Download as pdf or txt
You might also like
- Modular 104hp 9U Electronics BoMDocument1 pageModular 104hp 9U Electronics BoMAnonymous 8oCbUZPNo ratings yet
- Secret of The Mastering Engineer (Bob Katz) PDFDocument17 pagesSecret of The Mastering Engineer (Bob Katz) PDFRafaelCosta100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Attachment P.4 Scope-Maintenance Services-Rev 6-12-09Document13 pagesAttachment P.4 Scope-Maintenance Services-Rev 6-12-09stefax2010No ratings yet
- Iecon 2019 8926922Document6 pagesIecon 2019 8926922godspower brunoNo ratings yet
- Modeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsDocument6 pagesModeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsMoon3pellNo ratings yet
- Effect of Rotor Profiles On The Torque of A Switched ReluctaDocument6 pagesEffect of Rotor Profiles On The Torque of A Switched Reluctaapi-19827661No ratings yet
- The Effects of Magnetic Circuit GeometryDocument6 pagesThe Effects of Magnetic Circuit GeometryEduardo BittencourtNo ratings yet
- Ecce 2013 6647381Document6 pagesEcce 2013 6647381Quang HoàngNo ratings yet
- SEM Term AssignmentDocument9 pagesSEM Term Assignmentexamresult.dp4No ratings yet
- 2013 - Sensorless Control in SRM Drives For Four Quadrant OperationDocument5 pages2013 - Sensorless Control in SRM Drives For Four Quadrant OperationMarcelo Vinicius de PaulaNo ratings yet
- Design and Analysis of Switched Reluctance Motors: Ibrahim SENGOR, Abdullah POLAT and Lale T. ERGENEDocument5 pagesDesign and Analysis of Switched Reluctance Motors: Ibrahim SENGOR, Abdullah POLAT and Lale T. ERGENESandesh BhakthaNo ratings yet
- Scope For Designing High Torque Switched Reluctance Motor With Low RipplesDocument12 pagesScope For Designing High Torque Switched Reluctance Motor With Low RipplesEl Manaa BarhoumiNo ratings yet
- Torque Ripple MitigationDocument20 pagesTorque Ripple MitigationSanjayNo ratings yet
- Design of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.Document7 pagesDesign of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.kalyanNo ratings yet
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193No ratings yet
- A Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesDocument6 pagesA Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesGo GoNo ratings yet
- Torque Ripple Minimization in Switched Reluctance Motor Drives PWM Current ControlDocument6 pagesTorque Ripple Minimization in Switched Reluctance Motor Drives PWM Current ControlSuman SahaNo ratings yet
- Design Procedure of Segmented Rotor Switched Reluctance Motor For Direct Drive ApplicationsDocument12 pagesDesign Procedure of Segmented Rotor Switched Reluctance Motor For Direct Drive ApplicationsHarshitha AspariNo ratings yet
- My ReprtDocument13 pagesMy ReprtErfan UdmaNo ratings yet
- Le Huay0Document6 pagesLe Huay0Noor KareemNo ratings yet
- Factor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationDocument8 pagesFactor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationRaphaelNo ratings yet
- On Modeling of A Four-Quadrant Switched PDFDocument11 pagesOn Modeling of A Four-Quadrant Switched PDFSergeyNo ratings yet
- Numerical and Analytical Modeling of Switched Reluctance MachinesDocument8 pagesNumerical and Analytical Modeling of Switched Reluctance Machinesvinay3450% (1)
- Super-High-Speed Switched Reluctance Motor For Automotive TractionDocument8 pagesSuper-High-Speed Switched Reluctance Motor For Automotive TractionHarshitha AspariNo ratings yet
- 037 Takau Full PaperDocument5 pages037 Takau Full PaperJose FrancisNo ratings yet
- Vartanian2009 PDFDocument6 pagesVartanian2009 PDF13sandipNo ratings yet
- Segmented Rotor Mutually Coupled Switched Reluctance MAchine For Low Torque Ripple ApplicationsDocument13 pagesSegmented Rotor Mutually Coupled Switched Reluctance MAchine For Low Torque Ripple ApplicationsedumacerenNo ratings yet
- Analysis of Inductance Characteristics For A BearinglessDocument10 pagesAnalysis of Inductance Characteristics For A Bearinglessalstn7906No ratings yet
- Rotary and Linear Switched Reluctance MotorsDocument12 pagesRotary and Linear Switched Reluctance Motorskarthikeyan249100% (2)
- Mixer Grinder MotorDocument6 pagesMixer Grinder MotorKkbhuvan KkNo ratings yet
- A Comprehensive Study of Multilevel Inverter Fed Switched Reluctance Motor For Torque Ripple Minimization With Multicarrier PWM StrategiesDocument7 pagesA Comprehensive Study of Multilevel Inverter Fed Switched Reluctance Motor For Torque Ripple Minimization With Multicarrier PWM Strategiesicees2018 EEENo ratings yet
- Design of Line-Start Low Speed and High TorqueDocument4 pagesDesign of Line-Start Low Speed and High TorqueQuang HoàngNo ratings yet
- 1 Direct InstantaneousDocument6 pages1 Direct InstantaneouskarnatisharathNo ratings yet
- Chapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorDocument9 pagesChapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorSree GaneshNo ratings yet
- 001 Bien KowskiDocument5 pages001 Bien KowskikarnatisharathNo ratings yet
- Très Important - Dimensionnement D2LDocument8 pagesTrès Important - Dimensionnement D2LSafaAffiNo ratings yet
- Elementary Analysis of Segmental StatorDocument7 pagesElementary Analysis of Segmental StatordafNo ratings yet
- Ding 2017Document27 pagesDing 2017Chandni KovilakathNo ratings yet
- 2540-Article Text-2517-1-6-20210517Document9 pages2540-Article Text-2517-1-6-20210517Atharv NadkarniNo ratings yet
- PERFORMANCE ANALYSIS OF SPEED CONTROL STRATEGY FOR SWITCHED RELUCTANCE MOTOR Ijariie11116Document11 pagesPERFORMANCE ANALYSIS OF SPEED CONTROL STRATEGY FOR SWITCHED RELUCTANCE MOTOR Ijariie11116ntsuandihNo ratings yet
- ROTOR StrikingDocument3 pagesROTOR StrikingDearRed FrankNo ratings yet
- Project AbbtractDocument8 pagesProject Abbtractchannel ThingsNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- A Review of Torque Ripple Control Strategies of Switched Reluctance MotorDocument5 pagesA Review of Torque Ripple Control Strategies of Switched Reluctance Motorsuntchou julesNo ratings yet
- Parameters Determination and Dynamic Modelling of Line-Start Permanent-Magnet Synchronous Motor With A Composite Solid RotorDocument7 pagesParameters Determination and Dynamic Modelling of Line-Start Permanent-Magnet Synchronous Motor With A Composite Solid RotorHamza farooqNo ratings yet
- A Novel Switched Reluctance Motor With C-Core StatorsDocument8 pagesA Novel Switched Reluctance Motor With C-Core Statorsapi-26587237No ratings yet
- 2021 Effect of Manufacturing Tolerances On Cogging Torque of Spoke-Type Permanent Magnet Synchronous MotorDocument6 pages2021 Effect of Manufacturing Tolerances On Cogging Torque of Spoke-Type Permanent Magnet Synchronous MotorMuhammad HumzaNo ratings yet
- Switched Reluctance Motor (SRM)Document8 pagesSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahNo ratings yet
- Designof Sliding Mode Speed Controllerfor Switched ReluctanceDocument6 pagesDesignof Sliding Mode Speed Controllerfor Switched Reluctancegodspower brunoNo ratings yet
- Ptakh 2016Document4 pagesPtakh 2016amir sadighiNo ratings yet
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 pagesNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliNo ratings yet
- Flux-Linkage OF: Characteristics Switc Reluc''I'Ance MotorDocument5 pagesFlux-Linkage OF: Characteristics Switc Reluc''I'Ance MotorGthulasi78No ratings yet
- A Study of The Design For The Flux Reversal Machine 221201 011547Document4 pagesA Study of The Design For The Flux Reversal Machine 221201 011547Rana AtharNo ratings yet
- Magnet Skew in Cogging Torque Minimization of Axial Gap Permanent Magnet MotorsDocument6 pagesMagnet Skew in Cogging Torque Minimization of Axial Gap Permanent Magnet MotorsaugustoNo ratings yet
- Modeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveDocument9 pagesModeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveArthur CaiNo ratings yet
- A Novel Double Stator Hybrid-Excited Flux Reversal Permanent Magnet Machine With Halbach PM ArraysDocument2 pagesA Novel Double Stator Hybrid-Excited Flux Reversal Permanent Magnet Machine With Halbach PM Arrayskyaw winNo ratings yet
- 1 - Switched Reluctance MotorDocument5 pages1 - Switched Reluctance MotorHARSHIT TOMARNo ratings yet
- Ravic Hand Ran 2006Document4 pagesRavic Hand Ran 2006bnbaNo ratings yet
- Torque Ripple Reduction of The Position Sensor-Less Switched Reluctance Motors Applied in The Electrical VehiclesDocument10 pagesTorque Ripple Reduction of The Position Sensor-Less Switched Reluctance Motors Applied in The Electrical VehiclesCIKARANG KOTANo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationFrom EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationNo ratings yet
- p3g30 32 en M j006 Ansi ManualDocument456 pagesp3g30 32 en M j006 Ansi ManualAtiqun NabiNo ratings yet
- .PDF 8Document2 pages.PDF 8Thein TunNo ratings yet
- GSW65D-560D OpenDocument2 pagesGSW65D-560D OpenRafael Ribeiro LandmachineryNo ratings yet
- MC 10147602 9999Document3 pagesMC 10147602 9999zozo0424No ratings yet
- Monitouch v7Document128 pagesMonitouch v7David Martinez GordalizaNo ratings yet
- Prismic Pms Upgrade Solutions: Enhanced Systems For Enhanced PerformanceDocument2 pagesPrismic Pms Upgrade Solutions: Enhanced Systems For Enhanced PerformanceCristhian RuizNo ratings yet
- MFT 4000 Modular Calibrator With Hart Communications: Features & Advantages Models & OptionsDocument2 pagesMFT 4000 Modular Calibrator With Hart Communications: Features & Advantages Models & OptionsAbdalhakeem AlturkyNo ratings yet
- IGCSE Physics Paper 6 Notes 20256 - 2026Document5 pagesIGCSE Physics Paper 6 Notes 20256 - 2026singhaniaakshat1No ratings yet
- Kseeb Previous Year Question Paper Class 12 Physics 2016 PDFDocument16 pagesKseeb Previous Year Question Paper Class 12 Physics 2016 PDFSanjay PrabhuNo ratings yet
- VituixCAD Help 11Document44 pagesVituixCAD Help 11Hery RakotoNo ratings yet
- GW INSTEK Sps-606 Series DatasheetDocument1 pageGW INSTEK Sps-606 Series DatasheetassurendranNo ratings yet
- Analytical Methodology of Tree Microstrip Interconnects Modelling For Signal DistributionDocument239 pagesAnalytical Methodology of Tree Microstrip Interconnects Modelling For Signal DistributionRaul AlvNo ratings yet
- Avery Bench ScaleDocument2 pagesAvery Bench Scalesivakaran100% (1)
- Current and Voltage LawsDocument21 pagesCurrent and Voltage LawssajjadNo ratings yet
- Bohol Island Power Supply PlanDocument59 pagesBohol Island Power Supply PlanCaesar Rey Chico100% (1)
- Stella Doradus Ireland LTD.: 5.2Ghz Base Station AntennaDocument2 pagesStella Doradus Ireland LTD.: 5.2Ghz Base Station AntennaValeria VazquezNo ratings yet
- Palmer Cab 112 B ManualDocument116 pagesPalmer Cab 112 B ManualRick BlokzijlNo ratings yet
- Sensor D ChuvaDocument5 pagesSensor D ChuvarodrigoNo ratings yet
- Lebracs Rubber Linings (P) LTD: Ref: Is 4682 (Part 1) & Bs 6374 (Part V)Document2 pagesLebracs Rubber Linings (P) LTD: Ref: Is 4682 (Part 1) & Bs 6374 (Part V)VivekananthNo ratings yet
- Inteli - AIN8TC Datasheet PDFDocument2 pagesInteli - AIN8TC Datasheet PDFMaylen RivasNo ratings yet
- Technical Seminar Report On Flying CarsDocument19 pagesTechnical Seminar Report On Flying CarsJo Clayton100% (3)
- Power System Harmonic MitigationDocument12 pagesPower System Harmonic MitigationMind of Beauty100% (1)
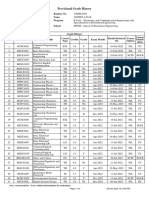
- StudentGradeHistory 21BML0190Document3 pagesStudentGradeHistory 21BML0190brotin2002No ratings yet
- Digital Electronics and Pulse Techniques Lab: Name: Section: ID: DateDocument9 pagesDigital Electronics and Pulse Techniques Lab: Name: Section: ID: DateSakif Ahbab, 190041212No ratings yet
- Sony Cdx-Gt35u Gt39u Gt39ueDocument38 pagesSony Cdx-Gt35u Gt39u Gt39ueShirley Antezana100% (1)
- Dokumen - Tips Check List Installing Nortroll Devices v17Document28 pagesDokumen - Tips Check List Installing Nortroll Devices v17nicolás_lorréNo ratings yet
- 3g Radio Parameter Huawei Ver 1 0Document74 pages3g Radio Parameter Huawei Ver 1 0Abdilla RaisNo ratings yet