
Analysis of Statically Determinate Structures: Idealized Structure
Analysis of Statically Determinate Structures: Idealized Structure
You might also like
- Data-Sheet Drum Brake RT - 200220 - enDocument1 pageData-Sheet Drum Brake RT - 200220 - enRFTNo ratings yet
- BC Science 9 Chemistry Unit Study GuideDocument2 pagesBC Science 9 Chemistry Unit Study Guideerinyth100% (2)
- Bolted Beam Column ConnectionsDocument16 pagesBolted Beam Column Connectionssgopalkn7559100% (1)
- Joints in Steel Structures Based On Eurocode 3Document17 pagesJoints in Steel Structures Based On Eurocode 3uhu_plus6482No ratings yet
- Bolted JointsDocument13 pagesBolted JointsGirish ChandranNo ratings yet
- Finite Element Analysis and Tests On Bolted End-Plate by Shi 2004Document12 pagesFinite Element Analysis and Tests On Bolted End-Plate by Shi 2004fahmi aballiNo ratings yet
- Chapter 39Document23 pagesChapter 39Ouseppachan AmbookenNo ratings yet
- Ucture: of Practice FailureDocument20 pagesUcture: of Practice FailureKosygin LeishangthemNo ratings yet
- O4C.3 HeDocument14 pagesO4C.3 HeFrancesco SartiNo ratings yet
- Bolted Connections (Prying Force)Document16 pagesBolted Connections (Prying Force)Ivan Hadzi BoskovicNo ratings yet
- Hot Rolled Steel ConnectionsDocument16 pagesHot Rolled Steel ConnectionsakhileshgojeNo ratings yet
- c2Document39 pagesc2Patrik GăiceanNo ratings yet
- 2859 10660 1 PBDocument16 pages2859 10660 1 PBlaich_mustaNo ratings yet
- Bolted Beam Column ConnectionsDocument16 pagesBolted Beam Column Connectionslael00No ratings yet
- Bantog - Finals HW 1Document4 pagesBantog - Finals HW 1Penuel G. BantogNo ratings yet
- Wcee2012 5803 PDFDocument6 pagesWcee2012 5803 PDFArief_Rahman_JaitNo ratings yet
- Comparative Analysis of Steel Reinforced and BamboDocument5 pagesComparative Analysis of Steel Reinforced and BamboElla LopezNo ratings yet
- A Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoDocument26 pagesA Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoAmine OsmaniNo ratings yet
- 0035 - Joint Stiffness and Its Influence On Design of Steel Structural Elements en 3Document5 pages0035 - Joint Stiffness and Its Influence On Design of Steel Structural Elements en 3Aung ThantNo ratings yet
- Bar Pullout Tests and Seismic Tests of Small-Headed Barsin Beam-Column JointsDocument11 pagesBar Pullout Tests and Seismic Tests of Small-Headed Barsin Beam-Column JointsProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNo ratings yet
- RSID2008-Lapuz Etal-RevDocument6 pagesRSID2008-Lapuz Etal-RevAndy OretaNo ratings yet
- Composite and Steel Construction Compendium. Part 8: Bolted Steel ConnectionsDocument4 pagesComposite and Steel Construction Compendium. Part 8: Bolted Steel Connectionsalberto5791No ratings yet
- AISC Effect of Compound Buckling On Compression Strength of Built-Up MembersDocument8 pagesAISC Effect of Compound Buckling On Compression Strength of Built-Up Memberssebastian9033No ratings yet
- Chapter 3Document34 pagesChapter 3Sharul ShaNo ratings yet
- Duane Tal 2002Document9 pagesDuane Tal 2002aref akelNo ratings yet
- Ch12 BracingDocument25 pagesCh12 BracingErnie ErnieNo ratings yet
- Beam - Column Joint EC2Document11 pagesBeam - Column Joint EC2undf25No ratings yet
- 15783-Article Text-58382-3-10-20220114Document12 pages15783-Article Text-58382-3-10-20220114JOHN CECIL BARBOSANo ratings yet
- Effect of Compound Buckling On Compression Strength of Built-Up MembersDocument9 pagesEffect of Compound Buckling On Compression Strength of Built-Up MembersFishatsion AsgelelewNo ratings yet
- Chapter 29Document14 pagesChapter 29ADS sNo ratings yet
- 11304-Article Text PDF-33210-2-10-20180322Document16 pages11304-Article Text PDF-33210-2-10-20180322Abdollah AlkhatabNo ratings yet
- Conexiones de AceroDocument8 pagesConexiones de AceroRenzo Xavier Chavez HurtadoNo ratings yet
- Chapter 7Document29 pagesChapter 7Victoria Jung100% (3)
- Confinementreinforcement RCcolumns ICJAug2011 PDFDocument10 pagesConfinementreinforcement RCcolumns ICJAug2011 PDFSamuel megersaNo ratings yet
- Confinementreinforcement RCcolumns ICJAug2011Document10 pagesConfinementreinforcement RCcolumns ICJAug2011joshuaNo ratings yet
- 1 s2.0 S0141029698000522 Main She PDFDocument17 pages1 s2.0 S0141029698000522 Main She PDFMarimuthu KaliyamoorthyNo ratings yet
- Lecture 10 (B) - DR S K Garg On Ductile Detailing of Steel BridgesDocument20 pagesLecture 10 (B) - DR S K Garg On Ductile Detailing of Steel BridgesSulabh GuptaNo ratings yet
- Composite and Steel Construction CompendiumDocument3 pagesComposite and Steel Construction CompendiumΤε ΧνηNo ratings yet
- Chapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction ManualDocument5 pagesChapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction Manualedn_mj1645No ratings yet
- CEE 241 Notes IV PDFDocument93 pagesCEE 241 Notes IV PDFNguyen DuyNo ratings yet
- Contact Problems and StressDocument13 pagesContact Problems and Stressdf_campos3353No ratings yet
- Materials 12 02958Document20 pagesMaterials 12 02958Bikila MalasaNo ratings yet
- Chapter 34Document9 pagesChapter 34Joey JohnsonNo ratings yet
- Hwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFDocument14 pagesHwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFEduardo MarquesNo ratings yet
- Mechanics of Materials Chap 2-IDocument51 pagesMechanics of Materials Chap 2-I彭莉棋No ratings yet
- Seismic Performance of Concrete-Filled Steel Tubular (CFST) StructuresDocument8 pagesSeismic Performance of Concrete-Filled Steel Tubular (CFST) StructuresPatel TosifNo ratings yet
- Ijaret 09 02 008Document10 pagesIjaret 09 02 008Rajesh Kumar PaulNo ratings yet
- PBRB Studiu NumericDocument9 pagesPBRB Studiu NumericmocanuNo ratings yet
- COPRA Anchoring Coupler: For Bolted ConnectionsDocument24 pagesCOPRA Anchoring Coupler: For Bolted ConnectionsKusuma Indra KlanaNo ratings yet
- 07 QUTStudentConnectionDocument26 pages07 QUTStudentConnectionThaiNguyenNo ratings yet
- Bond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingDocument11 pagesBond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingMarimuthu KaliyamoorthyNo ratings yet
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Some Mooted Questions in Reinforced Concrete Design American Society of Civil Engineers, Transactions, Paper No. 1169, Volume LXX, Dec. 1910From EverandSome Mooted Questions in Reinforced Concrete Design American Society of Civil Engineers, Transactions, Paper No. 1169, Volume LXX, Dec. 1910No ratings yet
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsFrom EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo ratings yet
- A Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsFrom EverandA Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsNo ratings yet
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- An Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsFrom EverandAn Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- 1.1 Loads, Load Factors, and Load Combinations For LRFDDocument9 pages1.1 Loads, Load Factors, and Load Combinations For LRFDعبدالله عبدالحكيم عامرNo ratings yet
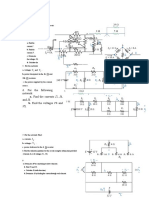
- For The Following Network and I8.: A. Find The Currents I2, I6, B. Find The Voltages V4 andDocument2 pagesFor The Following Network and I8.: A. Find The Currents I2, I6, B. Find The Voltages V4 andعبدالله عبدالحكيم عامرNo ratings yet
- Fluid Mechanics Class 2: Thursday, January 13Document5 pagesFluid Mechanics Class 2: Thursday, January 13عبدالله عبدالحكيم عامرNo ratings yet
- The Exam Is Closed Book and Closed Notes.: (Assume Kinetic Energy Correction Factor Is 1)Document6 pagesThe Exam Is Closed Book and Closed Notes.: (Assume Kinetic Energy Correction Factor Is 1)عبدالله عبدالحكيم عامرNo ratings yet
- CE323 Structural Analysis I: N/M N/M NDocument2 pagesCE323 Structural Analysis I: N/M N/M Nعبدالله عبدالحكيم عامرNo ratings yet
- Handout 2Document31 pagesHandout 2عبدالله عبدالحكيم عامرNo ratings yet
- Method of Virtual Work: Beams and Frames: CauseDocument8 pagesMethod of Virtual Work: Beams and Frames: Causeعبدالله عبدالحكيم عامرNo ratings yet
- Arches: Funicular Arch Because No Bending or Shear Forces Occur Within The ArchDocument4 pagesArches: Funicular Arch Because No Bending or Shear Forces Occur Within The Archعبدالله عبدالحكيم عامرNo ratings yet
- FLuid 535Document11 pagesFLuid 535عبدالله عبدالحكيم عامرNo ratings yet
- Experiment (1) Determination of Center of Pressure of A Fluid On Partially or Fully Submerged Plane SurfaceDocument11 pagesExperiment (1) Determination of Center of Pressure of A Fluid On Partially or Fully Submerged Plane Surfaceعبدالله عبدالحكيم عامرNo ratings yet
- Polymer: Berkant Yetiskin, Oguz OkayDocument10 pagesPolymer: Berkant Yetiskin, Oguz OkayKhaled Al GhaebNo ratings yet
- Design and Implementation of Microstrip Patch Antenna ArrayDocument4 pagesDesign and Implementation of Microstrip Patch Antenna ArrayPriscilaNo ratings yet
- SAMPLE PROBLEMS Fluid Mechanics Pump DeNeversDocument2 pagesSAMPLE PROBLEMS Fluid Mechanics Pump DeNeversGeorge Isaac McQuilesNo ratings yet
- VCB PM PDFDocument15 pagesVCB PM PDFAccidental EngineerNo ratings yet
- Rheem Storage Hot Water UnitDocument3 pagesRheem Storage Hot Water UnitMahfuz RahmanNo ratings yet
- Transition Metal Joints For Steam GeneratorsDocument15 pagesTransition Metal Joints For Steam GeneratorsMahsaNo ratings yet
- Finite Element Analysis of Metal Matrix Composite MaterialsDocument10 pagesFinite Element Analysis of Metal Matrix Composite MaterialssnvijayanNo ratings yet
- CFD - NotepadDocument1 pageCFD - NotepadLalith KumarNo ratings yet
- IB Test Review Trig With Calculator MSDocument15 pagesIB Test Review Trig With Calculator MSGa-Eun YooNo ratings yet
- Final Yield LineDocument21 pagesFinal Yield LineKartikMandaniNo ratings yet
- Sample Paper Physics Class XiDocument6 pagesSample Paper Physics Class XiBhaskar JhaNo ratings yet
- GFRP RC - Courseall 08102020xDocument371 pagesGFRP RC - Courseall 08102020xjpantazis1975No ratings yet
- Estimate For Providing Electrification of A.J.K. Thana Bulding Block & Distt-MungeliDocument10 pagesEstimate For Providing Electrification of A.J.K. Thana Bulding Block & Distt-MungeliMahendra panditNo ratings yet
- ERICO Seismic Sway Bracing SeminarDocument129 pagesERICO Seismic Sway Bracing Seminarmas zak danielNo ratings yet
- CONTITECH MultiribDocument68 pagesCONTITECH MultiribarieprachmanNo ratings yet
- Ijert Ijert: Structural Analysis of A Multi-Storeyed Building Using ETABS For Different Plan ConfigurationsDocument5 pagesIjert Ijert: Structural Analysis of A Multi-Storeyed Building Using ETABS For Different Plan ConfigurationsPachaKhanKhogyaniNo ratings yet
- User Manual Autoclave Ha-Bav150Document21 pagesUser Manual Autoclave Ha-Bav150TerraTerro Welleh WellehNo ratings yet
- Hydac Mobile Filter Systems1Document76 pagesHydac Mobile Filter Systems1bee1406763181No ratings yet
- IPT ReviewDocument17 pagesIPT ReviewShivaji deshmukhNo ratings yet
- JIS G3106-SM400 - SM490 - SM520 - SM570 Structural Steel PlateDocument7 pagesJIS G3106-SM400 - SM490 - SM520 - SM570 Structural Steel PlateAbhishek BhargavNo ratings yet
- Surface Coating Surface Welding and Spray and Fuse Powders 2609hogDocument24 pagesSurface Coating Surface Welding and Spray and Fuse Powders 2609hogmatiastello37No ratings yet
- Textbook Computational Finite Element Methods in Nanotechnology Sarhan M Musaeditor Ebook All Chapter PDFDocument53 pagesTextbook Computational Finite Element Methods in Nanotechnology Sarhan M Musaeditor Ebook All Chapter PDFchristina.young492100% (14)
- Physics Lab:Coefficient of Linear ExpansionDocument3 pagesPhysics Lab:Coefficient of Linear ExpansionNatalie Sherwood100% (1)
- Bioinorganic MCQsDocument3 pagesBioinorganic MCQsaniruddha_mukherjiNo ratings yet
- Desalination: Shaheen Fatima Anis, Boor Singh Lalia, Raed HashaikehDocument8 pagesDesalination: Shaheen Fatima Anis, Boor Singh Lalia, Raed HashaikehSK SahooNo ratings yet
- Potential of Sintered Friction Linings in Synchronizers - enDocument15 pagesPotential of Sintered Friction Linings in Synchronizers - enPedro Ivo Meirinho GalvãoNo ratings yet
- Unit 1 - Physics - WWW - Rgpvnotes.inDocument15 pagesUnit 1 - Physics - WWW - Rgpvnotes.inMayank SharmaNo ratings yet
- Fluid Mechanics With Engineering Applications by Franzini 10th. EditionDocument621 pagesFluid Mechanics With Engineering Applications by Franzini 10th. EditionJohn KuehlmanNo ratings yet


































































































Download as pdf or txt
You might also like
- Data-Sheet Drum Brake RT - 200220 - enDocument1 pageData-Sheet Drum Brake RT - 200220 - enRFTNo ratings yet
- BC Science 9 Chemistry Unit Study GuideDocument2 pagesBC Science 9 Chemistry Unit Study Guideerinyth100% (2)
- Bolted Beam Column ConnectionsDocument16 pagesBolted Beam Column Connectionssgopalkn7559100% (1)
- Joints in Steel Structures Based On Eurocode 3Document17 pagesJoints in Steel Structures Based On Eurocode 3uhu_plus6482No ratings yet
- Bolted JointsDocument13 pagesBolted JointsGirish ChandranNo ratings yet
- Finite Element Analysis and Tests On Bolted End-Plate by Shi 2004Document12 pagesFinite Element Analysis and Tests On Bolted End-Plate by Shi 2004fahmi aballiNo ratings yet
- Chapter 39Document23 pagesChapter 39Ouseppachan AmbookenNo ratings yet
- Ucture: of Practice FailureDocument20 pagesUcture: of Practice FailureKosygin LeishangthemNo ratings yet
- O4C.3 HeDocument14 pagesO4C.3 HeFrancesco SartiNo ratings yet
- Bolted Connections (Prying Force)Document16 pagesBolted Connections (Prying Force)Ivan Hadzi BoskovicNo ratings yet
- Hot Rolled Steel ConnectionsDocument16 pagesHot Rolled Steel ConnectionsakhileshgojeNo ratings yet
- c2Document39 pagesc2Patrik GăiceanNo ratings yet
- 2859 10660 1 PBDocument16 pages2859 10660 1 PBlaich_mustaNo ratings yet
- Bolted Beam Column ConnectionsDocument16 pagesBolted Beam Column Connectionslael00No ratings yet
- Bantog - Finals HW 1Document4 pagesBantog - Finals HW 1Penuel G. BantogNo ratings yet
- Wcee2012 5803 PDFDocument6 pagesWcee2012 5803 PDFArief_Rahman_JaitNo ratings yet
- Comparative Analysis of Steel Reinforced and BamboDocument5 pagesComparative Analysis of Steel Reinforced and BamboElla LopezNo ratings yet
- A Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoDocument26 pagesA Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoAmine OsmaniNo ratings yet
- 0035 - Joint Stiffness and Its Influence On Design of Steel Structural Elements en 3Document5 pages0035 - Joint Stiffness and Its Influence On Design of Steel Structural Elements en 3Aung ThantNo ratings yet
- Bar Pullout Tests and Seismic Tests of Small-Headed Barsin Beam-Column JointsDocument11 pagesBar Pullout Tests and Seismic Tests of Small-Headed Barsin Beam-Column JointsProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNo ratings yet
- RSID2008-Lapuz Etal-RevDocument6 pagesRSID2008-Lapuz Etal-RevAndy OretaNo ratings yet
- Composite and Steel Construction Compendium. Part 8: Bolted Steel ConnectionsDocument4 pagesComposite and Steel Construction Compendium. Part 8: Bolted Steel Connectionsalberto5791No ratings yet
- AISC Effect of Compound Buckling On Compression Strength of Built-Up MembersDocument8 pagesAISC Effect of Compound Buckling On Compression Strength of Built-Up Memberssebastian9033No ratings yet
- Chapter 3Document34 pagesChapter 3Sharul ShaNo ratings yet
- Duane Tal 2002Document9 pagesDuane Tal 2002aref akelNo ratings yet
- Ch12 BracingDocument25 pagesCh12 BracingErnie ErnieNo ratings yet
- Beam - Column Joint EC2Document11 pagesBeam - Column Joint EC2undf25No ratings yet
- 15783-Article Text-58382-3-10-20220114Document12 pages15783-Article Text-58382-3-10-20220114JOHN CECIL BARBOSANo ratings yet
- Effect of Compound Buckling On Compression Strength of Built-Up MembersDocument9 pagesEffect of Compound Buckling On Compression Strength of Built-Up MembersFishatsion AsgelelewNo ratings yet
- Chapter 29Document14 pagesChapter 29ADS sNo ratings yet
- 11304-Article Text PDF-33210-2-10-20180322Document16 pages11304-Article Text PDF-33210-2-10-20180322Abdollah AlkhatabNo ratings yet
- Conexiones de AceroDocument8 pagesConexiones de AceroRenzo Xavier Chavez HurtadoNo ratings yet
- Chapter 7Document29 pagesChapter 7Victoria Jung100% (3)
- Confinementreinforcement RCcolumns ICJAug2011 PDFDocument10 pagesConfinementreinforcement RCcolumns ICJAug2011 PDFSamuel megersaNo ratings yet
- Confinementreinforcement RCcolumns ICJAug2011Document10 pagesConfinementreinforcement RCcolumns ICJAug2011joshuaNo ratings yet
- 1 s2.0 S0141029698000522 Main She PDFDocument17 pages1 s2.0 S0141029698000522 Main She PDFMarimuthu KaliyamoorthyNo ratings yet
- Lecture 10 (B) - DR S K Garg On Ductile Detailing of Steel BridgesDocument20 pagesLecture 10 (B) - DR S K Garg On Ductile Detailing of Steel BridgesSulabh GuptaNo ratings yet
- Composite and Steel Construction CompendiumDocument3 pagesComposite and Steel Construction CompendiumΤε ΧνηNo ratings yet
- Chapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction ManualDocument5 pagesChapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction Manualedn_mj1645No ratings yet
- CEE 241 Notes IV PDFDocument93 pagesCEE 241 Notes IV PDFNguyen DuyNo ratings yet
- Contact Problems and StressDocument13 pagesContact Problems and Stressdf_campos3353No ratings yet
- Materials 12 02958Document20 pagesMaterials 12 02958Bikila MalasaNo ratings yet
- Chapter 34Document9 pagesChapter 34Joey JohnsonNo ratings yet
- Hwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFDocument14 pagesHwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFEduardo MarquesNo ratings yet
- Mechanics of Materials Chap 2-IDocument51 pagesMechanics of Materials Chap 2-I彭莉棋No ratings yet
- Seismic Performance of Concrete-Filled Steel Tubular (CFST) StructuresDocument8 pagesSeismic Performance of Concrete-Filled Steel Tubular (CFST) StructuresPatel TosifNo ratings yet
- Ijaret 09 02 008Document10 pagesIjaret 09 02 008Rajesh Kumar PaulNo ratings yet
- PBRB Studiu NumericDocument9 pagesPBRB Studiu NumericmocanuNo ratings yet
- COPRA Anchoring Coupler: For Bolted ConnectionsDocument24 pagesCOPRA Anchoring Coupler: For Bolted ConnectionsKusuma Indra KlanaNo ratings yet
- 07 QUTStudentConnectionDocument26 pages07 QUTStudentConnectionThaiNguyenNo ratings yet
- Bond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingDocument11 pagesBond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingMarimuthu KaliyamoorthyNo ratings yet
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Some Mooted Questions in Reinforced Concrete Design American Society of Civil Engineers, Transactions, Paper No. 1169, Volume LXX, Dec. 1910From EverandSome Mooted Questions in Reinforced Concrete Design American Society of Civil Engineers, Transactions, Paper No. 1169, Volume LXX, Dec. 1910No ratings yet
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsFrom EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo ratings yet
- A Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsFrom EverandA Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsNo ratings yet
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- An Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsFrom EverandAn Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- 1.1 Loads, Load Factors, and Load Combinations For LRFDDocument9 pages1.1 Loads, Load Factors, and Load Combinations For LRFDعبدالله عبدالحكيم عامرNo ratings yet
- For The Following Network and I8.: A. Find The Currents I2, I6, B. Find The Voltages V4 andDocument2 pagesFor The Following Network and I8.: A. Find The Currents I2, I6, B. Find The Voltages V4 andعبدالله عبدالحكيم عامرNo ratings yet
- Fluid Mechanics Class 2: Thursday, January 13Document5 pagesFluid Mechanics Class 2: Thursday, January 13عبدالله عبدالحكيم عامرNo ratings yet
- The Exam Is Closed Book and Closed Notes.: (Assume Kinetic Energy Correction Factor Is 1)Document6 pagesThe Exam Is Closed Book and Closed Notes.: (Assume Kinetic Energy Correction Factor Is 1)عبدالله عبدالحكيم عامرNo ratings yet
- CE323 Structural Analysis I: N/M N/M NDocument2 pagesCE323 Structural Analysis I: N/M N/M Nعبدالله عبدالحكيم عامرNo ratings yet
- Handout 2Document31 pagesHandout 2عبدالله عبدالحكيم عامرNo ratings yet
- Method of Virtual Work: Beams and Frames: CauseDocument8 pagesMethod of Virtual Work: Beams and Frames: Causeعبدالله عبدالحكيم عامرNo ratings yet
- Arches: Funicular Arch Because No Bending or Shear Forces Occur Within The ArchDocument4 pagesArches: Funicular Arch Because No Bending or Shear Forces Occur Within The Archعبدالله عبدالحكيم عامرNo ratings yet
- FLuid 535Document11 pagesFLuid 535عبدالله عبدالحكيم عامرNo ratings yet
- Experiment (1) Determination of Center of Pressure of A Fluid On Partially or Fully Submerged Plane SurfaceDocument11 pagesExperiment (1) Determination of Center of Pressure of A Fluid On Partially or Fully Submerged Plane Surfaceعبدالله عبدالحكيم عامرNo ratings yet
- Polymer: Berkant Yetiskin, Oguz OkayDocument10 pagesPolymer: Berkant Yetiskin, Oguz OkayKhaled Al GhaebNo ratings yet
- Design and Implementation of Microstrip Patch Antenna ArrayDocument4 pagesDesign and Implementation of Microstrip Patch Antenna ArrayPriscilaNo ratings yet
- SAMPLE PROBLEMS Fluid Mechanics Pump DeNeversDocument2 pagesSAMPLE PROBLEMS Fluid Mechanics Pump DeNeversGeorge Isaac McQuilesNo ratings yet
- VCB PM PDFDocument15 pagesVCB PM PDFAccidental EngineerNo ratings yet
- Rheem Storage Hot Water UnitDocument3 pagesRheem Storage Hot Water UnitMahfuz RahmanNo ratings yet
- Transition Metal Joints For Steam GeneratorsDocument15 pagesTransition Metal Joints For Steam GeneratorsMahsaNo ratings yet
- Finite Element Analysis of Metal Matrix Composite MaterialsDocument10 pagesFinite Element Analysis of Metal Matrix Composite MaterialssnvijayanNo ratings yet
- CFD - NotepadDocument1 pageCFD - NotepadLalith KumarNo ratings yet
- IB Test Review Trig With Calculator MSDocument15 pagesIB Test Review Trig With Calculator MSGa-Eun YooNo ratings yet
- Final Yield LineDocument21 pagesFinal Yield LineKartikMandaniNo ratings yet
- Sample Paper Physics Class XiDocument6 pagesSample Paper Physics Class XiBhaskar JhaNo ratings yet
- GFRP RC - Courseall 08102020xDocument371 pagesGFRP RC - Courseall 08102020xjpantazis1975No ratings yet
- Estimate For Providing Electrification of A.J.K. Thana Bulding Block & Distt-MungeliDocument10 pagesEstimate For Providing Electrification of A.J.K. Thana Bulding Block & Distt-MungeliMahendra panditNo ratings yet
- ERICO Seismic Sway Bracing SeminarDocument129 pagesERICO Seismic Sway Bracing Seminarmas zak danielNo ratings yet
- CONTITECH MultiribDocument68 pagesCONTITECH MultiribarieprachmanNo ratings yet
- Ijert Ijert: Structural Analysis of A Multi-Storeyed Building Using ETABS For Different Plan ConfigurationsDocument5 pagesIjert Ijert: Structural Analysis of A Multi-Storeyed Building Using ETABS For Different Plan ConfigurationsPachaKhanKhogyaniNo ratings yet
- User Manual Autoclave Ha-Bav150Document21 pagesUser Manual Autoclave Ha-Bav150TerraTerro Welleh WellehNo ratings yet
- Hydac Mobile Filter Systems1Document76 pagesHydac Mobile Filter Systems1bee1406763181No ratings yet
- IPT ReviewDocument17 pagesIPT ReviewShivaji deshmukhNo ratings yet
- JIS G3106-SM400 - SM490 - SM520 - SM570 Structural Steel PlateDocument7 pagesJIS G3106-SM400 - SM490 - SM520 - SM570 Structural Steel PlateAbhishek BhargavNo ratings yet
- Surface Coating Surface Welding and Spray and Fuse Powders 2609hogDocument24 pagesSurface Coating Surface Welding and Spray and Fuse Powders 2609hogmatiastello37No ratings yet
- Textbook Computational Finite Element Methods in Nanotechnology Sarhan M Musaeditor Ebook All Chapter PDFDocument53 pagesTextbook Computational Finite Element Methods in Nanotechnology Sarhan M Musaeditor Ebook All Chapter PDFchristina.young492100% (14)
- Physics Lab:Coefficient of Linear ExpansionDocument3 pagesPhysics Lab:Coefficient of Linear ExpansionNatalie Sherwood100% (1)
- Bioinorganic MCQsDocument3 pagesBioinorganic MCQsaniruddha_mukherjiNo ratings yet
- Desalination: Shaheen Fatima Anis, Boor Singh Lalia, Raed HashaikehDocument8 pagesDesalination: Shaheen Fatima Anis, Boor Singh Lalia, Raed HashaikehSK SahooNo ratings yet
- Potential of Sintered Friction Linings in Synchronizers - enDocument15 pagesPotential of Sintered Friction Linings in Synchronizers - enPedro Ivo Meirinho GalvãoNo ratings yet
- Unit 1 - Physics - WWW - Rgpvnotes.inDocument15 pagesUnit 1 - Physics - WWW - Rgpvnotes.inMayank SharmaNo ratings yet
- Fluid Mechanics With Engineering Applications by Franzini 10th. EditionDocument621 pagesFluid Mechanics With Engineering Applications by Franzini 10th. EditionJohn KuehlmanNo ratings yet