Download as pdf or txt
You might also like
- Govan Catalog 2009Document86 pagesGovan Catalog 2009Rizwan IqbalNo ratings yet
- Solution Manual Mechanical Engineering Principles John Bird 1Document24 pagesSolution Manual Mechanical Engineering Principles John Bird 1ridwansadely100% (1)
- 3D-Shapes Symmetry Patterns-Term2 WorksheetDocument3 pages3D-Shapes Symmetry Patterns-Term2 Worksheetmahroof50% (2)
- Computer Architecture and Assembly LanguageDocument2 pagesComputer Architecture and Assembly LanguageasifanisNo ratings yet
- QP Repoistory - APR-MAY 2022-19EC403-CTDocument17 pagesQP Repoistory - APR-MAY 2022-19EC403-CTGurunathanNo ratings yet
- 19ME411Document17 pages19ME411Aravind KumarNo ratings yet
- Convert The Voltage Source Into Current Source in The FigDocument16 pagesConvert The Voltage Source Into Current Source in The FigSaranya AthipatlaNo ratings yet
- 19CS406 CN QR-1Document13 pages19CS406 CN QR-1nandyalamalyadrireddy205No ratings yet
- CA QR Ans Key 23 24 Even SemDocument59 pagesCA QR Ans Key 23 24 Even Semnandyalamalyadrireddy205No ratings yet
- 19ec412 - CN-QR - Answer Key April 2023 NewDocument56 pages19ec412 - CN-QR - Answer Key April 2023 NewGurunathanNo ratings yet
- CS8074 Cyber Forensics 2021-22 Question RepositoryDocument14 pagesCS8074 Cyber Forensics 2021-22 Question RepositoryDeepu Deepak100% (1)
- 19IT406- Grid and Cloud Computing -Question Repository 30 May 2022Document13 pages19IT406- Grid and Cloud Computing -Question Repository 30 May 2022shizuka shizukaNo ratings yet
- ElectricDocument12 pagesElectricprabhu4scribdNo ratings yet
- Maths QB-1Document4 pagesMaths QB-1Yash SharmaNo ratings yet
- Internal I Set IiDocument2 pagesInternal I Set IiSHAIK ROSHANNo ratings yet
- Kec 601 DCDocument5 pagesKec 601 DCakash kumarNo ratings yet
- QA101 What Is The Scope of Engineering Ethics? CO1 K2 2Document13 pagesQA101 What Is The Scope of Engineering Ethics? CO1 K2 2Saranya AthipatlaNo ratings yet
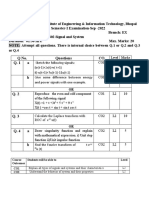
- Signal and System EX-302 (Sept.2022 Prachi Parashar)Document1 pageSignal and System EX-302 (Sept.2022 Prachi Parashar)Prachi ParasharNo ratings yet
- 19EC516 - QR - HDL Programming APRIL 2024Document15 pages19EC516 - QR - HDL Programming APRIL 2024Nanda KishoreNo ratings yet
- Mid Sem 1Document5 pagesMid Sem 1uttkarsh singhNo ratings yet
- 2023 TLRF EC3551 CT 2 Set ADocument2 pages2023 TLRF EC3551 CT 2 Set AJ edward paulrajNo ratings yet
- Square Wave ResponseDocument4 pagesSquare Wave ResponseManjuNo ratings yet
- AITS Part 4 P2 SolutionsDocument18 pagesAITS Part 4 P2 SolutionsArchit AgarwalNo ratings yet
- Aits 2223Document16 pagesAits 2223Nirbhik GuptaNo ratings yet
- Practice Test - 7, Atomic Structure and Gaseous StateDocument12 pagesPractice Test - 7, Atomic Structure and Gaseous StateBadNik 007No ratings yet
- School of Engineering and TechnologyDocument2 pagesSchool of Engineering and TechnologyAMRIT SAHNo ratings yet
- Put Kec603 AntennaDocument4 pagesPut Kec603 Antennaakash kumarNo ratings yet
- Concept Strengthenig Sheet (CSS-04 - AIATS - TYM-2025 - Test-04 (Ph-03 & 04) ChemistryDocument4 pagesConcept Strengthenig Sheet (CSS-04 - AIATS - TYM-2025 - Test-04 (Ph-03 & 04) ChemistryAyush SharmaNo ratings yet
- 01 # Assignment - Eng (Conductor) 20 JuneDocument10 pages01 # Assignment - Eng (Conductor) 20 JuneLonely PotatoNo ratings yet
- Physics EoS1 1819 V2Document12 pagesPhysics EoS1 1819 V2farid oluwasegun SHITTUNo ratings yet
- 1st Sem - ESEDocument8 pages1st Sem - ESEaditya ManhasNo ratings yet
- Graphical View 15-03-2021 EAGLES POINTSDocument2 pagesGraphical View 15-03-2021 EAGLES POINTSpratikNo ratings yet
- 02 PLL 180809Document24 pages02 PLL 180809ma3644No ratings yet
- PracClass 2 2019 3Document35 pagesPracClass 2 2019 3Maqsood ShaikNo ratings yet
- AnalogDocument12 pagesAnalogprabhu4scribdNo ratings yet
- JEE Main Online Exam 2019: (Memory Based Paper)Document5 pagesJEE Main Online Exam 2019: (Memory Based Paper)Deepak SainiNo ratings yet
- JEE Main 2019 Paper Answer Physics 10-01-2019 2ndDocument5 pagesJEE Main 2019 Paper Answer Physics 10-01-2019 2ndChayan SinhaNo ratings yet
- Ans&Sol JEE (Main) 2024 Ph-2 (04-04-2024) EveningDocument21 pagesAns&Sol JEE (Main) 2024 Ph-2 (04-04-2024) Eveningrohit singhNo ratings yet
- Question PaperDocument15 pagesQuestion PaperSidNo ratings yet
- Orthogonal Frequency Division Multiplexing (Ofdm) Transmission TechnologyDocument15 pagesOrthogonal Frequency Division Multiplexing (Ofdm) Transmission TechnologyDante LupuNo ratings yet
- CU4071 Ia1Document1 pageCU4071 Ia1HARIPRASATH ECENo ratings yet
- Network Analysis (ECE - 2103) (Make Up) RCSDocument3 pagesNetwork Analysis (ECE - 2103) (Make Up) RCSNaveen KumarNo ratings yet
- CMR Technical Campus: Dept. of Electronics & Communication EngineeringDocument5 pagesCMR Technical Campus: Dept. of Electronics & Communication EngineeringsudhamaniNo ratings yet
- I - Mid (R20) (Bee) (2021 - 2022)Document2 pagesI - Mid (R20) (Bee) (2021 - 2022)Aarush PitlaNo ratings yet
- KAS303, MathsIII - PUE, SET1 (Final)Document2 pagesKAS303, MathsIII - PUE, SET1 (Final)vaibhavchaudhary701744No ratings yet
- 10 - Dr. M. Atia - Gas Power Cycles-Diesel CycleDocument16 pages10 - Dr. M. Atia - Gas Power Cycles-Diesel CycleBahaa RaghebNo ratings yet
- Multichannel Pulse Spectrometry: Po PB Bi PoDocument6 pagesMultichannel Pulse Spectrometry: Po PB Bi Potarek mahmoudNo ratings yet
- GATE ECE Model Question Paper Solved 3Document25 pagesGATE ECE Model Question Paper Solved 3biswajitntpcNo ratings yet
- Maths QB-2Document5 pagesMaths QB-2Yash SharmaNo ratings yet
- Signals and System CT-1 QP Set A 2023Document3 pagesSignals and System CT-1 QP Set A 2023J edward paulrajNo ratings yet
- Q.No Questions Unit Area CO Mapping BT Level Complexity MarksDocument5 pagesQ.No Questions Unit Area CO Mapping BT Level Complexity MarksThomas Praveen JosephNo ratings yet
- Final 2016Document15 pagesFinal 2016Julia CNo ratings yet
- Maths Iv Kas402 2021Document3 pagesMaths Iv Kas402 2021aiml21040No ratings yet
- Welcom E: Communication Signals & Systems DesignDocument7 pagesWelcom E: Communication Signals & Systems DesignAli BaigNo ratings yet
- Analog Communication AM DemodulatorsDocument2 pagesAnalog Communication AM DemodulatorsGOHIL AJAYKUMAR SHANKARBHAINo ratings yet
- M.E - QB ModiDocument6 pagesM.E - QB Modisiba jasmine sNo ratings yet
- Lic Unit Test 2 - Set 1Document1 pageLic Unit Test 2 - Set 1G.MUNEER BABA,EEE18 Vel Tech, ChennaiNo ratings yet
- Module 5 (Me 213)Document22 pagesModule 5 (Me 213)Joshua S. LanzaderasNo ratings yet
- Chapter: Modulation, Demodulation, Signal Sampling: Time of Study: Goals: The Student Should Be Able ToDocument47 pagesChapter: Modulation, Demodulation, Signal Sampling: Time of Study: Goals: The Student Should Be Able ToCristian MattaNo ratings yet
- Loyola Institute of TechnologyDocument2 pagesLoyola Institute of TechnologySoorya Priya Gopala KrishnaNo ratings yet
- CIST DJJ20073 Sesi I 2022 - 23 (1) (1) - SignedDocument1 pageCIST DJJ20073 Sesi I 2022 - 23 (1) (1) - SignedMohd Nazri SaadNo ratings yet
- SIGNALS AND SYSTEM CT-1 QP Set B 2023Document2 pagesSIGNALS AND SYSTEM CT-1 QP Set B 2023J edward paulrajNo ratings yet
- Data TypesDocument12 pagesData TypesRajyaLakshmi100% (1)
- Non IdealDocument29 pagesNon IdealAmin SyazrinNo ratings yet
- Power Factor Correction: Wiseman Nene Eit - Electrical Eston Sugar MillDocument42 pagesPower Factor Correction: Wiseman Nene Eit - Electrical Eston Sugar MillPushpendraMeenaNo ratings yet
- Photoshop-Elements Reference PDFDocument376 pagesPhotoshop-Elements Reference PDFInahoNo ratings yet
- Zaha HadidDocument14 pagesZaha Hadidjanhavi28No ratings yet
- National Council of Teachers of Mathematics Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The Mathematics TeacherDocument6 pagesNational Council of Teachers of Mathematics Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The Mathematics TeacherfadzilNo ratings yet
- Phenomenology Meets SemioticsDocument23 pagesPhenomenology Meets SemioticsAli PatelNo ratings yet
- Travelpilot Rns 3: Installation InstructionsDocument8 pagesTravelpilot Rns 3: Installation InstructionsEttoreNo ratings yet
- Rigid 10k DatasheetDocument2 pagesRigid 10k DatasheetAna Maria RodrigoNo ratings yet
- Lms Length Boys 3mon PDocument1 pageLms Length Boys 3mon PArdi IswaraNo ratings yet
- CNN-Based Network Intrusion Detection Against Denial-of-Service AttacksDocument21 pagesCNN-Based Network Intrusion Detection Against Denial-of-Service AttacksAditi Biswas100% (1)
- Q2 Math 6Document7 pagesQ2 Math 6JUVY PONTILLASNo ratings yet
- ParallelismDocument22 pagesParallelismdeivasigamaniNo ratings yet
- Support Reactions, Maximum Moment and DeflectionDocument2 pagesSupport Reactions, Maximum Moment and DeflectionYan Kim LeongNo ratings yet
- Mineralisation of DevelopmentallyDocument5 pagesMineralisation of DevelopmentallyRiad BachoNo ratings yet
- ATi Radeon R300 SeriesDocument5 pagesATi Radeon R300 SeriesHeikkiNo ratings yet
- Written Report ProbabilityDocument8 pagesWritten Report ProbabilitySherl Escandor100% (1)
- StoichiometryDocument26 pagesStoichiometryClaus LawrenceNo ratings yet
- Mathematics p1 (Eng) 2024Document10 pagesMathematics p1 (Eng) 2024Mahlatse S Sedibeng100% (1)
- Voltage Drop & Cable Sizing & Electrical LoadDocument26 pagesVoltage Drop & Cable Sizing & Electrical Loadfd270% (1)
- Rebuilding Rails - Free ChaptersDocument45 pagesRebuilding Rails - Free ChaptersfarmisenNo ratings yet
- Trinabh Shridhar - Individual Quiz CompletedDocument11 pagesTrinabh Shridhar - Individual Quiz CompletedSneha DhamijaNo ratings yet
- DX DiagDocument30 pagesDX Diagtheresa.rgscapizNo ratings yet
- Application ListDocument30 pagesApplication ListMario AlcazabaNo ratings yet
- Metal PlasticityDocument13 pagesMetal PlasticityAmando GallardoNo ratings yet
- 01 Probability and StatisticsDocument8 pages01 Probability and Statisticsguillermo_pacaninsNo ratings yet
- 10 10 Physics Physics: Short Question Answers. Short Question Answers.Document44 pages10 10 Physics Physics: Short Question Answers. Short Question Answers.حمزہ ایوبNo ratings yet