanumanNo ratings yet
- SoK - Computer-Aided Cryptography - IEEE SP2021Document19 pagesSoK - Computer-Aided Cryptography - IEEE SP2021Nirosh KumarNo ratings yet
- Enviro Risk 2018Document6 pagesEnviro Risk 2018Venkatrajam MNo ratings yet
- Bug Attacks: (Biham, Yanivca) @cs - Technion.ac - Il (Biham, Yanivca)Document20 pagesBug Attacks: (Biham, Yanivca) @cs - Technion.ac - Il (Biham, Yanivca)Anoop ShighNo ratings yet
- Graph RL Malware DetectionDocument8 pagesGraph RL Malware DetectionapprendrerssNo ratings yet
- Anderson 1998Document12 pagesAnderson 1998alexanderfortis8628No ratings yet
- Cryptography Prior To The Modern Age Was Effectively Synonymous WithDocument3 pagesCryptography Prior To The Modern Age Was Effectively Synonymous Withanmathew00No ratings yet
- Application of Classical Encryption Techniques For Securing Data - A Threaded ApproachDocument8 pagesApplication of Classical Encryption Techniques For Securing Data - A Threaded ApproachJames MorenoNo ratings yet
- On The Need of Physical Security For Small Embedded Devices: A Case Study With COMP128-1 Implementations in SIM Cards (Long Version)Document19 pagesOn The Need of Physical Security For Small Embedded Devices: A Case Study With COMP128-1 Implementations in SIM Cards (Long Version)Nicolae BerendeaNo ratings yet
- Chaotic Cryptosystems Cryptanalysis andDocument8 pagesChaotic Cryptosystems Cryptanalysis andMoises Garcia MgmNo ratings yet
- Side-Channel Attacks On Post-Quantum Cryptographic Software ImplementationsDocument4 pagesSide-Channel Attacks On Post-Quantum Cryptographic Software ImplementationsMircea PetrescuNo ratings yet
- CryptographyDocument3 pagesCryptographygerosuarezyahooNo ratings yet
- Research Statement: Vinod VaikuntanathanDocument6 pagesResearch Statement: Vinod VaikuntanathanLohith S JNo ratings yet
- Classes of Attacks and Security Modelsupdated 18052010Document3 pagesClasses of Attacks and Security Modelsupdated 18052010ChrisOAlindiNo ratings yet
- Side-Channel Attacks: Ten Years After Its Publication and The Impacts On Cryptographic Module Security TestingDocument34 pagesSide-Channel Attacks: Ten Years After Its Publication and The Impacts On Cryptographic Module Security TestingAbilashini jayakodyNo ratings yet
- Nonce Generators and The Nonce Reset Problem 2009 Zenner ISCDocument16 pagesNonce Generators and The Nonce Reset Problem 2009 Zenner ISCLibarmyNo ratings yet
- Quantum Attacks Against Iterated Block CiphersDocument14 pagesQuantum Attacks Against Iterated Block Ciphers冰煌雪舞No ratings yet
- Complexity Analysis of AlgorithmsDocument12 pagesComplexity Analysis of AlgorithmsSaad GhouriNo ratings yet
- Threat Detection Model Based On MachineDocument5 pagesThreat Detection Model Based On MachineShehara FernandoNo ratings yet
- Leakage Resilient Elgamal EncryptionDocument18 pagesLeakage Resilient Elgamal EncryptionpandsinNo ratings yet
- Fuzzy Logic Research PaperDocument6 pagesFuzzy Logic Research Paperqtbghsbnd100% (1)
- 1 s2.0 S2590005622000777 MainDocument27 pages1 s2.0 S2590005622000777 MainMila Datul MuharromahNo ratings yet
- WordDocument6 pagesWordJaya ShreeNo ratings yet
- Knapsack Cryptosystem and Its Reduction To 3CNF: February 2011Document5 pagesKnapsack Cryptosystem and Its Reduction To 3CNF: February 2011harshimogalapalliNo ratings yet
- The Increasing Threat To Digital Assets Due To The Development of Quantum AlgorithmsDocument10 pagesThe Increasing Threat To Digital Assets Due To The Development of Quantum AlgorithmscseijNo ratings yet
- Formal Methods and CryptographyDocument6 pagesFormal Methods and CryptographyKiran MudaliyarNo ratings yet
- Seminar Final PagesDocument16 pagesSeminar Final PagesSWASTHIKNo ratings yet
- Encryption and Decryption Process Using Quaternion and Farey Fractions For Secure TransmissionDocument9 pagesEncryption and Decryption Process Using Quaternion and Farey Fractions For Secure TransmissionIRJCS-INTERNATIONAL RESEARCH JOURNAL OF COMPUTER SCIENCENo ratings yet
- Armageddon: Cache Attacks On Mobile DevicesDocument17 pagesArmageddon: Cache Attacks On Mobile DevicesFeisal HarushNo ratings yet
- Armageddon: Cache Attacks On Mobile DevicesDocument17 pagesArmageddon: Cache Attacks On Mobile DevicesFeisal HarushNo ratings yet
- Quantum Computing in Data Security: A Critical Assessment: SSRN Electronic Journal January 2020Document8 pagesQuantum Computing in Data Security: A Critical Assessment: SSRN Electronic Journal January 2020ohood alzaidiNo ratings yet
- SIEM (Security Information and Event Management)Document8 pagesSIEM (Security Information and Event Management)helansoniaajiot121No ratings yet
- Barenghi 2012Document21 pagesBarenghi 2012alexanderfortis8628No ratings yet
- Progress in Multivariate Cryptography Systematic ReviewDocument34 pagesProgress in Multivariate Cryptography Systematic ReviewFai ShararNo ratings yet
- Physically Observable Cryptography: Silvio Micali Leonid Reyzin November 29, 2003Document23 pagesPhysically Observable Cryptography: Silvio Micali Leonid Reyzin November 29, 2003Ruxandra CretuNo ratings yet
- Xiong2021 Article CyberSecurityThreatModelingBasDocument21 pagesXiong2021 Article CyberSecurityThreatModelingBascontravelelNo ratings yet
- Effectual Data Integrity Checking Technique Based On Number TheoryDocument5 pagesEffectual Data Integrity Checking Technique Based On Number TheoryiirNo ratings yet
- Profiling Side-Channel Analysis in The Efficient Attacker FrameworkDocument29 pagesProfiling Side-Channel Analysis in The Efficient Attacker FrameworkTran QuyNo ratings yet
- Cyber Security Foundation - Exam Answers - CertiProfDocument8 pagesCyber Security Foundation - Exam Answers - CertiProfDeivis AnguloNo ratings yet
- Stop Tracking Me: An Anti-Detection Type Solution For Anonymous DataDocument6 pagesStop Tracking Me: An Anti-Detection Type Solution For Anonymous DatachristopoulosdNo ratings yet
- Research Papers Computer Network SecurityDocument7 pagesResearch Papers Computer Network Securitytigvxstlg100% (1)
- Master Thesis in Chaotic CryptographyDocument5 pagesMaster Thesis in Chaotic Cryptographyafktdftdvqtiom100% (2)
- Compusoft, 3 (10), 1157-1160 PDFDocument4 pagesCompusoft, 3 (10), 1157-1160 PDFIjact EditorNo ratings yet
- Breaking Cryptographic Implementations Using Deep Learning TechniquesDocument25 pagesBreaking Cryptographic Implementations Using Deep Learning TechniquesAnjishnu MahantaNo ratings yet
- The Next Generation Cognitive Security O PDFDocument22 pagesThe Next Generation Cognitive Security O PDFNurgiantoNo ratings yet
- Beaulieu 2015Document6 pagesBeaulieu 2015alexanderfortis8628No ratings yet
- Encryption and Decryption System Using Rc4Document11 pagesEncryption and Decryption System Using Rc4Atul KhadeNo ratings yet
- 2015 The SIMON and SPECK Lightweight Block CiphersDocument6 pages2015 The SIMON and SPECK Lightweight Block CiphersKristian HendersonNo ratings yet
- Accenture 809668 Quantum Cryptography Whitepaper v05Document23 pagesAccenture 809668 Quantum Cryptography Whitepaper v05Nguyễn Bùi CươngNo ratings yet
- LSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data SystemsDocument9 pagesLSTM-based Memory Profiling For Predicting Data Attacks in Distributed Big Data Systemsmindworkz proNo ratings yet
- PBKM SADFE2007 ForensicModels PDFDocument13 pagesPBKM SADFE2007 ForensicModels PDFSaicNo ratings yet
- 07-08-2020 Techdispatch Quantum Computing en 0Document3 pages07-08-2020 Techdispatch Quantum Computing en 0MAKE THE MEGA KNIGHT GREAT AGAIN SUPERCELL PLSNo ratings yet
- An Algorithm To Find Optimal Attack Paths in Nondeterministic ScenariosDocument9 pagesAn Algorithm To Find Optimal Attack Paths in Nondeterministic Scenariosmindhackers161No ratings yet
- DSL Lab - 9Document14 pagesDSL Lab - 9Ankur BorkarNo ratings yet
- Name: Ahammad Nadendla Roll No: B19BB030Document12 pagesName: Ahammad Nadendla Roll No: B19BB030Ankur BorkarNo ratings yet
- Security and Applications: CSL 7080, Assignment 2Document26 pagesSecurity and Applications: CSL 7080, Assignment 2Ankur BorkarNo ratings yet
- Answers For End-Sem Exam Part - 2 (Deep Learning)Document20 pagesAnswers For End-Sem Exam Part - 2 (Deep Learning)Ankur BorkarNo ratings yet
- Module 1Document94 pagesModule 1shreya n patelNo ratings yet
- Cryptography CS 555: Topic 16: Key Management and The Need For Public Key CryptographyDocument21 pagesCryptography CS 555: Topic 16: Key Management and The Need For Public Key Cryptographycrazz1No ratings yet
- This Study Resource Was: CSE 1011:cryptography FundamentalsDocument6 pagesThis Study Resource Was: CSE 1011:cryptography FundamentalsABHAY POTLURI 20BCI0017No ratings yet
- Blockchain Technology PDFDocument6 pagesBlockchain Technology PDFAnirvan VinodNo ratings yet
- E ChequeDocument5 pagesE ChequeKaustubh ShilkarNo ratings yet
- Chap2 CryptographyDocument29 pagesChap2 CryptographyHaslina MahmoodNo ratings yet
- Network Security-Scsa1602Document20 pagesNetwork Security-Scsa1602GokulNo ratings yet
- Auditing in CIS Environment - Auditing Operating Systems and Networks (Final)Document44 pagesAuditing in CIS Environment - Auditing Operating Systems and Networks (Final)Luisito100% (2)
- Task 20 - IOS Penetration Testing ChecklistDocument36 pagesTask 20 - IOS Penetration Testing Checklisttraptanshparihar1No ratings yet
- PGP-S MimeDocument59 pagesPGP-S MimeRAJ TAPASENo ratings yet
- PKI SecurityDocument64 pagesPKI SecurityVivien Di100% (1)
- Full Download Introduction To Computer Security 1st Edition Goodrich Solutions ManualDocument35 pagesFull Download Introduction To Computer Security 1st Edition Goodrich Solutions Manualmetiers2155100% (40)
- Uidai: Registrar Integration Manual Pre-Enrolment, Security & Kyr+ DataDocument45 pagesUidai: Registrar Integration Manual Pre-Enrolment, Security & Kyr+ DataParveen AroraNo ratings yet
- Cry R 2Document6 pagesCry R 2ShazNo ratings yet
- EDocument Italy - Communication Channel Registration 1.0.11Document18 pagesEDocument Italy - Communication Channel Registration 1.0.11niel romanoNo ratings yet
- Sensors: Drone Secure Communication Protocol For Future Sensitive Applications in Military ZoneDocument25 pagesSensors: Drone Secure Communication Protocol For Future Sensitive Applications in Military ZoneLebi AntonyNo ratings yet
- Practice Quiz QuestionsDocument23 pagesPractice Quiz QuestionsLai SaeternNo ratings yet
- Week 10 OS Protection and SecurityDocument80 pagesWeek 10 OS Protection and SecuritySC20A942 Jeme Beseka FonchamNo ratings yet
- Vector Webinar Security ManagerDocument35 pagesVector Webinar Security Managervamsi chodisettiNo ratings yet
- नोंदणी मांकः/ Enrolment No.: 2722/00043/25029: Vid: VID: 9195 7133 2678 4760 9195 7133 2678 4760Document1 pageनोंदणी मांकः/ Enrolment No.: 2722/00043/25029: Vid: VID: 9195 7133 2678 4760 9195 7133 2678 4760Nageshwar ComputersNo ratings yet
- Keys For @winner89Document2 pagesKeys For @winner89sossey alaoui zakariaNo ratings yet
- Quran andDocument163 pagesQuran andhafliz.fmNo ratings yet
- Academy of TechnologyDocument2 pagesAcademy of TechnologyRanajit BiswasNo ratings yet
- ECC WriteupDocument4 pagesECC WriteupPratiksha V PawarNo ratings yet