
Critical Clearing Angle and Critical Clearing Time:-: Rohini College of Engineering & Technology
Critical Clearing Angle and Critical Clearing Time:-: Rohini College of Engineering & Technology
You might also like
- Bids For Connection Quiz - GottmanDocument4 pagesBids For Connection Quiz - GottmanHollie123083% (6)
- CSE 474/574 Introduction To Machine Learning Fall 2011 Assignment 3Document3 pagesCSE 474/574 Introduction To Machine Learning Fall 2011 Assignment 3kwzeetNo ratings yet
- Case Study: Sanofi: Dispensing The Drug LordDocument8 pagesCase Study: Sanofi: Dispensing The Drug Lordpersephone hadesNo ratings yet
- 1487251639EE 2017 - Session 1 (Kreatryx Solutions)Document40 pages1487251639EE 2017 - Session 1 (Kreatryx Solutions)Utkarsh RajNo ratings yet
- CIE Publist 2011 FebruaryDocument11 pagesCIE Publist 2011 FebruaryMido AbdoNo ratings yet
- Mechanical Full Solution: GATE - 2017Document26 pagesMechanical Full Solution: GATE - 2017GIPPY SINGHNo ratings yet
- Alt ProjDocument9 pagesAlt ProjShy PeachDNo ratings yet
- 1 s2.0 S1474667016377849 MainDocument6 pages1 s2.0 S1474667016377849 Mainprachi singhNo ratings yet
- Klerk Et Al. - This Document Is Downloaded From DR-NTU, Nanyang Technological University Library, Singapore - 2008Document16 pagesKlerk Et Al. - This Document Is Downloaded From DR-NTU, Nanyang Technological University Library, Singapore - 2008xjohannNo ratings yet
- The Growth Model in Continuous Time (Ramsey Model) : Prof. Lutz HendricksDocument36 pagesThe Growth Model in Continuous Time (Ramsey Model) : Prof. Lutz HendricksAji SakaNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- BuckBoostExercise 435Document4 pagesBuckBoostExercise 435New CashNo ratings yet
- Simulation Power ElectronicDocument5 pagesSimulation Power Electronicchroeun sokayNo ratings yet
- Two-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For LinearDocument10 pagesTwo-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For Linearnaruse10No ratings yet
- EC 2008 With SolutionsDocument45 pagesEC 2008 With SolutionsBedadipta BainNo ratings yet
- Question Paper Code: X85762: Aeronautical EngineeringDocument3 pagesQuestion Paper Code: X85762: Aeronautical EngineeringSHANMUGARAJ MADASAMYNo ratings yet
- Answer: - (B) Explanation:-: Q. No. 1 - 25 Carry One Mark EachDocument22 pagesAnswer: - (B) Explanation:-: Q. No. 1 - 25 Carry One Mark EachTejas KumarNo ratings yet
- SD Lab ReportDocument10 pagesSD Lab ReportYuvraj TyagiNo ratings yet
- Potential Energy Approach (Rayleigh Ritz Method)Document16 pagesPotential Energy Approach (Rayleigh Ritz Method)Amit KashyapNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- 08 Differential Equations - Second Order LDE ApplicationsDocument25 pages08 Differential Equations - Second Order LDE ApplicationsRemo Rubian EvangelistaNo ratings yet
- APSPDCL-2012 SolutionsDocument11 pagesAPSPDCL-2012 SolutionsbhargaviNo ratings yet
- Pi and Pi-L Network EquationsDocument13 pagesPi and Pi-L Network Equationsdavid reyesNo ratings yet
- Stability 4Document15 pagesStability 4CaribNo ratings yet
- State Space Mimo PlantDocument4 pagesState Space Mimo PlantMalathy NNo ratings yet
- Macroeconomics 1 PS4 PDFDocument3 pagesMacroeconomics 1 PS4 PDFTaib MuffakNo ratings yet
- Line and Surface Integral-1Document39 pagesLine and Surface Integral-1kalimaster2653No ratings yet
- CONDUCTIONDocument19 pagesCONDUCTIONNwose Emmanuel N.No ratings yet
- Instrumentation & Measurement SystemsDocument7 pagesInstrumentation & Measurement SystemsAnkit KumarNo ratings yet
- BQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Document6 pagesBQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Marcos BenícioNo ratings yet
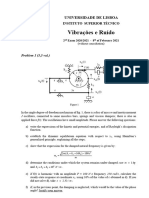
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- GATE EE 2005 With SolutionsDocument53 pagesGATE EE 2005 With SolutionsAbhishek Mohan50% (2)
- Equações Mecanicas Do MotoresDocument10 pagesEquações Mecanicas Do MotoresTiago FariaNo ratings yet
- EECE 5550 Mobile Robotics Lab #4: Due: Nov 21, 2022Document6 pagesEECE 5550 Mobile Robotics Lab #4: Due: Nov 21, 2022isic.mirjanaNo ratings yet
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDocument9 pagesChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqNo ratings yet
- GATE ECE 2006 Actual PaperDocument21 pagesGATE ECE 2006 Actual Paperkibrom atsbhaNo ratings yet
- Trans LinesDocument8 pagesTrans LinesariehashimieNo ratings yet
- Mid Sem 3Document11 pagesMid Sem 3BROJO CHAND GAYENNo ratings yet
- Source and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Document17 pagesSource and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Adarsh AnchiNo ratings yet
- ME-Paper Code-A GATE 2011: Answer: - (B) ExplanationDocument23 pagesME-Paper Code-A GATE 2011: Answer: - (B) ExplanationSuhas NatuNo ratings yet
- Transmission Line Write UpDocument10 pagesTransmission Line Write UpAbhishek AgrawalNo ratings yet
- Modelling of IM Using DQ TransformationDocument64 pagesModelling of IM Using DQ Transformationdivinelight100% (1)
- Pc-Ee 601Document36 pagesPc-Ee 601Koustav SahaNo ratings yet
- Department of Electrical Engineering Piemr, Indore: Experiment No: 01Document41 pagesDepartment of Electrical Engineering Piemr, Indore: Experiment No: 01Aayush PatidarNo ratings yet
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDocument10 pagesMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNo ratings yet
- FPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmDocument13 pagesFPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmGovind AtalNo ratings yet
- LINE INTEGRAL - Part 1Document25 pagesLINE INTEGRAL - Part 1Mohd Afiq AminNo ratings yet
- Design Based AssignmentDocument10 pagesDesign Based Assignmentnan.sayan30No ratings yet
- ECE710 Space Time Coding For Wireless CommunicationDocument10 pagesECE710 Space Time Coding For Wireless Communicationjivi sadirovNo ratings yet
- Pdfد.عيد أسئلة المرجعDocument59 pagesPdfد.عيد أسئلة المرجعMohamed ElkhtiarNo ratings yet
- Series de PuseuixDocument13 pagesSeries de PuseuixGabrielBenícioNo ratings yet
- T4 (8.3-10.5) sp17.tstDocument3 pagesT4 (8.3-10.5) sp17.tstjuanesz98No ratings yet
- Appendix A. The DQ TransformationDocument8 pagesAppendix A. The DQ TransformationtiagokjNo ratings yet
- One Dimensional Piston Problem: Tel: 631-5736 Email:atassi.1@nd - EduDocument4 pagesOne Dimensional Piston Problem: Tel: 631-5736 Email:atassi.1@nd - EdumohammadtariNo ratings yet
- ME GATE 2017 Set I Key SolutionDocument25 pagesME GATE 2017 Set I Key SolutionBeesam Ramesh KumarNo ratings yet
- 63ufrep 13.EC FullSyllabusPaper-II (Solutions)Document42 pages63ufrep 13.EC FullSyllabusPaper-II (Solutions)Saty Prakash YadavNo ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Pipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorDocument4 pagesPipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorMohamed GanounNo ratings yet
- IEEE Power System Paper-Modeling and State Feedback Controller For Current Source Inverter Based STATCOMDocument6 pagesIEEE Power System Paper-Modeling and State Feedback Controller For Current Source Inverter Based STATCOMAnoop MathewNo ratings yet
- Assignment 3 Soln Electric ChargesDocument13 pagesAssignment 3 Soln Electric Chargeswarrior techNo ratings yet
- Gause Sei DalDocument5 pagesGause Sei DalMd Masud AlamNo ratings yet
- Tutorials 1-12: Tutorial Sheet 1Document11 pagesTutorials 1-12: Tutorial Sheet 1NarasimharaoNo ratings yet
- Essay Service UkDocument7 pagesEssay Service Ukb6zm3pxh100% (2)
- NURS FPX 6214 Assessment 4 Staff Training SessionDocument6 pagesNURS FPX 6214 Assessment 4 Staff Training SessionCarolyn HarkerNo ratings yet
- Quantstudio 5 Real-Time PCR System For Human IdentificationDocument2 pagesQuantstudio 5 Real-Time PCR System For Human IdentificationNiraj SilwalNo ratings yet
- Smart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedDocument7 pagesSmart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedfajarvicNo ratings yet
- GTP Strategic Plan Proposal PDFDocument227 pagesGTP Strategic Plan Proposal PDFPak Ngah LebayNo ratings yet
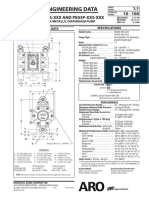
- Sales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1Document4 pagesSales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1jarosNo ratings yet
- The Sargent & Wallace Policy Ineffectiveness Proposition, Lucas CritiqueDocument8 pagesThe Sargent & Wallace Policy Ineffectiveness Proposition, Lucas CritiquehishamsaukNo ratings yet
- PAKEDMON Pendahuluan Telematika 2019 PDFDocument13 pagesPAKEDMON Pendahuluan Telematika 2019 PDFkhashina afiffNo ratings yet
- DT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFDocument62 pagesDT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFSabit ShaihollaNo ratings yet
- Flutter and Directional Stability of AircraftDocument12 pagesFlutter and Directional Stability of AircraftdaliadavidkNo ratings yet
- Cálculus - Areas and Tangents PDFDocument599 pagesCálculus - Areas and Tangents PDFCristhian Jhiovany PerezNo ratings yet
- CFM56Document5 pagesCFM56Anonymous wkL8YVBENo ratings yet
- Exploring Project Complexities and Their Problems A Critical Review of The Literature 01Document13 pagesExploring Project Complexities and Their Problems A Critical Review of The Literature 01ehsankhaliliNo ratings yet
- 2019 Recitation Chap 2 PDFDocument21 pages2019 Recitation Chap 2 PDFGull100% (1)
- Upgrading Substation Grounding SystemDocument30 pagesUpgrading Substation Grounding SystemWonbae ChoiNo ratings yet
- Trans-Amf Eng Man v44Document84 pagesTrans-Amf Eng Man v44AyeminThetNo ratings yet
- 1950 04 07 HistorySNDocument76 pages1950 04 07 HistorySNIgnacio TabuadaNo ratings yet
- Childhood TraumaDocument4 pagesChildhood TraumaMarvellous MunhuwaNo ratings yet
- Isolve Sata: Product Features and BenefitsDocument2 pagesIsolve Sata: Product Features and BenefitsShah DhavalNo ratings yet
- Courtney ResumeDocument2 pagesCourtney ResumeCourtney KabrelNo ratings yet
- Instalment Payment Plan FormDocument1 pageInstalment Payment Plan Formckeat_2No ratings yet
- Data Warehouse DefinitionDocument12 pagesData Warehouse DefinitionRoni StiawanNo ratings yet
- Assignent 4Document2 pagesAssignent 4Beshir Heyru Mohammed100% (1)
- Internship Report FormatDocument8 pagesInternship Report FormatThushar DNo ratings yet
- Commscope Andew VHLP2-80-XXXDocument5 pagesCommscope Andew VHLP2-80-XXXАлександр КNo ratings yet























































































Download as pdf or txt
You might also like
- Bids For Connection Quiz - GottmanDocument4 pagesBids For Connection Quiz - GottmanHollie123083% (6)
- CSE 474/574 Introduction To Machine Learning Fall 2011 Assignment 3Document3 pagesCSE 474/574 Introduction To Machine Learning Fall 2011 Assignment 3kwzeetNo ratings yet
- Case Study: Sanofi: Dispensing The Drug LordDocument8 pagesCase Study: Sanofi: Dispensing The Drug Lordpersephone hadesNo ratings yet
- 1487251639EE 2017 - Session 1 (Kreatryx Solutions)Document40 pages1487251639EE 2017 - Session 1 (Kreatryx Solutions)Utkarsh RajNo ratings yet
- CIE Publist 2011 FebruaryDocument11 pagesCIE Publist 2011 FebruaryMido AbdoNo ratings yet
- Mechanical Full Solution: GATE - 2017Document26 pagesMechanical Full Solution: GATE - 2017GIPPY SINGHNo ratings yet
- Alt ProjDocument9 pagesAlt ProjShy PeachDNo ratings yet
- 1 s2.0 S1474667016377849 MainDocument6 pages1 s2.0 S1474667016377849 Mainprachi singhNo ratings yet
- Klerk Et Al. - This Document Is Downloaded From DR-NTU, Nanyang Technological University Library, Singapore - 2008Document16 pagesKlerk Et Al. - This Document Is Downloaded From DR-NTU, Nanyang Technological University Library, Singapore - 2008xjohannNo ratings yet
- The Growth Model in Continuous Time (Ramsey Model) : Prof. Lutz HendricksDocument36 pagesThe Growth Model in Continuous Time (Ramsey Model) : Prof. Lutz HendricksAji SakaNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- BuckBoostExercise 435Document4 pagesBuckBoostExercise 435New CashNo ratings yet
- Simulation Power ElectronicDocument5 pagesSimulation Power Electronicchroeun sokayNo ratings yet
- Two-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For LinearDocument10 pagesTwo-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For Linearnaruse10No ratings yet
- EC 2008 With SolutionsDocument45 pagesEC 2008 With SolutionsBedadipta BainNo ratings yet
- Question Paper Code: X85762: Aeronautical EngineeringDocument3 pagesQuestion Paper Code: X85762: Aeronautical EngineeringSHANMUGARAJ MADASAMYNo ratings yet
- Answer: - (B) Explanation:-: Q. No. 1 - 25 Carry One Mark EachDocument22 pagesAnswer: - (B) Explanation:-: Q. No. 1 - 25 Carry One Mark EachTejas KumarNo ratings yet
- SD Lab ReportDocument10 pagesSD Lab ReportYuvraj TyagiNo ratings yet
- Potential Energy Approach (Rayleigh Ritz Method)Document16 pagesPotential Energy Approach (Rayleigh Ritz Method)Amit KashyapNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- 08 Differential Equations - Second Order LDE ApplicationsDocument25 pages08 Differential Equations - Second Order LDE ApplicationsRemo Rubian EvangelistaNo ratings yet
- APSPDCL-2012 SolutionsDocument11 pagesAPSPDCL-2012 SolutionsbhargaviNo ratings yet
- Pi and Pi-L Network EquationsDocument13 pagesPi and Pi-L Network Equationsdavid reyesNo ratings yet
- Stability 4Document15 pagesStability 4CaribNo ratings yet
- State Space Mimo PlantDocument4 pagesState Space Mimo PlantMalathy NNo ratings yet
- Macroeconomics 1 PS4 PDFDocument3 pagesMacroeconomics 1 PS4 PDFTaib MuffakNo ratings yet
- Line and Surface Integral-1Document39 pagesLine and Surface Integral-1kalimaster2653No ratings yet
- CONDUCTIONDocument19 pagesCONDUCTIONNwose Emmanuel N.No ratings yet
- Instrumentation & Measurement SystemsDocument7 pagesInstrumentation & Measurement SystemsAnkit KumarNo ratings yet
- BQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Document6 pagesBQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Marcos BenícioNo ratings yet
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- GATE EE 2005 With SolutionsDocument53 pagesGATE EE 2005 With SolutionsAbhishek Mohan50% (2)
- Equações Mecanicas Do MotoresDocument10 pagesEquações Mecanicas Do MotoresTiago FariaNo ratings yet
- EECE 5550 Mobile Robotics Lab #4: Due: Nov 21, 2022Document6 pagesEECE 5550 Mobile Robotics Lab #4: Due: Nov 21, 2022isic.mirjanaNo ratings yet
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDocument9 pagesChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqNo ratings yet
- GATE ECE 2006 Actual PaperDocument21 pagesGATE ECE 2006 Actual Paperkibrom atsbhaNo ratings yet
- Trans LinesDocument8 pagesTrans LinesariehashimieNo ratings yet
- Mid Sem 3Document11 pagesMid Sem 3BROJO CHAND GAYENNo ratings yet
- Source and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Document17 pagesSource and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Adarsh AnchiNo ratings yet
- ME-Paper Code-A GATE 2011: Answer: - (B) ExplanationDocument23 pagesME-Paper Code-A GATE 2011: Answer: - (B) ExplanationSuhas NatuNo ratings yet
- Transmission Line Write UpDocument10 pagesTransmission Line Write UpAbhishek AgrawalNo ratings yet
- Modelling of IM Using DQ TransformationDocument64 pagesModelling of IM Using DQ Transformationdivinelight100% (1)
- Pc-Ee 601Document36 pagesPc-Ee 601Koustav SahaNo ratings yet
- Department of Electrical Engineering Piemr, Indore: Experiment No: 01Document41 pagesDepartment of Electrical Engineering Piemr, Indore: Experiment No: 01Aayush PatidarNo ratings yet
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDocument10 pagesMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNo ratings yet
- FPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmDocument13 pagesFPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmGovind AtalNo ratings yet
- LINE INTEGRAL - Part 1Document25 pagesLINE INTEGRAL - Part 1Mohd Afiq AminNo ratings yet
- Design Based AssignmentDocument10 pagesDesign Based Assignmentnan.sayan30No ratings yet
- ECE710 Space Time Coding For Wireless CommunicationDocument10 pagesECE710 Space Time Coding For Wireless Communicationjivi sadirovNo ratings yet
- Pdfد.عيد أسئلة المرجعDocument59 pagesPdfد.عيد أسئلة المرجعMohamed ElkhtiarNo ratings yet
- Series de PuseuixDocument13 pagesSeries de PuseuixGabrielBenícioNo ratings yet
- T4 (8.3-10.5) sp17.tstDocument3 pagesT4 (8.3-10.5) sp17.tstjuanesz98No ratings yet
- Appendix A. The DQ TransformationDocument8 pagesAppendix A. The DQ TransformationtiagokjNo ratings yet
- One Dimensional Piston Problem: Tel: 631-5736 Email:atassi.1@nd - EduDocument4 pagesOne Dimensional Piston Problem: Tel: 631-5736 Email:atassi.1@nd - EdumohammadtariNo ratings yet
- ME GATE 2017 Set I Key SolutionDocument25 pagesME GATE 2017 Set I Key SolutionBeesam Ramesh KumarNo ratings yet
- 63ufrep 13.EC FullSyllabusPaper-II (Solutions)Document42 pages63ufrep 13.EC FullSyllabusPaper-II (Solutions)Saty Prakash YadavNo ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Pipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorDocument4 pagesPipelined CORDIC Design On FPGA For A Digital Sine and Cosine Waves GeneratorMohamed GanounNo ratings yet
- IEEE Power System Paper-Modeling and State Feedback Controller For Current Source Inverter Based STATCOMDocument6 pagesIEEE Power System Paper-Modeling and State Feedback Controller For Current Source Inverter Based STATCOMAnoop MathewNo ratings yet
- Assignment 3 Soln Electric ChargesDocument13 pagesAssignment 3 Soln Electric Chargeswarrior techNo ratings yet
- Gause Sei DalDocument5 pagesGause Sei DalMd Masud AlamNo ratings yet
- Tutorials 1-12: Tutorial Sheet 1Document11 pagesTutorials 1-12: Tutorial Sheet 1NarasimharaoNo ratings yet
- Essay Service UkDocument7 pagesEssay Service Ukb6zm3pxh100% (2)
- NURS FPX 6214 Assessment 4 Staff Training SessionDocument6 pagesNURS FPX 6214 Assessment 4 Staff Training SessionCarolyn HarkerNo ratings yet
- Quantstudio 5 Real-Time PCR System For Human IdentificationDocument2 pagesQuantstudio 5 Real-Time PCR System For Human IdentificationNiraj SilwalNo ratings yet
- Smart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedDocument7 pagesSmart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedfajarvicNo ratings yet
- GTP Strategic Plan Proposal PDFDocument227 pagesGTP Strategic Plan Proposal PDFPak Ngah LebayNo ratings yet
- Sales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1Document4 pagesSales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1jarosNo ratings yet
- The Sargent & Wallace Policy Ineffectiveness Proposition, Lucas CritiqueDocument8 pagesThe Sargent & Wallace Policy Ineffectiveness Proposition, Lucas CritiquehishamsaukNo ratings yet
- PAKEDMON Pendahuluan Telematika 2019 PDFDocument13 pagesPAKEDMON Pendahuluan Telematika 2019 PDFkhashina afiffNo ratings yet
- DT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFDocument62 pagesDT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFSabit ShaihollaNo ratings yet
- Flutter and Directional Stability of AircraftDocument12 pagesFlutter and Directional Stability of AircraftdaliadavidkNo ratings yet
- Cálculus - Areas and Tangents PDFDocument599 pagesCálculus - Areas and Tangents PDFCristhian Jhiovany PerezNo ratings yet
- CFM56Document5 pagesCFM56Anonymous wkL8YVBENo ratings yet
- Exploring Project Complexities and Their Problems A Critical Review of The Literature 01Document13 pagesExploring Project Complexities and Their Problems A Critical Review of The Literature 01ehsankhaliliNo ratings yet
- 2019 Recitation Chap 2 PDFDocument21 pages2019 Recitation Chap 2 PDFGull100% (1)
- Upgrading Substation Grounding SystemDocument30 pagesUpgrading Substation Grounding SystemWonbae ChoiNo ratings yet
- Trans-Amf Eng Man v44Document84 pagesTrans-Amf Eng Man v44AyeminThetNo ratings yet
- 1950 04 07 HistorySNDocument76 pages1950 04 07 HistorySNIgnacio TabuadaNo ratings yet
- Childhood TraumaDocument4 pagesChildhood TraumaMarvellous MunhuwaNo ratings yet
- Isolve Sata: Product Features and BenefitsDocument2 pagesIsolve Sata: Product Features and BenefitsShah DhavalNo ratings yet
- Courtney ResumeDocument2 pagesCourtney ResumeCourtney KabrelNo ratings yet
- Instalment Payment Plan FormDocument1 pageInstalment Payment Plan Formckeat_2No ratings yet
- Data Warehouse DefinitionDocument12 pagesData Warehouse DefinitionRoni StiawanNo ratings yet
- Assignent 4Document2 pagesAssignent 4Beshir Heyru Mohammed100% (1)
- Internship Report FormatDocument8 pagesInternship Report FormatThushar DNo ratings yet
- Commscope Andew VHLP2-80-XXXDocument5 pagesCommscope Andew VHLP2-80-XXXАлександр КNo ratings yet