Download as doc, pdf, or txt
You might also like
- Air BalticDocument2 pagesAir BalticThiago AndradeNo ratings yet
- L7 - Wellbore Deflection & BHA SelectionDocument32 pagesL7 - Wellbore Deflection & BHA SelectionLaxmi Kant Prasad100% (1)
- Directional DrillingDocument23 pagesDirectional DrillingConstantino Danilo Zapata Mogollon100% (1)
- Basic Drilling Problems & Their Solutions (Part - I) Pipe Sticking, Sloughing Shales & Lost CirculationDocument11 pagesBasic Drilling Problems & Their Solutions (Part - I) Pipe Sticking, Sloughing Shales & Lost CirculationPradyumna Singh RathoreNo ratings yet
- DC July07 LegacyKnowledgeDocument3 pagesDC July07 LegacyKnowledgeklubnikovNo ratings yet
- Bicenter Running ParametersDocument4 pagesBicenter Running ParametersJonathanNo ratings yet
- 03 Drilling Practices R1 Ingold-G Rev 14oct10xDocument77 pages03 Drilling Practices R1 Ingold-G Rev 14oct10xMohamed Ahmed AlyNo ratings yet
- SPE 36827 Drilling Liner Technology For Depleted ReservoirDocument6 pagesSPE 36827 Drilling Liner Technology For Depleted Reservoirmsm.ele2009No ratings yet
- Well Profiles & TerminologyDocument66 pagesWell Profiles & TerminologyPartha Sarathi ChatterjeeNo ratings yet
- DD Ops Guidelines 1 - IPMDocument8 pagesDD Ops Guidelines 1 - IPMEmre Cengiz100% (1)
- Section08 - Drilling Deviated HoleDocument28 pagesSection08 - Drilling Deviated HoleMohamed ElshoraNo ratings yet
- Course WorkDocument6 pagesCourse WorkOlaoluwa OlatonaNo ratings yet
- Mud Logging School: By: Mohamed Ashraf SamirDocument17 pagesMud Logging School: By: Mohamed Ashraf Samirshanujanuuu000No ratings yet
- Quorn: Tool and Cutter GrinderDocument5 pagesQuorn: Tool and Cutter GrinderDan HendersonNo ratings yet
- Side Tracking Cased HolesDocument45 pagesSide Tracking Cased HolesNehomar Jose Brito Guerra100% (4)
- ProblemsDocument10 pagesProblemskrishnsgk100% (1)
- Pile Instalation MethodsDocument7 pagesPile Instalation MethodsMuhammadIqbalMughalNo ratings yet
- CSNG Centralizers PaperDocument5 pagesCSNG Centralizers PaperAlexNo ratings yet
- Wellbore Sidetracking GuidelinesDocument5 pagesWellbore Sidetracking Guidelinesmadonnite3781No ratings yet
- Class # 5.1 - Natural and Mechanical FactorsDocument15 pagesClass # 5.1 - Natural and Mechanical FactorsIlyas KhanNo ratings yet
- General Information: Instruction Manual Portable Static Cone PenetrometerDocument4 pagesGeneral Information: Instruction Manual Portable Static Cone PenetrometerAbdelhamid ElgasaierNo ratings yet
- حل امتحان خالدهDocument15 pagesحل امتحان خالدهMohamed MamdouhNo ratings yet
- BHA StabilizationDocument14 pagesBHA StabilizationenantioagaNo ratings yet
- Deflection Tools and Techniques: WhipstocksDocument4 pagesDeflection Tools and Techniques: WhipstocksS MariusNo ratings yet
- Wellbore Sidetracking GuidelinesDocument4 pagesWellbore Sidetracking Guidelinesmadonnite3781No ratings yet
- Downhole Motors PDFDocument15 pagesDownhole Motors PDFarasquare100% (1)
- Air Formasi AdalahDocument9 pagesAir Formasi AdalahAlfredho MarkusNo ratings yet
- M-S-215 Static Cone PenetrometerDocument4 pagesM-S-215 Static Cone PenetrometerJunpieter GultomNo ratings yet
- Casing Design: Drilling ReportDocument10 pagesCasing Design: Drilling Reportمحمد علي كريم شكر100% (1)
- Cone CrushersDocument18 pagesCone CrushersRodrigo GarcíaNo ratings yet
- AgitatorDocument10 pagesAgitatorSachin5586No ratings yet
- Drilling With Casing 04Document15 pagesDrilling With Casing 04Dian Sikumbang100% (2)
- The Best of Both Worlds-A Hybrid Rotary Steerable System: Oklahoma City, Oklahoma, USADocument9 pagesThe Best of Both Worlds-A Hybrid Rotary Steerable System: Oklahoma City, Oklahoma, USAStefany Jimenez MendozaNo ratings yet
- Introduction To Drilling TechnologyDocument68 pagesIntroduction To Drilling TechnologyKrupal Patel100% (1)
- Drilling: Vertical, For SimplicityDocument8 pagesDrilling: Vertical, For Simplicitymohammad teimuriNo ratings yet
- Drilling PracticesDocument95 pagesDrilling PracticesNicolas Gutierrez Schmidt100% (2)
- Sidetracking PrinciplesDocument3 pagesSidetracking PrinciplesDon BraithwaiteNo ratings yet
- 04 Slide DrillingDocument7 pages04 Slide Drillingmsm.ele2009100% (1)
- Sec3 Well Spud and Guide StructuresDocument15 pagesSec3 Well Spud and Guide StructuresDonald StraubNo ratings yet
- Coiled TubingDocument6 pagesCoiled Tubingneal d fearless dreamerNo ratings yet
- Honing Procedures For LinerDocument6 pagesHoning Procedures For LinersughieantoNo ratings yet
- Teoria SidetrackDocument5 pagesTeoria SidetrackAndres LojaNo ratings yet
- Drilling Practices R1 Ingold-GDocument95 pagesDrilling Practices R1 Ingold-GMatt Farman100% (2)
- Rotary Bha Ingold r3xDocument56 pagesRotary Bha Ingold r3xUsama Bin Sabir100% (2)
- Water Well Drilling MethodsDocument21 pagesWater Well Drilling MethodsAry Rachman100% (3)
- 45-Mud Hole CleaningDocument11 pages45-Mud Hole CleaningFreddy Quintero100% (1)
- 01 Surface Spooled (Stack-Up) WellheadsDocument111 pages01 Surface Spooled (Stack-Up) WellheadsYoucef LiasNo ratings yet
- 6 141023133550 Conversion Gate02Document48 pages6 141023133550 Conversion Gate02Namwangala Rashid NatinduNo ratings yet
- IRECN Bridge Bearing-3Document21 pagesIRECN Bridge Bearing-3vpmohammed100% (1)
- Cement Stinger Balanced PlugDocument13 pagesCement Stinger Balanced Plugjsever1No ratings yet
- 6 141023133550 Conversion Gate02Document48 pages6 141023133550 Conversion Gate02WajidSarwarNo ratings yet
- Pile Instalation Methods 2Document9 pagesPile Instalation Methods 2Bright MuzaNo ratings yet
- 3481 Quorn 02Document4 pages3481 Quorn 02Andy LNo ratings yet
- Quorn: Tool and Cutter GrinderDocument4 pagesQuorn: Tool and Cutter GrinderDan HendersonNo ratings yet
- Horizontal Cleanning Paper SPEDocument9 pagesHorizontal Cleanning Paper SPEManuel PerdomoNo ratings yet
- Gallozapata 2010Document8 pagesGallozapata 2010paimanNo ratings yet
- Portable Static Cone PenetrometerDocument8 pagesPortable Static Cone PenetrometerFawwaz HaadiiNo ratings yet
- Chapter (4) Drilling Methods and Type of RigsDocument26 pagesChapter (4) Drilling Methods and Type of RigsFarhat Mirza100% (1)
- Steam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversFrom EverandSteam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversRating: 5 out of 5 stars5/5 (2)
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingFrom EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingNo ratings yet
- Surface Kill Sheet 1 AnswersDocument3 pagesSurface Kill Sheet 1 AnswersFarouq Eng100% (1)
- An Introduction To Drilling Dynamics: All Rights ReservedDocument34 pagesAn Introduction To Drilling Dynamics: All Rights ReservedFarouq Eng100% (1)
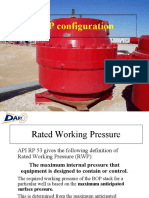
- BOP ConfigurationsDocument12 pagesBOP ConfigurationsFarouq EngNo ratings yet
- Pumps & Tripping - Pump Outputs - Strokes & Time - Annular Velocity - Tripping PipeDocument13 pagesPumps & Tripping - Pump Outputs - Strokes & Time - Annular Velocity - Tripping PipeFarouq EngNo ratings yet
- WELL TEST - New1Document61 pagesWELL TEST - New1Farouq EngNo ratings yet
- Roller Cone Bit Dull Grading System: All Rights ReservedDocument106 pagesRoller Cone Bit Dull Grading System: All Rights ReservedFarouq EngNo ratings yet
- PDC Bit Design: Bit Profile and Cutter OrientationDocument23 pagesPDC Bit Design: Bit Profile and Cutter OrientationFarouq Eng100% (1)
- Agenda: Well Testing Overview Safety & Pom Well Test Types Clean Up Well Test Data Surface Testing EquipmentDocument23 pagesAgenda: Well Testing Overview Safety & Pom Well Test Types Clean Up Well Test Data Surface Testing EquipmentFarouq EngNo ratings yet
- Introduction of Drill Stem TestingDocument17 pagesIntroduction of Drill Stem TestingFarouq EngNo ratings yet
- 14 - Torque and Drag CalculationsDocument10 pages14 - Torque and Drag CalculationsFarouq EngNo ratings yet
- 5 - Survey Calculation MethodsDocument13 pages5 - Survey Calculation MethodsFarouq EngNo ratings yet
- 5 - Bit Hydraulic OptimizationDocument31 pages5 - Bit Hydraulic OptimizationFarouq EngNo ratings yet
- 6 Common TesdaDocument28 pages6 Common TesdaStevenNo ratings yet
- Introduction To Extension EducationDocument13 pagesIntroduction To Extension Educationsharath50% (2)
- Random Walk ProblemDocument6 pagesRandom Walk ProblemAdamNo ratings yet
- Jin KimDocument1 pageJin KimAnonymous 8tIeVPUKidNo ratings yet
- Macromedia Fireworks MX Basic Tutorial: Creating A New DocumentDocument6 pagesMacromedia Fireworks MX Basic Tutorial: Creating A New Documentamadeus_x64No ratings yet
- Party Wise Sales DetailsDocument7 pagesParty Wise Sales DetailsDeepak ChandraNo ratings yet
- Current LogDocument10 pagesCurrent LogHernan BritoNo ratings yet
- Ruskin BondDocument11 pagesRuskin BondnikhilNo ratings yet
- Aseptic TechniquesDocument6 pagesAseptic TechniquesAinun MokhtarNo ratings yet
- Correlation Analysis of Heat Flux and Cone Calorimeter Test Data of Commercial Flame-Retardant EPDM RubberDocument12 pagesCorrelation Analysis of Heat Flux and Cone Calorimeter Test Data of Commercial Flame-Retardant EPDM RubberFairmont Ind Quality DivisionNo ratings yet
- Unit 6 Induction: Prepared by Martha NamutuwaDocument15 pagesUnit 6 Induction: Prepared by Martha NamutuwaMatovu23 Sharif23No ratings yet
- Specification: Constant Current Discharge Characteristics: A (25)Document2 pagesSpecification: Constant Current Discharge Characteristics: A (25)Mahmoud EL-SayedNo ratings yet
- Nebraska Medical Marijuana LawsuitDocument13 pagesNebraska Medical Marijuana LawsuitMarijuana MomentNo ratings yet
- Agreement in Restraint of Trade-ExceptionsDocument15 pagesAgreement in Restraint of Trade-ExceptionsNishita GuptaNo ratings yet
- Sas N5 Cie112Document6 pagesSas N5 Cie112Carlo FloresNo ratings yet
- Hello Kitty - The Iconic Japanese BrandDocument5 pagesHello Kitty - The Iconic Japanese BrandMaya SalmanNo ratings yet
- ArchibusDocument12 pagesArchibusapi-256135737No ratings yet
- AFM Case Study Q1,2Document3 pagesAFM Case Study Q1,2lim hui mengNo ratings yet
- It Assignment 2014Document143 pagesIt Assignment 2014Preeti GahlotNo ratings yet
- Accounting For Special TransactionsDocument13 pagesAccounting For Special Transactionsviva nazarenoNo ratings yet
- TeamWork Intro Slides For IIT DelhiDocument15 pagesTeamWork Intro Slides For IIT DelhiVIVEK KUMARNo ratings yet
- Microcode Update GuidanceDocument14 pagesMicrocode Update Guidanceproxymo1No ratings yet
- UCM Notes PDFDocument92 pagesUCM Notes PDFTIRUPATHI KARTIKEYANo ratings yet
- Booth MakersDocument5 pagesBooth Makerslala_omgNo ratings yet
- Claim Duit Thesis JpaDocument5 pagesClaim Duit Thesis Jpaafkofvidg100% (2)
- Creating Cust Specific POWL Query PDFDocument3 pagesCreating Cust Specific POWL Query PDFvictorSNo ratings yet
- Admit Card: Araksha Bhavan (5Th Floor), 6Th Cross Road, Block-Dj, Sector-Ii, Salt Lake City, Kolkata-700 091Document1 pageAdmit Card: Araksha Bhavan (5Th Floor), 6Th Cross Road, Block-Dj, Sector-Ii, Salt Lake City, Kolkata-700 091Ayesha HignisNo ratings yet
- Deed of Release PowaleDocument5 pagesDeed of Release Powaleswati GawdeNo ratings yet
- BAYE's TheormDocument27 pagesBAYE's TheormPravalika ReddyNo ratings yet