Download as pdf or txt
You might also like
- Representative Static Load Models For TransientDocument10 pagesRepresentative Static Load Models For TransientNirmal mehtaNo ratings yet
- Voltage Instability ReportDocument24 pagesVoltage Instability ReportPravat Satpathy100% (1)
- Power Semiconductor Devices ClassificationDocument9 pagesPower Semiconductor Devices ClassificationdevchandarNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- Sepic Converter: Prepared ByDocument30 pagesSepic Converter: Prepared BychaitanyaNo ratings yet
- Economical Dispatch Optimal Power Flow and Locational Marginal Pricing - Power Systems Exercise Ariel Villalon MDocument42 pagesEconomical Dispatch Optimal Power Flow and Locational Marginal Pricing - Power Systems Exercise Ariel Villalon MAriel Villalón M100% (1)
- Eee-Viii-power System Operation and Control (06ee82) - NotesDocument138 pagesEee-Viii-power System Operation and Control (06ee82) - Noteskeerthanavijaya100% (3)
- ECE 8830 - Electric Drives: Topic 16: Control of SPM Synchronous Motor DrivesDocument59 pagesECE 8830 - Electric Drives: Topic 16: Control of SPM Synchronous Motor DrivesHassan SouleymanNo ratings yet
- Voltage Profile Improvement Using SVCDocument10 pagesVoltage Profile Improvement Using SVCkubera uNo ratings yet
- Electric Transient Analysing Program (ETAP)Document9 pagesElectric Transient Analysing Program (ETAP)Sulman ShahzadNo ratings yet
- A STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality ImprovementDocument15 pagesA STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality Improvementk rajendraNo ratings yet
- Power System Operation and ControlDocument28 pagesPower System Operation and ControlAgnesNo ratings yet
- Motor Starting: 51.2.1 How To Define A Motor Type and Starting MethodologyDocument10 pagesMotor Starting: 51.2.1 How To Define A Motor Type and Starting Methodologymohamed faisalNo ratings yet
- PSCAD Simulation Model of D-Statcom For Voltage Sag ImprovementDocument4 pagesPSCAD Simulation Model of D-Statcom For Voltage Sag ImprovementposeidondzNo ratings yet
- Ans Power Lab FinalDocument39 pagesAns Power Lab Finalrafia afzalNo ratings yet
- Synchronous MachineDocument32 pagesSynchronous MachineVishal MaheshwariNo ratings yet
- 80C Deduction - Tax Deduction Under Section 80C and Tax PlanningDocument121 pages80C Deduction - Tax Deduction Under Section 80C and Tax PlanningRaamakrishnan Narayanan SankaranarayananNo ratings yet
- Unit Iii - 04.09.2021Document94 pagesUnit Iii - 04.09.2021G.L. Jai Purushotham RajNo ratings yet
- Voltage Fluctuations and Lamp Flicker in Power SystemsDocument12 pagesVoltage Fluctuations and Lamp Flicker in Power SystemsAurongo NasirNo ratings yet
- Closed Loop Control of Grid Connected PV InverterDocument33 pagesClosed Loop Control of Grid Connected PV InverterWA Q ASNo ratings yet
- EE8411 - EM 2 LabDocument6 pagesEE8411 - EM 2 LabVengatNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- 3.6-PSOC Optimized PDFDocument68 pages3.6-PSOC Optimized PDFN R SHEKARNo ratings yet
- Model Development and Validation of Brushless ExcitersDocument8 pagesModel Development and Validation of Brushless ExcitersAmberMeerabNo ratings yet
- Study of Power System Security in Indian Utility 62 Bus SystemDocument10 pagesStudy of Power System Security in Indian Utility 62 Bus SystempjNo ratings yet
- Fault Detection On Radial Power DistributionDocument15 pagesFault Detection On Radial Power DistributionJuan CarlosNo ratings yet
- IEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsDocument3 pagesIEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsmauricetappaNo ratings yet
- Eee 205-W1Document24 pagesEee 205-W1mahamudul hasan100% (1)
- Tecnical Reference WECC Dynamic Composite LoadDocument12 pagesTecnical Reference WECC Dynamic Composite LoadAriel Quispe RojasNo ratings yet
- Unit1 PsocDocument65 pagesUnit1 PsocPraveena GopiNo ratings yet
- Steady-State Stability Limit Studies Using Matlab SimulationDocument12 pagesSteady-State Stability Limit Studies Using Matlab SimulationPius OdabaNo ratings yet
- MVA Method Load Flow CalculationDocument5 pagesMVA Method Load Flow CalculationdskymaximusNo ratings yet
- Introduction To Renewable Energy For Engineers - Ch03 - ImageBank PPT - AccessibleDocument26 pagesIntroduction To Renewable Energy For Engineers - Ch03 - ImageBank PPT - AccessibleEmad Al-Deen Hasan Ekhlif HrahshehNo ratings yet
- Presentation 1Document26 pagesPresentation 1deeksha amuNo ratings yet
- Small Signal Stability of 1 - Machine Infinite BusDocument22 pagesSmall Signal Stability of 1 - Machine Infinite Buspaulrishav93No ratings yet
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- FMDS0523 - Emergency and Standby Power SystemsDocument16 pagesFMDS0523 - Emergency and Standby Power SystemsAnonymous dZOTH3qxJNo ratings yet
- DC Machines: Parts of DC MachineDocument51 pagesDC Machines: Parts of DC MachineKUMARNo ratings yet
- Power Systems Consulting: Efficient Grids For Electric Utilities and Industrial CompaniesDocument41 pagesPower Systems Consulting: Efficient Grids For Electric Utilities and Industrial Companiespmandwani4687No ratings yet
- II - PowerPoint Slides To Chapter 01 IntroductionDocument17 pagesII - PowerPoint Slides To Chapter 01 IntroductionVishesh Dhillon100% (3)
- Modellinag & Simulation With MiPowerDocument5 pagesModellinag & Simulation With MiPowerAkshay SharmaNo ratings yet
- Regulatory Compliance and Generator ControlDocument59 pagesRegulatory Compliance and Generator ControlsulemankhalidNo ratings yet
- Publication 1 19208 6043Document13 pagesPublication 1 19208 6043Stephen Velasco Villaruz0% (1)
- Unit-4 Synchronous & Auto Synchronous Motor: N S N SDocument8 pagesUnit-4 Synchronous & Auto Synchronous Motor: N S N SDharamNo ratings yet
- Synchronous MachinesclassDocument76 pagesSynchronous Machinesclassbhuvana71No ratings yet
- Pes TP TR112 PSDP 090523Document112 pagesPes TP TR112 PSDP 090523chandan.chaudharyaicNo ratings yet
- Assignment 5522 - 3 Lab Worksheet DIgSILENT Power Factory IntroDocument12 pagesAssignment 5522 - 3 Lab Worksheet DIgSILENT Power Factory IntroJenő Ábrahám-KödmönNo ratings yet
- System StabilityDocument32 pagesSystem Stabilityelectron teslaNo ratings yet
- The Elementary Mathematical Model For Synchronous MachinesDocument40 pagesThe Elementary Mathematical Model For Synchronous Machinestyc1986No ratings yet
- Chapter 7 Lecture PowerPointDocument33 pagesChapter 7 Lecture PowerPointkyrwel100% (1)
- Reacive Power:: Problems SolutionsDocument19 pagesReacive Power:: Problems SolutionsUnnikrishnan m100% (1)
- Dynamic Modeling, Design of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemDocument16 pagesDynamic Modeling, Design of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemYellaturi Siva Kishore ReddyNo ratings yet
- Statcom Presentation1Document22 pagesStatcom Presentation1RajasekaranViswaNo ratings yet
- Ancillary Service Operations RRAS PDFDocument25 pagesAncillary Service Operations RRAS PDFskparamNo ratings yet
- Analysis of Transient Performance For DFIG Wind Turbines Under The Open Switch FaultsDocument6 pagesAnalysis of Transient Performance For DFIG Wind Turbines Under The Open Switch Faultsalaaa3No ratings yet
- Method To Improve Power FactorDocument8 pagesMethod To Improve Power Factorasim00786100% (3)
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Grid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterDocument6 pagesGrid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterChetan GhatageNo ratings yet
- Design of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorDocument9 pagesDesign of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorChetan GhatageNo ratings yet
- Doubly-Fed Wind Turbine Mathematical Model and SimulationDocument3 pagesDoubly-Fed Wind Turbine Mathematical Model and SimulationChetan GhatageNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- High Power Matrix Converter For Wind Power Generation ApplicationsDocument6 pagesHigh Power Matrix Converter For Wind Power Generation ApplicationsChetan GhatageNo ratings yet
- Control of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationDocument5 pagesControl of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationChetan GhatageNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Controller Design For A Wind Turbine System Including A Matrix ConverterDocument8 pagesController Design For A Wind Turbine System Including A Matrix ConverterChetan GhatageNo ratings yet
- Application of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorDocument5 pagesApplication of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorChetan GhatageNo ratings yet
- Design and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemDocument4 pagesDesign and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Controller CircuitsDocument14 pagesController CircuitsChetan GhatageNo ratings yet
- What Is Stability?: Stability Analysis in S-DomainDocument19 pagesWhat Is Stability?: Stability Analysis in S-DomainChetan GhatageNo ratings yet
- Atmeg 32 DatasheetDocument19 pagesAtmeg 32 DatasheetChetan GhatageNo ratings yet
- Erco 32232 000 en SpecsDocument4 pagesErco 32232 000 en Specslewyn.socialNo ratings yet
- Selecting Low Voltage Motor StartersDocument114 pagesSelecting Low Voltage Motor StartersJellyn BaseNo ratings yet
- 15DL72Document6 pages15DL72sontuyet82No ratings yet
- Nxt4 Dab e 1.23 WebDocument2 pagesNxt4 Dab e 1.23 WebFelipe AchurraNo ratings yet
- Industrial New Dol 11 55kwand Asd 22 55kw Operating InstructionDocument8 pagesIndustrial New Dol 11 55kwand Asd 22 55kw Operating InstructionRinda_RaynaNo ratings yet
- Montagem Cruise Control SEM Pré-InstalaçãoDocument7 pagesMontagem Cruise Control SEM Pré-InstalaçãoandreabarthNo ratings yet
- 3KC90008TL40 enDocument5 pages3KC90008TL40 enElmer MendozaNo ratings yet
- DBX 386 Dual Tube Mic Preamp SCHDocument21 pagesDBX 386 Dual Tube Mic Preamp SCHPablo RodriguezNo ratings yet
- Solar Pumping Inverter: User's ManualDocument44 pagesSolar Pumping Inverter: User's ManualAvs ElectronNo ratings yet
- Power Electronics Circuits Devices and Applications by Muhammad H RashidDocument602 pagesPower Electronics Circuits Devices and Applications by Muhammad H Rashidkartik balojiNo ratings yet
- An-6076 - Design and Application Guide of Bootstrap Circuit ForDocument13 pagesAn-6076 - Design and Application Guide of Bootstrap Circuit ForwxapazmiNo ratings yet
- OVR T1-T2 3N 12.5-275s P QSDocument1 pageOVR T1-T2 3N 12.5-275s P QSDiego PeñaNo ratings yet
- Aqua VarDocument92 pagesAqua VarAlexander PenadoNo ratings yet
- Architects CatalogueDocument12 pagesArchitects CataloguekennyricksNo ratings yet
- Technical Specs Part II - Electrical WorksDocument7 pagesTechnical Specs Part II - Electrical Workspaul remodoNo ratings yet
- PETI ChecklistDocument1 pagePETI Checklistwan nazeriNo ratings yet
- Rmu - Tgs Tgood - WebDocument62 pagesRmu - Tgs Tgood - WebSói CaNo ratings yet
- 5500 HI Installation Guide (20111031)Document65 pages5500 HI Installation Guide (20111031)yocabezaNo ratings yet
- KBL12400Document2 pagesKBL12400Manuel Diaz GuzmanNo ratings yet
- Three Phase AC Circuit FundamentalsDocument9 pagesThree Phase AC Circuit FundamentalsVikash TiwariNo ratings yet
- 4D2A IEE RegulationDocument1 page4D2A IEE RegulationGoogool Y100% (1)
- CB Test Report Bass Module 321GSDocument265 pagesCB Test Report Bass Module 321GSNikola VasovićNo ratings yet
- Mpr300 CatalogueDocument4 pagesMpr300 CatalogueSanthosh Reddy BNo ratings yet
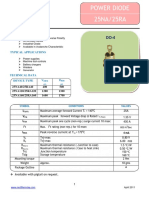
- Power Diode 25NA/25RA: InternationalDocument3 pagesPower Diode 25NA/25RA: InternationalSugiNo ratings yet
- EMI Filters Catalogue 2018 WebDocument88 pagesEMI Filters Catalogue 2018 WebAmir AminiNo ratings yet
- 82-OEMAN-IN Invertek ODE User Guide v1.03 PDFDocument2 pages82-OEMAN-IN Invertek ODE User Guide v1.03 PDFarminNo ratings yet
- EE-442-642-DC-to-AC Converters PDFDocument34 pagesEE-442-642-DC-to-AC Converters PDFLai Viet ThangNo ratings yet
- Pictures of Electronic ComponentsDocument5 pagesPictures of Electronic ComponentsAlexander San Juan100% (9)
- XCMN2102L5: Product Data SheetDocument6 pagesXCMN2102L5: Product Data SheetMário BassoliNo ratings yet
- Servo Válvula NeumaticaDocument30 pagesServo Válvula NeumaticaJaime VelazquezNo ratings yet