Download as pdf or txt
You might also like
- Caterpillar 323d 323d L 323d LN Excavators Parts ManualDocument20 pagesCaterpillar 323d 323d L 323d LN Excavators Parts Manualwilliam100% (59)
- 2020 - Sample AnswerDocument9 pages2020 - Sample AnswerMuireann O'ConnorNo ratings yet
- Routes of Wrath Report 2023Document176 pagesRoutes of Wrath Report 2023Taniya Roy100% (4)
- Beyond Countless Doorways - A Planar SourcebookDocument226 pagesBeyond Countless Doorways - A Planar SourcebookPilotgod123100% (8)
- Bodyweight Sports TrainingDocument56 pagesBodyweight Sports TrainingJoshp3c100% (18)
- Stochastic Geometry Methods For Modelling Automotive Radar InterferenceDocument11 pagesStochastic Geometry Methods For Modelling Automotive Radar Interferencefavorite ManiNo ratings yet
- Vol 14 SI Dec 2021 127-139Document13 pagesVol 14 SI Dec 2021 127-139Farouk BoumehrezNo ratings yet
- Radio Propagation Model in Vehicular Ad Hoc Network (Vanet)Document18 pagesRadio Propagation Model in Vehicular Ad Hoc Network (Vanet)Shaik GhousiaNo ratings yet
- Wireless Seminar ReportDocument36 pagesWireless Seminar Reportamol Akolkar ( amolpc86)0% (1)
- Sensors 22 06142 With CoverDocument16 pagesSensors 22 06142 With CoverFernando ShadowNo ratings yet
- Symmetry 13 00438 v2Document22 pagesSymmetry 13 00438 v2PushpakNo ratings yet
- Sensors 20 07283Document21 pagesSensors 20 07283Gopinathrg19 KrishNo ratings yet
- Obstacle Shadowing Influences in VANET SafetyDocument3 pagesObstacle Shadowing Influences in VANET SafetyHaider AlSabbaghNo ratings yet
- The Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart CityDocument4 pagesThe Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart Citymohamed salamaNo ratings yet
- Automotive Radar - From Its Origins To Future DirectionsDocument8 pagesAutomotive Radar - From Its Origins To Future Directionsmadhu_g100% (1)
- Simulation Based Evaluation of Highway Road Scenario Between DSRC/802.11p MAC Protocol and STDMA For Vehicle-to-Vehicle CommunicationDocument17 pagesSimulation Based Evaluation of Highway Road Scenario Between DSRC/802.11p MAC Protocol and STDMA For Vehicle-to-Vehicle CommunicationHạt Bụi Cô ĐơnNo ratings yet
- Sensors - Mobilr Fading Channels-18-00475Document19 pagesSensors - Mobilr Fading Channels-18-00475Tenda TiyNo ratings yet
- Improved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive RadarDocument15 pagesImproved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive Radarwho3No ratings yet
- Experimental Study On The Impact of Vehicular Obstructions in VanetsDocument8 pagesExperimental Study On The Impact of Vehicular Obstructions in VanetsymaisaraNo ratings yet
- Vehicle To Vehicle Communication and Collision Warning ProtocolDocument4 pagesVehicle To Vehicle Communication and Collision Warning ProtocolaislynpythonNo ratings yet
- Signal Processing For TDM MIMO FMCW Millimeter-Wave Radar SensorsDocument13 pagesSignal Processing For TDM MIMO FMCW Millimeter-Wave Radar SensorsMadhusudhana RaoNo ratings yet
- Cooperative Cognitive Intelligence For Internet of VehiclesDocument10 pagesCooperative Cognitive Intelligence For Internet of VehiclesMangal SinghNo ratings yet
- Conference 2Document7 pagesConference 2quansmile1234No ratings yet
- GPS Based Vehicular Collision Warning System Using IEEE 802.15.4 MAC/PHY StandardDocument6 pagesGPS Based Vehicular Collision Warning System Using IEEE 802.15.4 MAC/PHY StandardEleazar DavidNo ratings yet
- Automotive Radar - MATLAB & SimulinkDocument3 pagesAutomotive Radar - MATLAB & SimulinkAdfgatLjsdcolqwdhjpNo ratings yet
- Imagine Living in A World Where Cars Could TalkDocument27 pagesImagine Living in A World Where Cars Could TalkMd. Rashed RahmanNo ratings yet
- Coherent Automotive Radar Networks The Next Generation of Radar-Based Imaging and MappingDocument15 pagesCoherent Automotive Radar Networks The Next Generation of Radar-Based Imaging and MappingNicholas FeatherstonNo ratings yet
- VAFER Signal Decomposition Based MutualDocument11 pagesVAFER Signal Decomposition Based Mutualwho3No ratings yet
- Effect of Multi-Frequency Beam Alignment On Non-Line-of-Site Vehicle To Infrastructure Communication Using CI Model (CI-NLOS-V2I)Document6 pagesEffect of Multi-Frequency Beam Alignment On Non-Line-of-Site Vehicle To Infrastructure Communication Using CI Model (CI-NLOS-V2I)Dina And OmarNo ratings yet
- Optimal Intelligent Vehicle Control System For Emergency Vehicle Using Visible Light Communication VANETDocument19 pagesOptimal Intelligent Vehicle Control System For Emergency Vehicle Using Visible Light Communication VANETIJRASETPublicationsNo ratings yet
- Car To Car Communication Using RF Cognitive RadioDocument22 pagesCar To Car Communication Using RF Cognitive Radiorajulal13No ratings yet
- 1Document8 pages1Saravanan PalaniNo ratings yet
- A DSRC-Based Vehicular Positioning Enhancement Using A Distributed Multiple-Model Kalman FilterDocument13 pagesA DSRC-Based Vehicular Positioning Enhancement Using A Distributed Multiple-Model Kalman FilterHanan AltousNo ratings yet
- Comparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosDocument14 pagesComparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosijngnNo ratings yet
- Optimizing The Spectral Efficiency of The Wi-Fi-Ad-hoc Network ConnectionDocument14 pagesOptimizing The Spectral Efficiency of The Wi-Fi-Ad-hoc Network Connectionsteve rolansNo ratings yet
- Hybrid Beamforming For Multi-Carrier Dual-Function Radar-Communication SystemDocument14 pagesHybrid Beamforming For Multi-Carrier Dual-Function Radar-Communication SystemRAVI SHANKAR JHANo ratings yet
- An Overview of The Last Progress and Core Challenge of Autonomous VehiclesDocument7 pagesAn Overview of The Last Progress and Core Challenge of Autonomous Vehicleszart123No ratings yet
- Remotesensing 14 05416Document30 pagesRemotesensing 14 05416fakeNo ratings yet
- Vehicular WirelessDocument16 pagesVehicular Wirelesskanchan145No ratings yet
- Enhanced Spring Clustering in Vanets With Obstruction ConsiderationsDocument6 pagesEnhanced Spring Clustering in Vanets With Obstruction ConsiderationsRajkumar JainNo ratings yet
- Inter Intra Vehicle Wireless CommunicationDocument20 pagesInter Intra Vehicle Wireless CommunicationSuhi TeoNo ratings yet
- Idt 15 Idt200106Document15 pagesIdt 15 Idt200106ImaneNo ratings yet
- Demba 2018Document6 pagesDemba 2018vinay kumarNo ratings yet
- Increasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentDocument10 pagesIncreasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentnabilNo ratings yet
- Low Latency Vehicular Edge A Vehicular Infr 2020 Simulation Modelling PractDocument17 pagesLow Latency Vehicular Edge A Vehicular Infr 2020 Simulation Modelling Practmohamed albasunyNo ratings yet
- Reliability and ConnecReliability and Connectivity Analysis of Vehicluar Ad Hoc Networks For A Highway Tunneltivity AnalysisDocument6 pagesReliability and ConnecReliability and Connectivity Analysis of Vehicluar Ad Hoc Networks For A Highway Tunneltivity AnalysisNaser MovahhediniaNo ratings yet
- Paper 1Document5 pagesPaper 1DaliaNo ratings yet
- 12-Vehicular Ad Hoc Networks (VANET)Document78 pages12-Vehicular Ad Hoc Networks (VANET)Venu MadhavNo ratings yet
- Novel Routing Protocol For Vehicular AdhocDocument5 pagesNovel Routing Protocol For Vehicular AdhocconwamcNo ratings yet
- Sensors: Experimental Demonstration of Mmwave Vehicle-To-Vehicle Communications Using Ieee 802.11adDocument22 pagesSensors: Experimental Demonstration of Mmwave Vehicle-To-Vehicle Communications Using Ieee 802.11adlaeeeqNo ratings yet
- Vehicle To Infrastructure Communication Different Methods and Technologies Used For ItDocument3 pagesVehicle To Infrastructure Communication Different Methods and Technologies Used For ItBargavi SrinivasNo ratings yet
- Automatic Lane Identification Using The Roadside Lidar SensorsDocument11 pagesAutomatic Lane Identification Using The Roadside Lidar SensorsGhionNo ratings yet
- Sensors 21 03485Document24 pagesSensors 21 03485wayne.nguyenNo ratings yet
- Concerns and Difficulties Associated With Vehicular Ad Hoc Networks (VANET)Document15 pagesConcerns and Difficulties Associated With Vehicular Ad Hoc Networks (VANET)teto felNo ratings yet
- Co-Design For Overlaid MIMO Radar and Downlink MISO Communication Systems Via CramrRao Bound MinimizationDocument14 pagesCo-Design For Overlaid MIMO Radar and Downlink MISO Communication Systems Via CramrRao Bound MinimizationAparna MishraNo ratings yet
- Index Coding-Based Data Exchange in A Vehicular Network JunctionDocument5 pagesIndex Coding-Based Data Exchange in A Vehicular Network Junctionlouai00No ratings yet
- A Highly Scalable IEEE802.11p Subsystem Using Communication and Localization For Increased Vehicular SafetyDocument6 pagesA Highly Scalable IEEE802.11p Subsystem Using Communication and Localization For Increased Vehicular SafetygobinathNo ratings yet
- Analysis and Evaluation of Random Access Transmission For UAV-Assisted Vehicular-to-Infrastructure CommunicationsDocument14 pagesAnalysis and Evaluation of Random Access Transmission For UAV-Assisted Vehicular-to-Infrastructure CommunicationsZeeshan ShafiqNo ratings yet
- S - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inDocument8 pagesS - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inijngnNo ratings yet
- Robust and Low-Complexity Cooperative Spectrum Sensing Via Low-Rank Matrix Recovery in Cognitive Vehicular NetworksDocument15 pagesRobust and Low-Complexity Cooperative Spectrum Sensing Via Low-Rank Matrix Recovery in Cognitive Vehicular NetworksMashood QadeerNo ratings yet
- Software Defined Radios in S Atellite Communication: Trident Academy of TechnologyDocument21 pagesSoftware Defined Radios in S Atellite Communication: Trident Academy of Technology108databoxNo ratings yet
- Nagarjuna College of Engineering & Technology: " Vehicle-To-Vehicle Communication"Document15 pagesNagarjuna College of Engineering & Technology: " Vehicle-To-Vehicle Communication"lavanya LNo ratings yet
- Vehicle-to-Vehicle Safety Messaging in DSRCDocument10 pagesVehicle-to-Vehicle Safety Messaging in DSRCAnupam SamantaNo ratings yet
- Intelligent Transport Systems: Technologies and ApplicationsFrom EverandIntelligent Transport Systems: Technologies and ApplicationsAsier PerallosNo ratings yet
- FIN-01. Purchasing ProcedureDocument7 pagesFIN-01. Purchasing ProcedureVu Dinh ThietNo ratings yet
- Clean and Unclean Among Jews Christians Brahmins of Kerala: Pollution IdeaDocument13 pagesClean and Unclean Among Jews Christians Brahmins of Kerala: Pollution IdeaGeorge MenacheryNo ratings yet
- China As A Rising Global PowerDocument11 pagesChina As A Rising Global PoweranggrainytreeseptianNo ratings yet
- Mvno - Encik KunciDocument15 pagesMvno - Encik KunciJolliffe NicholasNo ratings yet
- 245-Article Text-493-1-10-20220221Document8 pages245-Article Text-493-1-10-20220221Mr DNo ratings yet
- Murder in The CathedralDocument14 pagesMurder in The Cathedralprime_cuts100% (1)
- Amazon.com_ New Precision 5540 Mobile Workstation Laptop 9th Gen i9-9880H, 8 Core up to 4.80GHz vPro 1TB SSD 64GB Ram Nvidia Quadro P2000 4GB 15.6_ 4K UHD 3840x2160, Touch Display Win 10 Pro_ Computers & AccessoriesDocument12 pagesAmazon.com_ New Precision 5540 Mobile Workstation Laptop 9th Gen i9-9880H, 8 Core up to 4.80GHz vPro 1TB SSD 64GB Ram Nvidia Quadro P2000 4GB 15.6_ 4K UHD 3840x2160, Touch Display Win 10 Pro_ Computers & AccessoriesBirungi NelsonNo ratings yet
- Book Review " THE GREAT GATSBY "Document5 pagesBook Review " THE GREAT GATSBY "sayemNo ratings yet
- Chikmagalur RtiDocument10 pagesChikmagalur RtiSK Business groupNo ratings yet
- Source Rock Identification by IsotopeDocument11 pagesSource Rock Identification by IsotopeNdeye Khady NdiayeNo ratings yet
- Martinez Vs Van BuskirkDocument2 pagesMartinez Vs Van BuskirkMinato NamikazeNo ratings yet
- GraduatingresumeDocument3 pagesGraduatingresumeapi-277434369No ratings yet
- Creation in 6 Days by Alvin Boyd KuhnDocument27 pagesCreation in 6 Days by Alvin Boyd Kuhnrotas50No ratings yet
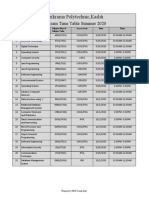
- Parikrama Polytechnic, Kashti: MSBTE TH Exam Time Table Summer 2020Document1 pageParikrama Polytechnic, Kashti: MSBTE TH Exam Time Table Summer 2020pratiksha khamkarNo ratings yet
- LAB 2 EmbeddedDocument21 pagesLAB 2 EmbeddedLeonelNo ratings yet
- English Modal VerbsDocument10 pagesEnglish Modal VerbsMaría Auxiliadora Jácome OrtegaNo ratings yet
- Affirmation PowerDocument39 pagesAffirmation PowerIman Jaya100% (2)
- Sociology Module B1 2017Document3 pagesSociology Module B1 2017Aerielle CanoNo ratings yet
- Assignment 3 Individual AssignmentDocument13 pagesAssignment 3 Individual AssignmentThư Phan MinhNo ratings yet
- History Conclusions + Important StatsDocument20 pagesHistory Conclusions + Important Statsemma karakaidouNo ratings yet
- Dean Quicho - Legal EthicsDocument31 pagesDean Quicho - Legal EthicsGlenda Lyn ArañoNo ratings yet
- School Action Plan in NDEP 2019 2020Document1 pageSchool Action Plan in NDEP 2019 2020CHAPEL JUN PACIENTENo ratings yet
- Solutions Manual and Test Bank Operations and Supply Chain Management 3rd Edition JacobsDocument5 pagesSolutions Manual and Test Bank Operations and Supply Chain Management 3rd Edition Jacobsanie0% (1)
- Nagunni 1Document2 pagesNagunni 1mayank.sharmaNo ratings yet
- Reading in Philippines HistoryDocument7 pagesReading in Philippines Historyrafaelalmazar416No ratings yet