Download as pdf or txt
You might also like
- Inverted Pendulum ProjectDocument10 pagesInverted Pendulum Projectjulien dahrNo ratings yet
- Projectile Motion With Air ResistanceDocument5 pagesProjectile Motion With Air ResistanceGra Vity100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Homework #4Document2 pagesHomework #4Muhammed Hasan GUCLUNo ratings yet
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- Homework # 3Document2 pagesHomework # 3eniNo ratings yet
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDocument7 pagesLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoNo ratings yet
- Robot Manipulator Modeling in Matlab-Simmechanics With PD Control and Online Gravity CompensationDocument5 pagesRobot Manipulator Modeling in Matlab-Simmechanics With PD Control and Online Gravity CompensationBruceNo ratings yet
- Lab5a Fa10Document4 pagesLab5a Fa10alexlenevez_12130% (1)
- Assignment Questions: Course: Computing Applications For Mechanical Systems (MEEN-561)Document26 pagesAssignment Questions: Course: Computing Applications For Mechanical Systems (MEEN-561)cayericaNo ratings yet
- 1 s2.0 S1474667017370519 MainDocument6 pages1 s2.0 S1474667017370519 MainGabrielZamanNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Lab 6Document3 pagesLab 6Vu LeNo ratings yet
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 pagesSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimNo ratings yet
- Hectorguillermo 2018Document6 pagesHectorguillermo 2018vishal BhoknalNo ratings yet
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDocument9 pagesRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNo ratings yet
- MATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachDocument8 pagesMATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachNitsuga PomeloréNo ratings yet
- E1FLA5 2010 v10n2 113Document6 pagesE1FLA5 2010 v10n2 113LÊ Hải NAMNo ratings yet
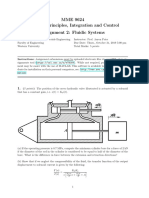
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelNo ratings yet
- Optimal and Pid Controller For Controlling CameraDocument10 pagesOptimal and Pid Controller For Controlling CameraaliramezanidehajNo ratings yet
- Experiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsDocument7 pagesExperiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsFahad AneebNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Robotic Arm Control System For Mars Rover AnalogueDocument5 pagesRobotic Arm Control System For Mars Rover Analoguecntez11No ratings yet
- System Dynamics and ControlDocument10 pagesSystem Dynamics and ControlShahmirBalochNo ratings yet
- A Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotDocument10 pagesA Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotIAES IJAINo ratings yet
- Chemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForDocument12 pagesChemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForIffatNo ratings yet
- Staggering Proportions: Design Lab 5 6.01 - Spring 2013Document6 pagesStaggering Proportions: Design Lab 5 6.01 - Spring 2013elvagojpNo ratings yet
- Lab V - PDFDocument4 pagesLab V - PDFZakNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Automatic Control Lab-1 Mohammed Tahhan 3392027113Document16 pagesAutomatic Control Lab-1 Mohammed Tahhan 3392027113على طرق السفرNo ratings yet
- Assignment LUfactorisationDocument5 pagesAssignment LUfactorisationwebforderNo ratings yet
- Week 7Document27 pagesWeek 7EmoryNo ratings yet
- Exercises 16.06 16.07 Matlab SimulinkDocument6 pagesExercises 16.06 16.07 Matlab SimulinkflowerboyNo ratings yet
- Vibration Lab 2Document14 pagesVibration Lab 2lili aboudNo ratings yet
- 10.2478 - Bipie 2022 0006Document11 pages10.2478 - Bipie 2022 0006Shivam ChaturvediNo ratings yet
- Mini Problem s2 2023Document5 pagesMini Problem s2 2023Annette TageufoueNo ratings yet
- Furuta 1992Document6 pagesFuruta 1992LÊ ĐẠI HIỆPNo ratings yet
- NEWLab1 Servo2 v5 LabManualDocument9 pagesNEWLab1 Servo2 v5 LabManualkrups1991No ratings yet
- Rocket Propulsion Part IDocument9 pagesRocket Propulsion Part IMohamed KhairyNo ratings yet
- UrbaWind, A Computational Fluid Dynamics Tool To Predict Wind Resource in Urban AreaDocument9 pagesUrbaWind, A Computational Fluid Dynamics Tool To Predict Wind Resource in Urban AreaMeteodyn_UrbawindNo ratings yet
- MECH 450 Lab Assignment 2...Document15 pagesMECH 450 Lab Assignment 2...fu MozaNo ratings yet
- CS KOM Fin Jan2021-V2Document1 pageCS KOM Fin Jan2021-V2Osman Agâh YILDIRIMNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- Nelsond Eml4314c Lab1Document4 pagesNelsond Eml4314c Lab1HuyThaiNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- Nonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumDocument12 pagesNonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumVictor PassosNo ratings yet
- Data 1 DuaDocument8 pagesData 1 Duadodol garutNo ratings yet
- 1 Es2 1Document7 pages1 Es2 1godspower brunoNo ratings yet
- Lab+IV Quanser PDFDocument7 pagesLab+IV Quanser PDFZakNo ratings yet
- Adityo 2020 J. Phys. Conf. Ser. 1511 012074Document11 pagesAdityo 2020 J. Phys. Conf. Ser. 1511 012074HendratoNo ratings yet
- SBE 2006 Dynamics Homework Problem: PreambleDocument4 pagesSBE 2006 Dynamics Homework Problem: PreambleNguyen Thanh KhuongNo ratings yet
- Experiment 1 Exercises & Catching-Up Option For Experiment 2Document2 pagesExperiment 1 Exercises & Catching-Up Option For Experiment 2aksizi7No ratings yet
- Damped HarmonicoscillatorDocument13 pagesDamped HarmonicoscillatorAfaq Ahmed AbbasiNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- ACS 2024S1 Assn1Document5 pagesACS 2024S1 Assn11dmsrufNo ratings yet
- Report 2: Performance Analysis of A Finite Aspect Ratio WingDocument8 pagesReport 2: Performance Analysis of A Finite Aspect Ratio WingRODRIGO MARTIN ORTIZNo ratings yet
- MECH - 450 - Lab - Assignment - 2 CorrectingDocument14 pagesMECH - 450 - Lab - Assignment - 2 CorrectingYousef SkdNo ratings yet
- Poles Selection TheoryDocument6 pagesPoles Selection TheoryRao ZubairNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Homework #4Document2 pagesHomework #4Muhammed Hasan GUCLUNo ratings yet
- 1) The Lateral Motion of A Ship Moving With Constant Velocity Is Given byDocument2 pages1) The Lateral Motion of A Ship Moving With Constant Velocity Is Given byMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 1: S S S S GDocument1 pageAE 582 Robust Control in Aerospace Systems Homework 1: S S S S GMuhammed Hasan GUCLUNo ratings yet
- AE 582 Robust Control in Aerospace Systems Homework 2: S S S S GDocument1 pageAE 582 Robust Control in Aerospace Systems Homework 2: S S S S GMuhammed Hasan GUCLUNo ratings yet
- Homework #2Document2 pagesHomework #2Muhammed Hasan GUCLUNo ratings yet
- Homework #3Document3 pagesHomework #3Muhammed Hasan GUCLUNo ratings yet
- Middle East Technical University Department of Aerospace Engineering AE 582: Robust Control in Aerospace SystemsDocument2 pagesMiddle East Technical University Department of Aerospace Engineering AE 582: Robust Control in Aerospace SystemsMuhammed Hasan GUCLUNo ratings yet
- AE 584 Helicopter Dynamics, Stability and Control: Project Due On: Day of FinalDocument2 pagesAE 584 Helicopter Dynamics, Stability and Control: Project Due On: Day of FinalMuhammed Hasan GUCLUNo ratings yet
- AE582 Project AssignmentDocument4 pagesAE582 Project AssignmentMuhammed Hasan GUCLUNo ratings yet
- AE172 Spring2011 HW2v2Document1 pageAE172 Spring2011 HW2v2Muhammed Hasan GUCLUNo ratings yet
- Spring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftDocument19 pagesSpring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftMuhammed Hasan GUCLUNo ratings yet
- AE 172 Homework 2: Name: Muhammed Hasan Güçlü Student Number: 1443423 Submission Date: 20.04.11Document9 pagesAE 172 Homework 2: Name: Muhammed Hasan Güçlü Student Number: 1443423 Submission Date: 20.04.11Muhammed Hasan GUCLUNo ratings yet
- Spring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftDocument30 pagesSpring 2010 AE172: Introduction To Aircraft Performance Elements of An AircraftMuhammed Hasan GUCLUNo ratings yet
- Middle East Technical University Department of Aerospace Engineering AE172: Introduction To Aircraft Performance - Spring 2010Document2 pagesMiddle East Technical University Department of Aerospace Engineering AE172: Introduction To Aircraft Performance - Spring 2010Muhammed Hasan GUCLUNo ratings yet
- Spring 2011 AE172: Introduction To Aircraft Performance: Asst. Prof. Dr. Ali Türker KutayDocument18 pagesSpring 2011 AE172: Introduction To Aircraft Performance: Asst. Prof. Dr. Ali Türker KutayMuhammed Hasan GUCLUNo ratings yet
- Forces and Moments Acting On An A/C: Chord LineDocument46 pagesForces and Moments Acting On An A/C: Chord LineMuhammed Hasan GUCLUNo ratings yet
- Ae172 Midterm Exam 1: Motion Control SurfaceDocument2 pagesAe172 Midterm Exam 1: Motion Control SurfaceMuhammed Hasan GUCLUNo ratings yet
- Spring 2010 AE172: Introduction To Aircraft Performance: Asst. Prof. Dr. Ali Türker KutayDocument6 pagesSpring 2010 AE172: Introduction To Aircraft Performance: Asst. Prof. Dr. Ali Türker KutayMuhammed Hasan GUCLUNo ratings yet
- Aerodynamic Coefficients Example: Find The Resultant Aerodynamic Force Vector Function ofDocument4 pagesAerodynamic Coefficients Example: Find The Resultant Aerodynamic Force Vector Function ofMuhammed Hasan GUCLUNo ratings yet
- MT #2 Sample Problems SolutionsDocument5 pagesMT #2 Sample Problems SolutionsMuhammed Hasan GUCLUNo ratings yet
- Ae172 Midterm Exam 2 Solutions: Continued On The BackDocument10 pagesAe172 Midterm Exam 2 Solutions: Continued On The BackMuhammed Hasan GUCLUNo ratings yet
- American International University-Bangladesh (AIUB) Faculty of EngineeringDocument10 pagesAmerican International University-Bangladesh (AIUB) Faculty of Engineeringsaikat ghoshNo ratings yet
- Note 5 Time Response: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Document10 pagesNote 5 Time Response: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Dhinesh PeriyasamyNo ratings yet
- Dynamic Control of Electric Power SystemsDocument105 pagesDynamic Control of Electric Power SystemsRahul SrivastavaNo ratings yet
- CH - Instrumentation and Process Control PDFDocument22 pagesCH - Instrumentation and Process Control PDFPramodNo ratings yet
- Feedback LabDocument12 pagesFeedback LabPaterson NguepiNo ratings yet
- 04 - First Order SystemDocument16 pages04 - First Order Systemاحمد الريسNo ratings yet
- Torque Control of A Kuka Youbot ArmDocument44 pagesTorque Control of A Kuka Youbot ArmMalik MouajiNo ratings yet
- Compensation DesignDocument11 pagesCompensation Designsuperbs1001No ratings yet
- Simlab 2Document85 pagesSimlab 2Wilson BotchaNo ratings yet
- DR Ian R. Manchester AMME 3500: Root LocusDocument49 pagesDR Ian R. Manchester AMME 3500: Root LocusAladdin AntarNo ratings yet
- Towards Dynamic Task/Posture Control of A 4DOF Humanoid Robotic ArmDocument6 pagesTowards Dynamic Task/Posture Control of A 4DOF Humanoid Robotic ArmmawadNo ratings yet
- Exp 2 - I and II Order ProcessDocument4 pagesExp 2 - I and II Order ProcessErmias NigussieNo ratings yet
- Appendix H: Power System StabilizerDocument15 pagesAppendix H: Power System Stabilizer22t22t22No ratings yet
- LAB 03 ControlDocument9 pagesLAB 03 Controlfiaz023No ratings yet
- First Order SystemsDocument40 pagesFirst Order SystemsWaqas SaghirNo ratings yet
- Chemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForDocument12 pagesChemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForIffatNo ratings yet
- Identification and Estimation (Empirical Models) : D T U G T yDocument11 pagesIdentification and Estimation (Empirical Models) : D T U G T yAnonymous JDXbBDBNo ratings yet
- KM3473 System Dynamics & Control Engineering: Assoc. Prof. Dr. Sallehuddin Mohamed HarisDocument9 pagesKM3473 System Dynamics & Control Engineering: Assoc. Prof. Dr. Sallehuddin Mohamed HarisnatashaNo ratings yet
- DS1103 - Adaptive Control Encoders 10052016Document41 pagesDS1103 - Adaptive Control Encoders 10052016hieuhuechchNo ratings yet
- ENA ManualDocument60 pagesENA ManualAbdul Munim100% (1)
- Computer Science Textbook Solutions - 30Document31 pagesComputer Science Textbook Solutions - 30acc-expertNo ratings yet
- Ee 5307 HomeworksDocument15 pagesEe 5307 HomeworksManoj KumarNo ratings yet
- Assignment Two Last - RegDocument3 pagesAssignment Two Last - RegSolomon LemaNo ratings yet
- Full Download Solutions Manual To Accompany System Dynamics and Response 1st Edition 9780534549305 PDF Full ChapterDocument36 pagesFull Download Solutions Manual To Accompany System Dynamics and Response 1st Edition 9780534549305 PDF Full Chapterbriber.soordus2a4j100% (23)
- Accelerometer Balance SystemDocument6 pagesAccelerometer Balance Systemsenthilkumar99No ratings yet
- Automatic Control For Mechanical Engineers by M. Galal Rabie - OptDocument176 pagesAutomatic Control For Mechanical Engineers by M. Galal Rabie - OptSusan LamNo ratings yet
- Solution Set 5Document11 pagesSolution Set 5Abdul AlsomaliNo ratings yet
- Systems Response With Additional Poles and ZeroesDocument26 pagesSystems Response With Additional Poles and ZeroesHafiz Usman MahmoodNo ratings yet
- Solution A3 NPTEL Control Engg Jan April 2020Document12 pagesSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- Design and Tuning of A Ratio ControllerDocument13 pagesDesign and Tuning of A Ratio ControllerEzgi CoşkunNo ratings yet