Download as pdf or txt
You might also like
- PSSe Workshop Day 1Document153 pagesPSSe Workshop Day 1Steve Musarurwa100% (3)
- Volvo BL60B (Sistemas Elétricos)Document228 pagesVolvo BL60B (Sistemas Elétricos)Willian HenriqueNo ratings yet
- Exp6,7,8 2K20CO153Document28 pagesExp6,7,8 2K20CO153divye guptaNo ratings yet
- FormulaSheet - CP 2230 - Fall 2022Document2 pagesFormulaSheet - CP 2230 - Fall 2022cherica bestNo ratings yet
- Buck Converter Design Part 1 - Calculations & SimulationsDocument24 pagesBuck Converter Design Part 1 - Calculations & SimulationselektronikprojeniyapNo ratings yet
- Lecture 15Document5 pagesLecture 15JOSE CARLOS LEON GONZALEZNo ratings yet
- Numerical Assignment2018 1Document3 pagesNumerical Assignment2018 1allswellelleNo ratings yet
- Applied Physics: Electronic Engineering Department Anjum KhairiDocument26 pagesApplied Physics: Electronic Engineering Department Anjum KhairiHussain CommunicationNo ratings yet
- Math (4) PHM 115Document14 pagesMath (4) PHM 115Hoda ElsayedNo ratings yet
- 0 C3 01Document24 pages0 C3 01danytiger132No ratings yet
- HIGH VOLTAGE - L10-AnalysismethodsDocument31 pagesHIGH VOLTAGE - L10-Analysismethodsrezasirjani1No ratings yet
- DC-to-DC Converter in Maximum Power Point Tracking (THE PHOTOVOLTAIC POWER SYSTEM)Document14 pagesDC-to-DC Converter in Maximum Power Point Tracking (THE PHOTOVOLTAIC POWER SYSTEM)Andrei - Cristian SIMIONNo ratings yet
- Chapter 23Document25 pagesChapter 23hamzaxray38No ratings yet
- Finite Element Simulation For Heatline Visualization of Natural ConvectionDocument38 pagesFinite Element Simulation For Heatline Visualization of Natural ConvectionhasanNo ratings yet
- AF 1 Tarea Presión MaldonadoDocument7 pagesAF 1 Tarea Presión MaldonadoArmando MaldonadoNo ratings yet
- 2017 Magnetic Fields NotesDocument17 pages2017 Magnetic Fields NotesTSHIFHANGO TAHKHANINo ratings yet
- Lecture 14: Regression Analysis: Nonlinear RelationshipDocument10 pagesLecture 14: Regression Analysis: Nonlinear RelationshipVictor MlongotiNo ratings yet
- Math 241 Project: Double Integrals Over General RegionsDocument9 pagesMath 241 Project: Double Integrals Over General Regionsanhse_hack100% (1)
- LKNLBK 4 TNNDocument19 pagesLKNLBK 4 TNNbilkheer driveNo ratings yet
- 2 D Conduction-10: - Only option remaining is + λ and using it one getsDocument30 pages2 D Conduction-10: - Only option remaining is + λ and using it one getsArpan SircarNo ratings yet
- Modulations Part4 PDFDocument30 pagesModulations Part4 PDFYogesh ZalteNo ratings yet
- 3-D Conduction in Cylindrical BodyDocument5 pages3-D Conduction in Cylindrical Bodyvikram adityaNo ratings yet
- Fluid Mechanics Project ReportDocument28 pagesFluid Mechanics Project ReportCHAUDHARY HASSANNo ratings yet
- Basic Postulates: Read p.61: DV Q QDocument54 pagesBasic Postulates: Read p.61: DV Q Qyan CNo ratings yet
- Electric PotentialDocument10 pagesElectric PotentialSrishti PathakNo ratings yet
- Unit 1Document8 pagesUnit 1Dr.Sakthivel SNo ratings yet
- Bài Tập Ước Lượng C12346Document55 pagesBài Tập Ước Lượng C12346Nguyễn Viết DươngNo ratings yet
- 1-6 (TD)Document8 pages1-6 (TD)Chhanny SornNo ratings yet
- 2.electric Potential and Capacitance-12th Phy-CbseDocument31 pages2.electric Potential and Capacitance-12th Phy-CbseChris Thereise JoshiNo ratings yet
- Energy Method VariationalDocument23 pagesEnergy Method VariationalVaibhav ChaudhariNo ratings yet
- Part 4: Force, Pressure and Torque Measurement: Strain GaugesDocument3 pagesPart 4: Force, Pressure and Torque Measurement: Strain Gauges123andybNo ratings yet
- Ex2 - SolutionDocument5 pagesEx2 - SolutionNicolas SalibaNo ratings yet
- Power Flow Solution Using Newton - H HD Raphson Method: Series Expansion. SeesepasoDocument25 pagesPower Flow Solution Using Newton - H HD Raphson Method: Series Expansion. SeesepasoBiset SisayNo ratings yet
- T1 5009221091 NaraPangestuApramadaDocument8 pagesT1 5009221091 NaraPangestuApramadaas8416552No ratings yet
- Física General II: FormularioDocument3 pagesFísica General II: FormularioKimberly mosha R.No ratings yet
- Applications of Differential EquationDocument8 pagesApplications of Differential EquationMubeen JavedNo ratings yet
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula Sheetjanaka100% (1)
- Lecture10 ch26Document9 pagesLecture10 ch26gmy101700No ratings yet
- Test2 - Sem1 - 15 - 16 SOLUTIONDocument3 pagesTest2 - Sem1 - 15 - 16 SOLUTIONlolipopNo ratings yet
- Laminar or Viscous Flow 6Document26 pagesLaminar or Viscous Flow 6Sunil BagadeNo ratings yet
- Physics Class 11 DerivationDocument4 pagesPhysics Class 11 Derivation1234raoshabNo ratings yet
- ImpQ Unit3Document4 pagesImpQ Unit3Shagufta ParveenNo ratings yet
- Cramer-Rao Lower Bound: 4.1 Estimator AccuracyDocument7 pagesCramer-Rao Lower Bound: 4.1 Estimator AccuracyÖmer Faruk DemirNo ratings yet
- Chapter 1Document15 pagesChapter 1ُIBRAHEEM ALHARBINo ratings yet
- Asset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineDocument16 pagesAsset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineAbrar ChowdhuryNo ratings yet
- Microwave Class NotesDocument6 pagesMicrowave Class NotesTI NafisNo ratings yet
- Midterm Exam Model 2 - Answer ModelDocument4 pagesMidterm Exam Model 2 - Answer ModelMaher Gomaa IsmaeelNo ratings yet
- Simple Linear RegressionclassroomDocument37 pagesSimple Linear RegressionclassroomNishikata ManipolNo ratings yet
- Chap 25 Part 2Document17 pagesChap 25 Part 2KORNELLIUS SUNDHUNo ratings yet
- Central Force and Kepler ProblemDocument3 pagesCentral Force and Kepler ProblemAnik GhoshNo ratings yet
- Chapter 4Document23 pagesChapter 4amanuelfitsum589No ratings yet
- دورات LS linearDocument30 pagesدورات LS linearAli OmarNo ratings yet
- Solution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodDocument10 pagesSolution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodK.R.Sampath kumarNo ratings yet
- Answer On Question #40029, Math, Differential CalculusDocument2 pagesAnswer On Question #40029, Math, Differential CalculusVasudha SinghNo ratings yet
- Presentations 2 Energy UpdatedDocument8 pagesPresentations 2 Energy UpdatedTariqNo ratings yet
- Lecture06 ch23 2Document11 pagesLecture06 ch23 2gmy101700No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Level 8 Passage 3Document4 pagesLevel 8 Passage 3Mohab MohammedNo ratings yet
- Book TemplateDocument12 pagesBook TemplateMohab MohammedNo ratings yet
- Advanced Study in Power System Analysis: Prof - Dr. Mohamed Shebl Mohamed Dr. Nader Shawky Abd El HakeemDocument16 pagesAdvanced Study in Power System Analysis: Prof - Dr. Mohamed Shebl Mohamed Dr. Nader Shawky Abd El HakeemMohab MohammedNo ratings yet
- Transformer Protection: Prof. Dr. Mousa Abd-AllahDocument24 pagesTransformer Protection: Prof. Dr. Mousa Abd-AllahMohab MohammedNo ratings yet
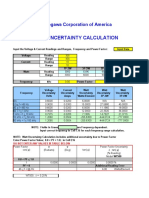
- Yokogawa Test Measurement Power Analyzer Accuracy and Basic Uncertainty Calculator WT500Document3 pagesYokogawa Test Measurement Power Analyzer Accuracy and Basic Uncertainty Calculator WT500Engr Bahadur AliNo ratings yet
- Draw Wire EncoderDocument2 pagesDraw Wire EncoderdiewiesNo ratings yet
- Test Fixture Design GuidelinesDocument20 pagesTest Fixture Design Guidelinesabi raja100% (1)
- WEG WEMOB Brochure 50118441 enDocument15 pagesWEG WEMOB Brochure 50118441 enAsistencia Técnica JLFNo ratings yet
- Victoria University: Lab Report To Investigate The Ferranti Effect Using Artificial Transmission LineDocument20 pagesVictoria University: Lab Report To Investigate The Ferranti Effect Using Artificial Transmission LineAyaz Ahmad100% (1)
- Saudi Arabian Oil Company: Instrument Specification Sheet Level SwitchesDocument1 pageSaudi Arabian Oil Company: Instrument Specification Sheet Level SwitchesDineshNo ratings yet
- Experiment 7 - SolenoidDocument11 pagesExperiment 7 - SolenoidGeo AyoubNo ratings yet
- Safety Relays - PSR-SCP-24DC/FSP/2X1/1X2 - 2986960: Your AdvantagesDocument7 pagesSafety Relays - PSR-SCP-24DC/FSP/2X1/1X2 - 2986960: Your Advantagespedro torresNo ratings yet
- Digital VLSI Design (ECE314/ ECE514) : Lecture-4Document29 pagesDigital VLSI Design (ECE314/ ECE514) : Lecture-4Roshan SoniNo ratings yet
- Pump Motor BookDocument76 pagesPump Motor BookBIGEDTHETERMINATORNo ratings yet
- Ni-CD Battery Charger SpecificationDocument18 pagesNi-CD Battery Charger SpecificationAdrianne DouglasNo ratings yet
- 5 4 VBox User-Manual EngDocument12 pages5 4 VBox User-Manual Engmax2smith-70% (1)
- Catalog of Solar-SAFIAC MINIDocument7 pagesCatalog of Solar-SAFIAC MINIazri mouhamedNo ratings yet
- Project Proposal (Bell)Document2 pagesProject Proposal (Bell)Jojirose Anne Bernardo MondingNo ratings yet
- Catalogo Bosch InglesDocument2 pagesCatalogo Bosch InglesDouglas FernandoNo ratings yet
- Diamond ChipDocument29 pagesDiamond ChipSagar BG25% (4)
- 2 Separator 123 KV in Linie-Paralel Fara CLP - B92145MCDC09-B - R00Document2 pages2 Separator 123 KV in Linie-Paralel Fara CLP - B92145MCDC09-B - R00Nicolae Dan OnacaNo ratings yet
- Submittal Fan Coils 2023-08-21Document23 pagesSubmittal Fan Coils 2023-08-21Ian OsorioNo ratings yet
- CL-21M6MQ6X KS9BDocument28 pagesCL-21M6MQ6X KS9BAless Gutiérrez GuédezNo ratings yet
- Problem Set 1 PDFDocument3 pagesProblem Set 1 PDFIanneSahagunNo ratings yet
- Schaudt Electroblock EBL208 SE InglesDocument12 pagesSchaudt Electroblock EBL208 SE InglesLoredana GattiNo ratings yet
- CP Training Maual-Module 7-Installation of CP SystemsDocument23 pagesCP Training Maual-Module 7-Installation of CP SystemsEmre ErdemNo ratings yet
- Question 812038Document9 pagesQuestion 812038Rudrapalash ChakrabartiNo ratings yet
- Alstom - Digital Integrated Generator Protection RelayDocument24 pagesAlstom - Digital Integrated Generator Protection RelayNinh Quoc TrungNo ratings yet
- Standard Electrical SpecificationDocument9 pagesStandard Electrical SpecificationmatshonaNo ratings yet
- Multimetro Uni-T Diferentes Modelos UT89X (English ORIGINAL)Document1 pageMultimetro Uni-T Diferentes Modelos UT89X (English ORIGINAL)Variedad Retro ActualNo ratings yet
- Danfoss Pressure Transducer 1-10 BarDocument5 pagesDanfoss Pressure Transducer 1-10 Barkathreen mae fabiana100% (1)
- DLProDocument126 pagesDLProzinab90No ratings yet