Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 1 Calculul Parametrilor PM U PDFDocument11 pages1 Calculul Parametrilor PM U PDFAnonymous vJbt0ARNo ratings yet
- Progress in Electromagnetics Research M, Vol. 8, 163-180, 2009Document18 pagesProgress in Electromagnetics Research M, Vol. 8, 163-180, 2009Carlos NúñezNo ratings yet
- Rotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDocument6 pagesRotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDr. Aslan JalalNo ratings yet
- KIEE 2010 Magnetic Sensor Design For Linear MachineDocument2 pagesKIEE 2010 Magnetic Sensor Design For Linear MachineKi ChunNo ratings yet
- ISEF - 2015 - Modeling of DESM Using Nodal Based Generalized EMCDocument8 pagesISEF - 2015 - Modeling of DESM Using Nodal Based Generalized EMCKi ChunNo ratings yet
- Energies 11 03053 v2Document14 pagesEnergies 11 03053 v2BENI PURNOMONo ratings yet
- Modeling and Design of Axial Flux PermanDocument7 pagesModeling and Design of Axial Flux PermanHailin HuangNo ratings yet
- 001 Bien KowskiDocument5 pages001 Bien KowskikarnatisharathNo ratings yet
- Parametric Study of Rotor Slot Shape On A Cage Induction MotorDocument0 pagesParametric Study of Rotor Slot Shape On A Cage Induction MotorvishiwizardNo ratings yet
- Development of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Document10 pagesDevelopment of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Nilton Ramos EstebanNo ratings yet
- Analytical Design Method Vs FEADocument24 pagesAnalytical Design Method Vs FEANANDHAKUMAR ANo ratings yet
- Study On Unbalance Magnetic Pull of The Motorized Spindle Under Different Rotor EccentricitiesDocument5 pagesStudy On Unbalance Magnetic Pull of The Motorized Spindle Under Different Rotor EccentricitiesDiego RamosNo ratings yet
- Finite-Element Models For Electrical Machines by HennebergerDocument12 pagesFinite-Element Models For Electrical Machines by HennebergermuhassadiNo ratings yet
- Stator Tooth On Cogging TorqueDocument8 pagesStator Tooth On Cogging TorqueHoang Hoang LeNo ratings yet
- Optimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFDocument6 pagesOptimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFrakeshee2007No ratings yet
- Design and Modelling of BLDC Motor For ADocument7 pagesDesign and Modelling of BLDC Motor For AShubhzsNo ratings yet
- Modeling and Analysis of Cage Induction Motors Under Rotor Misalignment and Air Gap EccentricityDocument5 pagesModeling and Analysis of Cage Induction Motors Under Rotor Misalignment and Air Gap EccentricityMilutinNo ratings yet
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocument4 pagesAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNo ratings yet
- Optimal Design of Interior Permanent Magnet - Lee - 2013Document6 pagesOptimal Design of Interior Permanent Magnet - Lee - 2013Maycon MaranNo ratings yet
- Transformer Joints FE Analysis Using Pseudo-Source TechniqueDocument4 pagesTransformer Joints FE Analysis Using Pseudo-Source TechniqueRavi RajNo ratings yet
- A Design Method For Cage Induction Motors With Non-Skewed Rotor BarsDocument2 pagesA Design Method For Cage Induction Motors With Non-Skewed Rotor BarsLava KumarNo ratings yet
- Ijeev5n7 03Document10 pagesIjeev5n7 03nevesunipampaNo ratings yet
- Pebn009 Sizing of Electrical Machines PDFDocument2 pagesPebn009 Sizing of Electrical Machines PDFvishiwizardNo ratings yet
- Applied ElectromagneticsDocument269 pagesApplied ElectromagneticsNur Amiera SyuhadhaNo ratings yet
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 pagesNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliNo ratings yet
- Analytical Method For The Design of A Machine With Aligned and Skewed Permanent MagnetsDocument8 pagesAnalytical Method For The Design of A Machine With Aligned and Skewed Permanent MagnetsAmit sahaNo ratings yet
- Developing A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineDocument6 pagesDeveloping A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineaugustoNo ratings yet
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்No ratings yet
- 10 - UkaniszynDocument11 pages10 - UkaniszynLavanya ChandranNo ratings yet
- Induction Motor Design Methodology BasedDocument8 pagesInduction Motor Design Methodology BasedAli HashemiNo ratings yet
- Magnetostrictive MaterialDocument4 pagesMagnetostrictive MaterialTung VanNo ratings yet
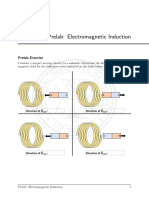
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- Design and Analysis of Switched Reluctance Motors: Ibrahim SENGOR, Abdullah POLAT and Lale T. ERGENEDocument5 pagesDesign and Analysis of Switched Reluctance Motors: Ibrahim SENGOR, Abdullah POLAT and Lale T. ERGENESandesh BhakthaNo ratings yet
- Vansompel 2011Document6 pagesVansompel 2011Will TedjoNo ratings yet
- Calculation of Cogging Force in Permanent Magnet Linear Motor Using Analytical and Finite Element MethodsDocument6 pagesCalculation of Cogging Force in Permanent Magnet Linear Motor Using Analytical and Finite Element MethodsYanartas Le GinNo ratings yet
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 pagesDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarNo ratings yet
- Design of Internal Permanent Magnet Brushless DC Motor Using AnsysDocument7 pagesDesign of Internal Permanent Magnet Brushless DC Motor Using Ansysviet anh nguyenNo ratings yet
- Design Rotor V-Shape Permanent Magnets-GoodDocument4 pagesDesign Rotor V-Shape Permanent Magnets-Goodhpham2005No ratings yet
- Dynamic Simulation of Switched Reluctance Motor Using MatlabDocument5 pagesDynamic Simulation of Switched Reluctance Motor Using MatlabachyuachyuthanNo ratings yet
- Design Optimization of CMOS-MEMS Staggered Vertical Comb Based Micro ScannersDocument4 pagesDesign Optimization of CMOS-MEMS Staggered Vertical Comb Based Micro Scannerswenhao chenNo ratings yet
- MagneticDocument10 pagesMagneticr39174746No ratings yet
- Unknown 2Document10 pagesUnknown 2churchilkingstonNo ratings yet
- Circular Waveguide Case Study Cascwghfen23Document11 pagesCircular Waveguide Case Study Cascwghfen23nafis hasnayenNo ratings yet
- Theory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007Document24 pagesTheory & Practice of Electromagnetic Design of DC Motors & Actuators George P. Gogue & Joseph J. Stupak, Jr. G2 Consulting, Beaverton, OR 97007thulasi_krishna100% (1)
- Author's Accepted ManuscriptDocument20 pagesAuthor's Accepted ManuscriptÐɤ Suman Chatterjee100% (1)
- Ho2010 Result of RotorDocument4 pagesHo2010 Result of RotorIraqi stormNo ratings yet
- A Comparative Study On Performance of 3KW InductioDocument7 pagesA Comparative Study On Performance of 3KW InductioAtanuMajiNo ratings yet
- Modelling and Analysis of Transformer Winding at High FrequenciesDocument7 pagesModelling and Analysis of Transformer Winding at High FrequenciesFlores JesusNo ratings yet
- Ijiset V3 I11 11Document5 pagesIjiset V3 I11 11Ali HashemiNo ratings yet
- Effect of Rotor Profiles On The Torque of A Switched ReluctaDocument6 pagesEffect of Rotor Profiles On The Torque of A Switched Reluctaapi-19827661No ratings yet
- Design, Development and Testing of Circular Waveguide Taper For Millimeter Wave Transmission LineDocument4 pagesDesign, Development and Testing of Circular Waveguide Taper For Millimeter Wave Transmission LineWARSE JournalsNo ratings yet
- Mirzaei Ripka Grim A Novel Eddy Current Speed Sensor With Ferrite ECore (2020) AAM 341533Document5 pagesMirzaei Ripka Grim A Novel Eddy Current Speed Sensor With Ferrite ECore (2020) AAM 341533Karthikeyan LNo ratings yet
- Dynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationDocument7 pagesDynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationjobNo ratings yet
- Design of 250 W AC Series MotorDocument3 pagesDesign of 250 W AC Series MotorMiguel ArzamendiaNo ratings yet
- Study of The Synchronous Reluctance Motor DesignDocument8 pagesStudy of The Synchronous Reluctance Motor Designmr. dossNo ratings yet
- Ravic Hand Ran 2006Document4 pagesRavic Hand Ran 2006bnbaNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Spintronics for Next Generation Innovative DevicesFrom EverandSpintronics for Next Generation Innovative DevicesKatsuaki SatoNo ratings yet
- Industrial (Various Automotive and Marine Parts) - Licence - Manufacturing - Royalties Lump-Sum Equity Sublicence-Fee MinimumDocument18 pagesIndustrial (Various Automotive and Marine Parts) - Licence - Manufacturing - Royalties Lump-Sum Equity Sublicence-Fee Minimumdiego peinadoNo ratings yet
- Engineering Science and Technology, An International JournalDocument7 pagesEngineering Science and Technology, An International Journaldiego peinadoNo ratings yet
- Numerical Analysis of A Hybrid Stepper Motor For The Electromagnetic Torque CalculationDocument6 pagesNumerical Analysis of A Hybrid Stepper Motor For The Electromagnetic Torque Calculationdiego peinadoNo ratings yet
- Building Electric Motors For Space, With Redundancy and High ReliabilityDocument6 pagesBuilding Electric Motors For Space, With Redundancy and High Reliabilitydiego peinadoNo ratings yet
- Design and Modeling of A Hybrid Stepper Motor: January 2017Document5 pagesDesign and Modeling of A Hybrid Stepper Motor: January 2017diego peinadoNo ratings yet
- Haake Et Al 2017 CancerDocument10 pagesHaake Et Al 2017 Cancerdiego peinadoNo ratings yet
- E5 Electromagnetic Induction s2 A2324Document14 pagesE5 Electromagnetic Induction s2 A2324AJ CarambasNo ratings yet
- Stationary Battery and DC Power System Electrical Protection Design ConsiderationsDocument7 pagesStationary Battery and DC Power System Electrical Protection Design ConsiderationsEM AmadorNo ratings yet
- Brushless DC Motor FundamentalsDocument7 pagesBrushless DC Motor FundamentalsAdesh JagtapNo ratings yet
- Magnetic Effect of CurrentDocument43 pagesMagnetic Effect of Currentdata teamNo ratings yet
- 3-Phase Induction Motor Notes - 29.03.2022Document135 pages3-Phase Induction Motor Notes - 29.03.2022ronaldeen21No ratings yet
- Starting and Controlof Slip Ring Induction Motors PDFDocument16 pagesStarting and Controlof Slip Ring Induction Motors PDFkubik100% (1)
- Calculating The Flux Density of MagnetsDocument8 pagesCalculating The Flux Density of MagnetsGustavo CentenoNo ratings yet
- Course No: EEE-402: Bangladesh University of Engineering and TechnologyDocument3 pagesCourse No: EEE-402: Bangladesh University of Engineering and Technologyসেলিম সরকার মায়েলNo ratings yet
- Myriad Magnets ProposalDocument16 pagesMyriad Magnets ProposalMathematical Reality with AazmaineNo ratings yet
- Science LessonDocument6 pagesScience Lessonapi-300464822No ratings yet
- DC Machines 2020 NewDocument81 pagesDC Machines 2020 NewYaw Amankrah Sam-OkyereNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed ControlakhilNo ratings yet
- Earth's Magnetic Field: - ObservationsDocument38 pagesEarth's Magnetic Field: - ObservationsHernan CastiblancoNo ratings yet
- Emailing EM Questions From PYPs 2022-2018Document23 pagesEmailing EM Questions From PYPs 2022-2018brandon reileyNo ratings yet
- L14 - Electro-Magnetic InductionDocument12 pagesL14 - Electro-Magnetic InductionAmartya Mishra100% (1)
- Atomic PhysicsDocument106 pagesAtomic PhysicsAkwasi AgyemangNo ratings yet
- Physics 2nd Year TestDocument3 pagesPhysics 2nd Year TestRashid JalalNo ratings yet
- Story of Electricity and MagnetismDocument1 pageStory of Electricity and Magnetismguian abbyNo ratings yet
- 2 - BP Machine 3Document113 pages2 - BP Machine 3DGAFNo ratings yet
- 2 - LMH - Intro To Machinery PrinciplesDocument31 pages2 - LMH - Intro To Machinery PrinciplesTú QuangNo ratings yet
- Electric Motor PresentationDocument16 pagesElectric Motor PresentationBhupender Kumar MahurNo ratings yet
- White Paper IV - William A Tiller PDFDocument18 pagesWhite Paper IV - William A Tiller PDFharrycbaungh100% (1)
- Permanent Magnet Motor Drives With Switched Stator WindingsDocument315 pagesPermanent Magnet Motor Drives With Switched Stator Windingsrasim_m1146No ratings yet
- G6 Electricity and Magnetism - Revision Booklet and ANSDocument21 pagesG6 Electricity and Magnetism - Revision Booklet and ANSAhad AliNo ratings yet
- Dry Type Transformer TestingDocument4 pagesDry Type Transformer TestingGary Martin100% (1)
- NCERT Solutions Physics Chapter 5 Magnetism and MatterDocument11 pagesNCERT Solutions Physics Chapter 5 Magnetism and MatterVidyakulNo ratings yet
- Armature Winding DiagramDocument1 pageArmature Winding DiagramedsoneiccNo ratings yet
- Flemings Left Hand Rule PDF GuideDocument4 pagesFlemings Left Hand Rule PDF GuideSalmaNo ratings yet
- Grounding Transformer and SimulationDocument8 pagesGrounding Transformer and SimulationSe SamnangNo ratings yet
- Cene SipovaDocument36 pagesCene SipovaНевенШтимацNo ratings yet