Download as pdf or txt
You might also like
- Lab 4 - Hooke's Law - TA GuideDocument5 pagesLab 4 - Hooke's Law - TA GuideBudi LindrawatiNo ratings yet
- Answer Chemistry Trial Mara 2014Document15 pagesAnswer Chemistry Trial Mara 2014RayChin0% (3)
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- GOENAGA APEC2013 Contactless Transfert Energy Piezoelectric ActuatorDocument9 pagesGOENAGA APEC2013 Contactless Transfert Energy Piezoelectric Actuatorjasta 11No ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- DC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterDocument4 pagesDC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterRavindra MauryaNo ratings yet
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- Current Mirror 1Document5 pagesCurrent Mirror 1Shaheer DurraniNo ratings yet
- Ziegler-Nichols Tuning Method: Understanding The PID ControllerDocument13 pagesZiegler-Nichols Tuning Method: Understanding The PID ControllerSaran SelvanNo ratings yet
- IISTE Journals Publication Nearest EditiDocument8 pagesIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNo ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- A DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationDocument6 pagesA DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationAlex VincentNo ratings yet
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDocument21 pagesModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNo ratings yet
- Speed Control of DC Motor Using Pid ControllerDocument4 pagesSpeed Control of DC Motor Using Pid ControllerIvan David Smith100% (1)
- AEE 68 1 2019 - Art - 8Document14 pagesAEE 68 1 2019 - Art - 8Ali ErNo ratings yet
- High Efficiency DC-to-AC Power InverterDocument5 pagesHigh Efficiency DC-to-AC Power InverterDivyabharathi JanakiramanNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- Mca 01 00066Document7 pagesMca 01 00066djkeags24No ratings yet
- Design and Simulation of Speed Control of DC Motor Using ChopperDocument8 pagesDesign and Simulation of Speed Control of DC Motor Using ChopperIJIRSTNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Power Quality Improvement in DC Drives Using Matlab/SimulinkDocument5 pagesPower Quality Improvement in DC Drives Using Matlab/SimulinkwisdombasedcomputingNo ratings yet
- Synchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Document5 pagesSynchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Rick MaityNo ratings yet
- EEE3001 Lab ManualDocument66 pagesEEE3001 Lab ManualReshab Sahoo100% (1)
- Bidirectional DC-DC Conversion in The Traction DriveDocument4 pagesBidirectional DC-DC Conversion in The Traction DrivegacalaNo ratings yet
- Chapter 1Document32 pagesChapter 1Mekonnen AyalNo ratings yet
- ECE 8830 - Electric Drives - LCIDocument62 pagesECE 8830 - Electric Drives - LCIAirton FloresNo ratings yet
- Step-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterDocument6 pagesStep-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterAMIR SOHAILNo ratings yet
- Power ElectronicsDocument114 pagesPower ElectronicsRoyal LakhemaruNo ratings yet
- The Mathematics of Dynamic Power Management On The GridDocument22 pagesThe Mathematics of Dynamic Power Management On The GridwesselisswagNo ratings yet
- Fuzzy OkDocument4 pagesFuzzy OkA Xuan PhuNo ratings yet
- Power System Dynamics and ControlDocument9 pagesPower System Dynamics and ControlBiplab SarkarNo ratings yet
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pages1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVNo ratings yet
- Distribution System DesignDocument6 pagesDistribution System DesignMAcryan Pacquiao PactolNo ratings yet
- ControlDocument18 pagesControlSiaka MsaleNo ratings yet
- Traiki2018 FormulaDocument6 pagesTraiki2018 FormulaTamilselvanNo ratings yet
- Delay Compensation in Model Predictive Current Control of A Three-Phase InverterDocument3 pagesDelay Compensation in Model Predictive Current Control of A Three-Phase InverterNam Doan0% (1)
- Small Signal Transfer Functions and Mathematical Model of The Boost Power ConverterDocument6 pagesSmall Signal Transfer Functions and Mathematical Model of The Boost Power ConverterNtokozo HlatshwayoNo ratings yet
- Eee 1Document3 pagesEee 1Mustafa AlhumayreNo ratings yet
- List of Experiments: S. No Name of The Experiment Any Eight Experiments Should Be ConductedDocument100 pagesList of Experiments: S. No Name of The Experiment Any Eight Experiments Should Be ConductedGangula Praneeth ReddyNo ratings yet
- A High Performance Field-Oriented Control For A Switched Reluctance Motor DriveDocument6 pagesA High Performance Field-Oriented Control For A Switched Reluctance Motor Driveapi-26587237No ratings yet
- ECE 8830 - Electric Drives: Topic 17: Wound-Field Synchronous Machine DrivesDocument62 pagesECE 8830 - Electric Drives: Topic 17: Wound-Field Synchronous Machine DrivesMohamed BerririNo ratings yet
- Lab1: Control/ Electronics System Design: 1/ Requirement AnalysisDocument16 pagesLab1: Control/ Electronics System Design: 1/ Requirement AnalysisJoseph NguyenNo ratings yet
- Speed Control of DC Motor Using PID Controller For Industrial ApplicationDocument4 pagesSpeed Control of DC Motor Using PID Controller For Industrial ApplicationEditor IJTSRDNo ratings yet
- Modelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeDocument9 pagesModelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeJames XgunNo ratings yet
- Simulink - Simon AMBOISEDocument14 pagesSimulink - Simon AMBOISESimon AmboiseNo ratings yet
- Wound-Field Synchronous Machine DrivesDocument62 pagesWound-Field Synchronous Machine DrivesKorlpate BhaskarNo ratings yet
- Speed Modeling of DC Motorcusing Tacho GeneratorDocument7 pagesSpeed Modeling of DC Motorcusing Tacho GeneratorAbanoub Malak SelemNo ratings yet
- 55 Chapter 53Document4 pages55 Chapter 53ud54No ratings yet
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- Chapter - 1 Power Electronics ControlDocument0 pagesChapter - 1 Power Electronics Controlwww.bhawesh.com.npNo ratings yet
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 pagesA Comparative Study of Several Control Techniques Applied To A Boost ConverterulaganathanNo ratings yet
- Drives and Controls Lab Manual1 PDFDocument58 pagesDrives and Controls Lab Manual1 PDFDinesh ReddyNo ratings yet
- Non-Control Transformer Inrush Current: A LimiterDocument6 pagesNon-Control Transformer Inrush Current: A LimiterNohelia CruzNo ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Control of Indirect Matrix Converter Under Unbalanced Source Voltage and Load Current ConditionsDocument7 pagesControl of Indirect Matrix Converter Under Unbalanced Source Voltage and Load Current Conditionssweetu_adit_eeNo ratings yet
- Direct Wave Energy CoverterDocument4 pagesDirect Wave Energy Covertercaturhan007No ratings yet
- Department of Electronics & Electrical Engineering: Indian Institute of Technology GuwahatiDocument20 pagesDepartment of Electronics & Electrical Engineering: Indian Institute of Technology GuwahatiAjay YadavNo ratings yet
- An Independently Regulated Multiple Output Forward Converter TopologyDocument11 pagesAn Independently Regulated Multiple Output Forward Converter TopologyDavidMaighlNo ratings yet
- Modeling and Control of Series Resonant ConverterDocument7 pagesModeling and Control of Series Resonant ConverterKibargoi KipsetmetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ke25 2020Document12 pagesKe25 2020OTOMASYON PLCNo ratings yet
- Embraco EM65HHRDocument4 pagesEmbraco EM65HHROTOMASYON PLCNo ratings yet
- Using Simatic s7 Cpus As SNTP ServersDocument28 pagesUsing Simatic s7 Cpus As SNTP ServersOTOMASYON PLCNo ratings yet
- w05 Basics of Setting Up Profinet Pa NetworksDocument16 pagesw05 Basics of Setting Up Profinet Pa NetworksOTOMASYON PLCNo ratings yet
- Closed Loop Control of DC Drives: Dinesh GopinathDocument53 pagesClosed Loop Control of DC Drives: Dinesh GopinathOTOMASYON PLCNo ratings yet
- Sugar Factory 2 - Equipment PassportDocument64 pagesSugar Factory 2 - Equipment PassportOTOMASYON PLCNo ratings yet
- Modeling & Simulation of Transient Response of A Armature-Controlled Direct Current Motor Using MATLAB/SIMULINKDocument7 pagesModeling & Simulation of Transient Response of A Armature-Controlled Direct Current Motor Using MATLAB/SIMULINKOTOMASYON PLCNo ratings yet
- One Compenent Water SystemDocument7 pagesOne Compenent Water Systemslchem80% (5)
- Design of Cold-Formed Steel Built-Up Post Members - TSNDocument12 pagesDesign of Cold-Formed Steel Built-Up Post Members - TSNNuno PedrinhoNo ratings yet
- ME 205 - Statics Course Syllabus: Fall 2015Document4 pagesME 205 - Statics Course Syllabus: Fall 2015Dhenil ManubatNo ratings yet
- Effects of A PID Controller in Closed Loop Feedback SystemDocument4 pagesEffects of A PID Controller in Closed Loop Feedback Systemali.azim1380No ratings yet
- Dr. Nagaraj Sitaram, Principal & Professor, Amrutha Institute of Engineering & Management, Bidadi, Ramanagar District, KarnatakaDocument69 pagesDr. Nagaraj Sitaram, Principal & Professor, Amrutha Institute of Engineering & Management, Bidadi, Ramanagar District, KarnatakaKarthik A KulalNo ratings yet
- Space Plasma Physics Lecture Week 11 and 12Document3 pagesSpace Plasma Physics Lecture Week 11 and 12Z KNo ratings yet
- Quantum Espresso TutorialDocument23 pagesQuantum Espresso TutorialCarla Vieira SoaresNo ratings yet
- Acoustic FluentDocument28 pagesAcoustic FluentSNADA100% (1)
- DLL Science 8 Dec. 2-6Document4 pagesDLL Science 8 Dec. 2-6Windell RonquilloNo ratings yet
- Fu 2020Document33 pagesFu 2020yazhiniezhilarasanNo ratings yet
- Ad IiDocument8 pagesAd Iisaranstar87No ratings yet
- Topic 3 and 10 Question Set 1Document14 pagesTopic 3 and 10 Question Set 1Michael lIuNo ratings yet
- Load CombDocument72 pagesLoad CombpraveenNo ratings yet
- Homework #1 WorkDocument5 pagesHomework #1 WorkM NabilNo ratings yet
- Standard Base Course Soil ModulusDocument14 pagesStandard Base Course Soil ModulusphatmatNo ratings yet
- Bazant - Size Effect in Blunt Fracture - Concrete, Rock, MetalDocument9 pagesBazant - Size Effect in Blunt Fracture - Concrete, Rock, MetalirfanNo ratings yet
- Biomimicry Of' Bamboo Bast Fiber With Engineering Composite Materials PDFDocument6 pagesBiomimicry Of' Bamboo Bast Fiber With Engineering Composite Materials PDFaya1604No ratings yet
- Chme 302 Chemical Engineering Laboratory - I Experiment 302-6 Radiative Heat TransferDocument6 pagesChme 302 Chemical Engineering Laboratory - I Experiment 302-6 Radiative Heat TransferMECHANICAL ENGINEERINGNo ratings yet
- Cbse Class 8 Science FrictionDocument2 pagesCbse Class 8 Science FrictionsameerroushanNo ratings yet
- Machine Foundations 1Document36 pagesMachine Foundations 1eqa amirNo ratings yet
- Rcwa 1Document5 pagesRcwa 1Ovoi AronnoNo ratings yet
- SPE Paper ReferencesDocument4 pagesSPE Paper ReferencesjamartiNo ratings yet
- Beam 188Document5 pagesBeam 188Hani Aziz AmeenNo ratings yet
- Steel and Timber Report Compiled (Aaa) PDFDocument42 pagesSteel and Timber Report Compiled (Aaa) PDFLee Chen ChoonNo ratings yet
- BSCPH 302 PDFDocument343 pagesBSCPH 302 PDFPankaj RajNo ratings yet
- Heat Transfer Notes PT 2Document8 pagesHeat Transfer Notes PT 2Biniam AlemuNo ratings yet
- Physical Sciences P1 Grade 10 Nov 2018 EngDocument20 pagesPhysical Sciences P1 Grade 10 Nov 2018 EngNompumelelo IkkoNo ratings yet
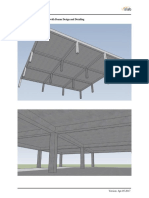
- Two Way Concrete Floor Slab With Beams Design DetailingDocument70 pagesTwo Way Concrete Floor Slab With Beams Design DetailingBryanTiznadoAguilarNo ratings yet