Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Oaw 5.0 - 5 Tonne Winch User ManualDocument46 pagesOaw 5.0 - 5 Tonne Winch User Manualtspaes67% (3)
- Renewable Energy Project For Kids: Power From Water: Problem: How Can Hydropower Be Used To Lift An Object?Document4 pagesRenewable Energy Project For Kids: Power From Water: Problem: How Can Hydropower Be Used To Lift An Object?Anh Nguyen100% (1)
- Bộ đề thi thử THPTQG 2022-48-54Document7 pagesBộ đề thi thử THPTQG 2022-48-54Anh NguyenNo ratings yet
- APD Resource Classroom Slides Lesson 1-1Document47 pagesAPD Resource Classroom Slides Lesson 1-1Anh NguyenNo ratings yet
- Light: Please Write The Vocabulary On The Board Before Each LessonDocument20 pagesLight: Please Write The Vocabulary On The Board Before Each LessonAnh NguyenNo ratings yet
- Bộ đề thi thử THPTQG 2022-40-46Document7 pagesBộ đề thi thử THPTQG 2022-40-46Anh NguyenNo ratings yet
- Let's Motor!: Unit Goals Project Entry Event The Driving Project ScenarioDocument20 pagesLet's Motor!: Unit Goals Project Entry Event The Driving Project ScenarioAnh NguyenNo ratings yet
- Lenses and Mirrors: Enrichment ActivityDocument2 pagesLenses and Mirrors: Enrichment ActivityAnh NguyenNo ratings yet
- Lines Lab - Using Iron Filings, Students Will DiagramDocument47 pagesLines Lab - Using Iron Filings, Students Will DiagramAnh NguyenNo ratings yet
- Stahl As 7 Wire Rope Hoist BrochureDocument28 pagesStahl As 7 Wire Rope Hoist BrochureKe HalimunNo ratings yet
- ATT TP 76300 F Fire StoppingDocument84 pagesATT TP 76300 F Fire StoppingFPEBobNo ratings yet
- Variable Frequency Drive VFD Cable Solutions Brochure VFD BrochureDocument4 pagesVariable Frequency Drive VFD Cable Solutions Brochure VFD BrochureERICK NOVOANo ratings yet
- Signaling in RE AreaDocument30 pagesSignaling in RE AreaVikas Srivastav93% (15)
- DWTT - GuideInfo - Conduit Fittings - UL Product IqDocument4 pagesDWTT - GuideInfo - Conduit Fittings - UL Product IqjklelvisNo ratings yet
- Is 3973 1984Document33 pagesIs 3973 1984Dheeraj Thakur100% (1)
- Catalogo EmpalmesDocument2 pagesCatalogo Empalmestitanio123No ratings yet
- Electrical LoadsDocument3 pagesElectrical LoadsJohny Lou LuzaNo ratings yet
- Dual Frequency ZapperDocument19 pagesDual Frequency Zapperjpepe100% (2)
- Wire DrawingDocument7 pagesWire DrawingUtkarsh0% (1)
- Celik Halat CatalogueDocument108 pagesCelik Halat CatalogueTiago FerreiraNo ratings yet
- Thermocouple Questions and AnswersDocument12 pagesThermocouple Questions and AnswersJêmš Navik0% (1)
- Technical Information Separable ConnectorsDocument32 pagesTechnical Information Separable Connectorsalmi yunusNo ratings yet
- 8218JH4Document9 pages8218JH4Ademar FukeNo ratings yet
- BHEL TS HR-FRLS Control CableDocument38 pagesBHEL TS HR-FRLS Control CableBhavesh KeraliaNo ratings yet
- SEAM 4 Lab 1Document3 pagesSEAM 4 Lab 1Joshua AguilarNo ratings yet
- VT23 - Em'cy Fire Pump Starter - 20.10Document5 pagesVT23 - Em'cy Fire Pump Starter - 20.10TamNo ratings yet
- En 50182 2001 (2005)Document74 pagesEn 50182 2001 (2005)Dejan TimotijevicNo ratings yet
- Kawasaki - Kawasaki FE120 FE170 FE250 FE290 FE350 FE400 4-Stroke Air-Cooled Gasoline Engine Service Manual (2000, Kawasaki Heavy Industries)Document102 pagesKawasaki - Kawasaki FE120 FE170 FE250 FE290 FE350 FE400 4-Stroke Air-Cooled Gasoline Engine Service Manual (2000, Kawasaki Heavy Industries)Константин100% (1)
- P17 Tempra Pro: Reliably Versatile - . .Document14 pagesP17 Tempra Pro: Reliably Versatile - . .Laura CallejasNo ratings yet
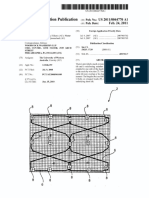
- US20110044770A1 High Energy Mesh Patent Rev1Document16 pagesUS20110044770A1 High Energy Mesh Patent Rev1Christian NissenNo ratings yet
- Charoong Thai Wire & Cable Public Company Limited: Ctw-AcsrDocument2 pagesCharoong Thai Wire & Cable Public Company Limited: Ctw-AcsrAchint KumarNo ratings yet
- 6-36kV Medium Voltage Underground Power CablesDocument48 pages6-36kV Medium Voltage Underground Power CablesHtun SoeNo ratings yet
- Brenda Schweder - Vintage Redux - 2008Document97 pagesBrenda Schweder - Vintage Redux - 2008alrokk100% (3)
- AIR Modeller 53Document68 pagesAIR Modeller 53Carlo Venitucci100% (1)
- SQ Comments - Control Cables Construction & Core Color Identification From SQ CABLES Dt-13!02!2020Document2 pagesSQ Comments - Control Cables Construction & Core Color Identification From SQ CABLES Dt-13!02!2020jamilNo ratings yet
- 5X4.0 RM NYY-LSZHDocument1 page5X4.0 RM NYY-LSZHjamilNo ratings yet
- Steel Strand, Uncoated Seven-Wire For Prestressed ConcreteDocument5 pagesSteel Strand, Uncoated Seven-Wire For Prestressed ConcreteThiên LongNo ratings yet
- Cabaccat2012k RITZDocument28 pagesCabaccat2012k RITZKosong SudahanNo ratings yet