
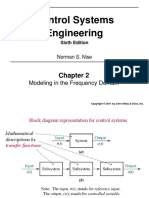
Transfer Function
Transfer Function
You might also like
- Continental O-300 PartsManualDocument48 pagesContinental O-300 PartsManualswooshcmk82% (11)
- GoldWingGL1800 (2020) CompressedDocument316 pagesGoldWingGL1800 (2020) Compressedchan swantananantNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument29 pagesRegulation and Control: by Tewedage SileshiSiraye AbirhamNo ratings yet
- FALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)Document16 pagesFALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)SATHIYANARAYANAN D 15BCM0007No ratings yet
- Review of LaplaceDocument29 pagesReview of LaplaceikhlasahmedsadikikhNo ratings yet
- Laplace HadyDocument50 pagesLaplace HadyIhwan FauziNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleDocument18 pagesMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(No ratings yet
- MATH - 204 Advanced Engineering Mathematics: Lesson No. 10 & 11Document19 pagesMATH - 204 Advanced Engineering Mathematics: Lesson No. 10 & 11ShafiqUrRehmanNo ratings yet
- 2-Mathematical Models of SystemsDocument42 pages2-Mathematical Models of SystemsKeiko AzizahNo ratings yet
- Chapter 3 (10-5-06)Document20 pagesChapter 3 (10-5-06)Pallob BiswasNo ratings yet
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- 1 - The Structure of SI Subpaces in L2Document28 pages1 - The Structure of SI Subpaces in L2Carlos RJNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Tutorial 5: XT EutDocument2 pagesTutorial 5: XT EutNornis DalinaNo ratings yet
- CHAPTER 2: System Modeling in Frequency DomainDocument98 pagesCHAPTER 2: System Modeling in Frequency DomainSanji KarunaNo ratings yet
- Introduction To Laplace TransformsDocument47 pagesIntroduction To Laplace TransformsTalha MazharNo ratings yet
- Control Theory Course: Chapter 2: Mathematical Models of Control SystemDocument70 pagesControl Theory Course: Chapter 2: Mathematical Models of Control SystemTân NguyễnNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Laplace Transform OdeDocument24 pagesLaplace Transform OdeUmer KhanNo ratings yet
- ch03 UnlockedDocument50 pagesch03 Unlockede24112085No ratings yet
- Appendix A: Laplace TransformsDocument11 pagesAppendix A: Laplace TransformsAbdulRhman AL-OmariNo ratings yet
- Module-3 Laplace and Inverse Laplace Transforms PDFDocument45 pagesModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- LaplaceTransform 1Document227 pagesLaplaceTransform 1Komborerai MuvhiringiNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Time Response 1Document16 pagesTime Response 1Nik JaffNo ratings yet
- Laplace TransformDocument56 pagesLaplace TransformzohaibNo ratings yet
- The Laplace TransformsDocument61 pagesThe Laplace TransformsLouie Shaolin Lungao100% (1)
- Sistem Kendali: (Control System)Document21 pagesSistem Kendali: (Control System)AndiHarisNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- 55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaDocument36 pages55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaSandeep K AugustineNo ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Source Free RL CircuitDocument5 pagesSource Free RL CircuitAnonymous yO7rcec6vuNo ratings yet
- Model Matematis Sistem Fisik (Materi 2)Document47 pagesModel Matematis Sistem Fisik (Materi 2)Refly DariseNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- Mece306 ch02 2019 20Document82 pagesMece306 ch02 2019 20Eren ÖzataNo ratings yet
- Laplace TransformDocument71 pagesLaplace Transformsshams5573No ratings yet
- Control Systems Presentation - 2Document37 pagesControl Systems Presentation - 2soumikchatterjee1912No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Laplace Transforms: Reference: Differential Equations With Boundary-Valued Problems by Zill & Cullen 7 EditionDocument45 pagesLaplace Transforms: Reference: Differential Equations With Boundary-Valued Problems by Zill & Cullen 7 EditionIsrael PopeNo ratings yet
- Chapter 2 - Modeling in Fequency Domain (Part 2)Document24 pagesChapter 2 - Modeling in Fequency Domain (Part 2)Thanes WaranNo ratings yet
- Process Conrol 2Document130 pagesProcess Conrol 2SonuNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Mathematical Models of Control SystemsDocument44 pagesMathematical Models of Control SystemsQuốc KhánhNo ratings yet
- Chapter-4 Laplace TransformDocument45 pagesChapter-4 Laplace TransformEndale GezahgnNo ratings yet
- Unit-III Laplace TransformDocument30 pagesUnit-III Laplace TransformRochakNo ratings yet
- Lecture10 VibrationDocument28 pagesLecture10 VibrationAbcNo ratings yet
- ENGI 3424 3 - Laplace Transforms: y Py RyDocument54 pagesENGI 3424 3 - Laplace Transforms: y Py Ryعلي سليمانNo ratings yet
- Time Domain AnalysisDocument14 pagesTime Domain AnalysisAbdullah MdNo ratings yet
- EE 3411 Experiment11Document6 pagesEE 3411 Experiment11souaid.hussen161anNo ratings yet
- Appndx D Mae175Document26 pagesAppndx D Mae175JAyNo ratings yet
- 18mat31 NotesDocument90 pages18mat31 NotesABHI YRS100% (1)
- UNIT-I-T. Veerarajan Laplace TransformsDocument118 pagesUNIT-I-T. Veerarajan Laplace TransformsMaheswari RajnarayananNo ratings yet
- Chapter 2Document17 pagesChapter 2Tarek MohamedNo ratings yet
- EE234 - Lec 2 - Laplace TransformsDocument53 pagesEE234 - Lec 2 - Laplace TransformsGuira JeromeNo ratings yet
- Prof. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseDocument17 pagesProf. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseOsama AlzakyNo ratings yet
- Laplace Transform by Engr. VergaraDocument88 pagesLaplace Transform by Engr. VergaraSharmaine TanNo ratings yet
- Principals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient AnalysisDocument43 pagesPrincipals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient Analysisnitouch35640% (1)
- 938 34172 1 10 20200131Document11 pages938 34172 1 10 2020013110 Doni SyahputraNo ratings yet
- Molykote P40 Grease For Marine IndustryDocument1 pageMolykote P40 Grease For Marine IndustryProject Sales CorpNo ratings yet
- BF 01202562Document3 pagesBF 01202562Josiel Nasc'mentoNo ratings yet
- Aalco Aluminium Alloy SpecificationsDocument5 pagesAalco Aluminium Alloy SpecificationsmatthewpincottNo ratings yet
- Laminar Air FlowDocument9 pagesLaminar Air FlowsserzadNo ratings yet
- Exploring The Innovation in Pulmonary and Respiratory MedicineDocument2 pagesExploring The Innovation in Pulmonary and Respiratory MedicineJamalNo ratings yet
- Seamo Paper - F - 2021Document8 pagesSeamo Paper - F - 2021Bá PhongNo ratings yet
- Goal ProgrammingDocument37 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Auditorium Acoustics 101: by Arthur NoxonDocument4 pagesAuditorium Acoustics 101: by Arthur NoxonMani MuruganNo ratings yet
- Vishay Transducer Application NotesDocument31 pagesVishay Transducer Application Notesxevi00No ratings yet
- 2101 ManDocument110 pages2101 ManValentin soliñoNo ratings yet
- Steam Power Plant: Pros & Cons: What This Power Station Presents Advantages DisadvantagesDocument4 pagesSteam Power Plant: Pros & Cons: What This Power Station Presents Advantages Disadvantagesyanblade100% (2)
- Alternating Current and Direct Current PDFDocument5 pagesAlternating Current and Direct Current PDFHafiz HamzaNo ratings yet
- 48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFDocument13 pages48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFsunil kumarNo ratings yet
- L4 Arabic Core GlossaryDocument58 pagesL4 Arabic Core GlossaryTayseer MashaalNo ratings yet
- Ch06 SlidesDocument73 pagesCh06 SlidesbeelzeburtonNo ratings yet
- Heat Stress HSE PresentationDocument23 pagesHeat Stress HSE PresentationEtibar AliyevNo ratings yet
- Darryl's Lunch MenuDocument2 pagesDarryl's Lunch MenuJenna Renée LumtscherNo ratings yet
- Bulk Oil Circuit BreakerDocument3 pagesBulk Oil Circuit BreakerMudasurNo ratings yet
- MD 9040 TRMS Industrial Digital MultimeterDocument2 pagesMD 9040 TRMS Industrial Digital MultimeterTuan Anh Le CongNo ratings yet
- English 7: Part I: Age of InnocenceDocument4 pagesEnglish 7: Part I: Age of InnocenceAngelNicolinE.SuymanNo ratings yet
- Msds Aerosil R 974Document8 pagesMsds Aerosil R 974Galih Hadi KusumaNo ratings yet
- SQN 90 Dumper ActuarorDocument9 pagesSQN 90 Dumper ActuarorRomica CiorneiNo ratings yet
- Activity 5 Lab ReportDocument5 pagesActivity 5 Lab ReportJay MarcosNo ratings yet
- Security SolutionsDocument3 pagesSecurity SolutionsclubedovarNo ratings yet
- Natural Proiduct QuizDocument39 pagesNatural Proiduct QuizLaraib FatimaNo ratings yet
- Alkhairat Company Profile (Final) Kii LamaadDocument28 pagesAlkhairat Company Profile (Final) Kii LamaadAbdulkadir HusseinNo ratings yet























































































Download as pdf or txt
You might also like
- Continental O-300 PartsManualDocument48 pagesContinental O-300 PartsManualswooshcmk82% (11)
- GoldWingGL1800 (2020) CompressedDocument316 pagesGoldWingGL1800 (2020) Compressedchan swantananantNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument29 pagesRegulation and Control: by Tewedage SileshiSiraye AbirhamNo ratings yet
- FALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)Document16 pagesFALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)SATHIYANARAYANAN D 15BCM0007No ratings yet
- Review of LaplaceDocument29 pagesReview of LaplaceikhlasahmedsadikikhNo ratings yet
- Laplace HadyDocument50 pagesLaplace HadyIhwan FauziNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleDocument18 pagesMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(No ratings yet
- MATH - 204 Advanced Engineering Mathematics: Lesson No. 10 & 11Document19 pagesMATH - 204 Advanced Engineering Mathematics: Lesson No. 10 & 11ShafiqUrRehmanNo ratings yet
- 2-Mathematical Models of SystemsDocument42 pages2-Mathematical Models of SystemsKeiko AzizahNo ratings yet
- Chapter 3 (10-5-06)Document20 pagesChapter 3 (10-5-06)Pallob BiswasNo ratings yet
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- 1 - The Structure of SI Subpaces in L2Document28 pages1 - The Structure of SI Subpaces in L2Carlos RJNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Tutorial 5: XT EutDocument2 pagesTutorial 5: XT EutNornis DalinaNo ratings yet
- CHAPTER 2: System Modeling in Frequency DomainDocument98 pagesCHAPTER 2: System Modeling in Frequency DomainSanji KarunaNo ratings yet
- Introduction To Laplace TransformsDocument47 pagesIntroduction To Laplace TransformsTalha MazharNo ratings yet
- Control Theory Course: Chapter 2: Mathematical Models of Control SystemDocument70 pagesControl Theory Course: Chapter 2: Mathematical Models of Control SystemTân NguyễnNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Laplace Transform OdeDocument24 pagesLaplace Transform OdeUmer KhanNo ratings yet
- ch03 UnlockedDocument50 pagesch03 Unlockede24112085No ratings yet
- Appendix A: Laplace TransformsDocument11 pagesAppendix A: Laplace TransformsAbdulRhman AL-OmariNo ratings yet
- Module-3 Laplace and Inverse Laplace Transforms PDFDocument45 pagesModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- LaplaceTransform 1Document227 pagesLaplaceTransform 1Komborerai MuvhiringiNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Time Response 1Document16 pagesTime Response 1Nik JaffNo ratings yet
- Laplace TransformDocument56 pagesLaplace TransformzohaibNo ratings yet
- The Laplace TransformsDocument61 pagesThe Laplace TransformsLouie Shaolin Lungao100% (1)
- Sistem Kendali: (Control System)Document21 pagesSistem Kendali: (Control System)AndiHarisNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- 55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaDocument36 pages55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaSandeep K AugustineNo ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Source Free RL CircuitDocument5 pagesSource Free RL CircuitAnonymous yO7rcec6vuNo ratings yet
- Model Matematis Sistem Fisik (Materi 2)Document47 pagesModel Matematis Sistem Fisik (Materi 2)Refly DariseNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- Mece306 ch02 2019 20Document82 pagesMece306 ch02 2019 20Eren ÖzataNo ratings yet
- Laplace TransformDocument71 pagesLaplace Transformsshams5573No ratings yet
- Control Systems Presentation - 2Document37 pagesControl Systems Presentation - 2soumikchatterjee1912No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Laplace Transforms: Reference: Differential Equations With Boundary-Valued Problems by Zill & Cullen 7 EditionDocument45 pagesLaplace Transforms: Reference: Differential Equations With Boundary-Valued Problems by Zill & Cullen 7 EditionIsrael PopeNo ratings yet
- Chapter 2 - Modeling in Fequency Domain (Part 2)Document24 pagesChapter 2 - Modeling in Fequency Domain (Part 2)Thanes WaranNo ratings yet
- Process Conrol 2Document130 pagesProcess Conrol 2SonuNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Mathematical Models of Control SystemsDocument44 pagesMathematical Models of Control SystemsQuốc KhánhNo ratings yet
- Chapter-4 Laplace TransformDocument45 pagesChapter-4 Laplace TransformEndale GezahgnNo ratings yet
- Unit-III Laplace TransformDocument30 pagesUnit-III Laplace TransformRochakNo ratings yet
- Lecture10 VibrationDocument28 pagesLecture10 VibrationAbcNo ratings yet
- ENGI 3424 3 - Laplace Transforms: y Py RyDocument54 pagesENGI 3424 3 - Laplace Transforms: y Py Ryعلي سليمانNo ratings yet
- Time Domain AnalysisDocument14 pagesTime Domain AnalysisAbdullah MdNo ratings yet
- EE 3411 Experiment11Document6 pagesEE 3411 Experiment11souaid.hussen161anNo ratings yet
- Appndx D Mae175Document26 pagesAppndx D Mae175JAyNo ratings yet
- 18mat31 NotesDocument90 pages18mat31 NotesABHI YRS100% (1)
- UNIT-I-T. Veerarajan Laplace TransformsDocument118 pagesUNIT-I-T. Veerarajan Laplace TransformsMaheswari RajnarayananNo ratings yet
- Chapter 2Document17 pagesChapter 2Tarek MohamedNo ratings yet
- EE234 - Lec 2 - Laplace TransformsDocument53 pagesEE234 - Lec 2 - Laplace TransformsGuira JeromeNo ratings yet
- Prof. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseDocument17 pagesProf. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseOsama AlzakyNo ratings yet
- Laplace Transform by Engr. VergaraDocument88 pagesLaplace Transform by Engr. VergaraSharmaine TanNo ratings yet
- Principals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient AnalysisDocument43 pagesPrincipals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient Analysisnitouch35640% (1)
- 938 34172 1 10 20200131Document11 pages938 34172 1 10 2020013110 Doni SyahputraNo ratings yet
- Molykote P40 Grease For Marine IndustryDocument1 pageMolykote P40 Grease For Marine IndustryProject Sales CorpNo ratings yet
- BF 01202562Document3 pagesBF 01202562Josiel Nasc'mentoNo ratings yet
- Aalco Aluminium Alloy SpecificationsDocument5 pagesAalco Aluminium Alloy SpecificationsmatthewpincottNo ratings yet
- Laminar Air FlowDocument9 pagesLaminar Air FlowsserzadNo ratings yet
- Exploring The Innovation in Pulmonary and Respiratory MedicineDocument2 pagesExploring The Innovation in Pulmonary and Respiratory MedicineJamalNo ratings yet
- Seamo Paper - F - 2021Document8 pagesSeamo Paper - F - 2021Bá PhongNo ratings yet
- Goal ProgrammingDocument37 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Auditorium Acoustics 101: by Arthur NoxonDocument4 pagesAuditorium Acoustics 101: by Arthur NoxonMani MuruganNo ratings yet
- Vishay Transducer Application NotesDocument31 pagesVishay Transducer Application Notesxevi00No ratings yet
- 2101 ManDocument110 pages2101 ManValentin soliñoNo ratings yet
- Steam Power Plant: Pros & Cons: What This Power Station Presents Advantages DisadvantagesDocument4 pagesSteam Power Plant: Pros & Cons: What This Power Station Presents Advantages Disadvantagesyanblade100% (2)
- Alternating Current and Direct Current PDFDocument5 pagesAlternating Current and Direct Current PDFHafiz HamzaNo ratings yet
- 48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFDocument13 pages48VCD-1 - 48V Telecom Battery Monitor (Rev A-101) PDFsunil kumarNo ratings yet
- L4 Arabic Core GlossaryDocument58 pagesL4 Arabic Core GlossaryTayseer MashaalNo ratings yet
- Ch06 SlidesDocument73 pagesCh06 SlidesbeelzeburtonNo ratings yet
- Heat Stress HSE PresentationDocument23 pagesHeat Stress HSE PresentationEtibar AliyevNo ratings yet
- Darryl's Lunch MenuDocument2 pagesDarryl's Lunch MenuJenna Renée LumtscherNo ratings yet
- Bulk Oil Circuit BreakerDocument3 pagesBulk Oil Circuit BreakerMudasurNo ratings yet
- MD 9040 TRMS Industrial Digital MultimeterDocument2 pagesMD 9040 TRMS Industrial Digital MultimeterTuan Anh Le CongNo ratings yet
- English 7: Part I: Age of InnocenceDocument4 pagesEnglish 7: Part I: Age of InnocenceAngelNicolinE.SuymanNo ratings yet
- Msds Aerosil R 974Document8 pagesMsds Aerosil R 974Galih Hadi KusumaNo ratings yet
- SQN 90 Dumper ActuarorDocument9 pagesSQN 90 Dumper ActuarorRomica CiorneiNo ratings yet
- Activity 5 Lab ReportDocument5 pagesActivity 5 Lab ReportJay MarcosNo ratings yet
- Security SolutionsDocument3 pagesSecurity SolutionsclubedovarNo ratings yet
- Natural Proiduct QuizDocument39 pagesNatural Proiduct QuizLaraib FatimaNo ratings yet
- Alkhairat Company Profile (Final) Kii LamaadDocument28 pagesAlkhairat Company Profile (Final) Kii LamaadAbdulkadir HusseinNo ratings yet