Download as pdf or txt
You might also like
- Ashutosh Pramanik - Electromagnetism - Problems and Solutions PDFDocument914 pagesAshutosh Pramanik - Electromagnetism - Problems and Solutions PDFsss pmNo ratings yet
- MEM 660 Theory of Elasticity: Course Syllabus Instructor InformationDocument3 pagesMEM 660 Theory of Elasticity: Course Syllabus Instructor Informationnick10686No ratings yet
- Audio Effects in MATLAB: Experiment 1Document6 pagesAudio Effects in MATLAB: Experiment 1Lucio BianchiNo ratings yet
- Riley 1993Document7 pagesRiley 1993xmzbiskydemrfuvsjvNo ratings yet
- FM Threshold and Methods of Limiting Its Effect On PerformanceDocument7 pagesFM Threshold and Methods of Limiting Its Effect On Performancemark lumbresNo ratings yet
- Module 7 2 PhaseNoiseDocument61 pagesModule 7 2 PhaseNoiseMeeraNo ratings yet
- Jitter 1690318488Document46 pagesJitter 1690318488कुनाल सिंहNo ratings yet
- Influence of RF Oscillators On An Ofdm SignalDocument12 pagesInfluence of RF Oscillators On An Ofdm SignalLi ChunshuNo ratings yet
- Chapter11 Fractional-N SynthesizersDocument51 pagesChapter11 Fractional-N SynthesizersNikunj ShahNo ratings yet
- Noise in Distributed Raman AmplificationDocument15 pagesNoise in Distributed Raman Amplificationhas samNo ratings yet
- Direct RF Sampling Mixer With Recursive Filtering in Charge DomainDocument4 pagesDirect RF Sampling Mixer With Recursive Filtering in Charge DomainBinod AdhikariNo ratings yet
- Vector Network AnalysisDocument17 pagesVector Network AnalysisRakshithNo ratings yet
- ECS455 - 5 - 1 - OFDM U1Document27 pagesECS455 - 5 - 1 - OFDM U1prapunNo ratings yet
- Self Adaptive Microwave FiltersDocument4 pagesSelf Adaptive Microwave FiltersVanitha KaremollaNo ratings yet
- Vanoverschele 1975 Punch Through Diode MixerDocument7 pagesVanoverschele 1975 Punch Through Diode MixerDr. Uday Sheorey, Ph.D.No ratings yet
- INTRODUCTION TO COMMUNICATION SYSTEMS Lab3Document8 pagesINTRODUCTION TO COMMUNICATION SYSTEMS Lab3tetraprimigNo ratings yet
- Active and Passive Filter CircuitsDocument10 pagesActive and Passive Filter CircuitsDavid.R.Gilson88% (8)
- The Decision-Feedback Equalizer PDFDocument5 pagesThe Decision-Feedback Equalizer PDFHuy Nguyễn QuốcNo ratings yet
- TWTA Linearization: Need For LinearityDocument12 pagesTWTA Linearization: Need For LinearityAnanda KrishnaNo ratings yet
- A Wideband Fractional-N PLL With Suppressed Charge-Pump Noise and Automatic Loop Filter Calibration 2013Document4 pagesA Wideband Fractional-N PLL With Suppressed Charge-Pump Noise and Automatic Loop Filter Calibration 2013ManiNo ratings yet
- Amplifiers of Free-Space Terahertz RadiationDocument4 pagesAmplifiers of Free-Space Terahertz RadiationjaesennNo ratings yet
- The Decision-Feedback Equalizer A Circuit For All SeasonsDocument5 pagesThe Decision-Feedback Equalizer A Circuit For All SeasonsRafid AdnanNo ratings yet
- Oscillator Noise Analysis:: (T) Be A Noisy Signal. It Can Be Separated Into A N (T)Document12 pagesOscillator Noise Analysis:: (T) Be A Noisy Signal. It Can Be Separated Into A N (T)deepakvaj25No ratings yet
- Noise Cancellation Using Anc (Active Noise Control) System: Bana Handaga, Fajar SuryawanDocument8 pagesNoise Cancellation Using Anc (Active Noise Control) System: Bana Handaga, Fajar Suryawanvedant shahNo ratings yet
- Active Noise Control of Axial Fans: Barbu Dragan, Florin TaraboantaDocument4 pagesActive Noise Control of Axial Fans: Barbu Dragan, Florin TaraboantakktayNo ratings yet
- A Schroeder Reverberator Called JCRevDocument5 pagesA Schroeder Reverberator Called JCRevLaboratorio Sonido2No ratings yet
- Data Converters1Document30 pagesData Converters1Vidyanand PattarNo ratings yet
- MWE Radar Notes Set-2Document10 pagesMWE Radar Notes Set-2Yeslin SequeiraNo ratings yet
- The Phase Sensitive (Lock-In) DetectorDocument21 pagesThe Phase Sensitive (Lock-In) DetectorBert ColijnNo ratings yet
- Oscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEEDocument11 pagesOscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEEvirendra_verma5No ratings yet
- Analog To Digital ConversionDocument11 pagesAnalog To Digital Conversionsaurabh2078No ratings yet
- Low-Noise Voltage-Controlled Oscillators Using Enhanced LC-tanksDocument11 pagesLow-Noise Voltage-Controlled Oscillators Using Enhanced LC-tankssm123ts456No ratings yet
- A Study of Phase Noise in CMOS Oscillators: Behzad RazaviDocument13 pagesA Study of Phase Noise in CMOS Oscillators: Behzad Razavikijiji userNo ratings yet
- A Study of Phase Noise in CMOS Oscillators: Behzad RazaviDocument13 pagesA Study of Phase Noise in CMOS Oscillators: Behzad RazaviraveendraNo ratings yet
- The Delta-Sigma Modulator: A Circuit For All SeasonsDocument6 pagesThe Delta-Sigma Modulator: A Circuit For All SeasonsSohaib AkhtarNo ratings yet
- AN10062 Phase Noise Measurement Guide For OscillatorsDocument16 pagesAN10062 Phase Noise Measurement Guide For Oscillatorspranan100% (1)
- Active AntennasDocument4 pagesActive AntennasGuillermo Avila Elizondo100% (1)
- Signal Chain Basics#71Document5 pagesSignal Chain Basics#71UziNo ratings yet
- Communication Theory Question Bank Unit 4Document2 pagesCommunication Theory Question Bank Unit 4muthubeNo ratings yet
- Nichols Chart IESLDocument14 pagesNichols Chart IESLBatuhan Mutlugil 'Duman'No ratings yet
- Basics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and AbidiDocument9 pagesBasics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and Abidiamr khaledNo ratings yet
- Phase Noise Effects and Mitigation Techniques: Roberto Corvaja and Ana García ArmadaDocument248 pagesPhase Noise Effects and Mitigation Techniques: Roberto Corvaja and Ana García Armadahasan doganNo ratings yet
- Abstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheDocument11 pagesAbstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheMarkoCimbaljevicNo ratings yet
- UNIT-5 Review of Probability and Random ProcessDocument21 pagesUNIT-5 Review of Probability and Random ProcessAkshat MehrotraNo ratings yet
- Chapter 10 PDFDocument26 pagesChapter 10 PDFPugazhendhi MuthuNo ratings yet
- Building and Room Acoustics Measurements With Sine-Sweep TechniqueDocument2 pagesBuilding and Room Acoustics Measurements With Sine-Sweep Techniquejabeur rahmaNo ratings yet
- Project Lockin AmplifierDocument25 pagesProject Lockin AmplifierHrivu Dasmunshi (RA1911004010566)No ratings yet
- Dynamical Decoupling With Tailored Waveplates For Long Distance Communication Using Polarization QubitsDocument8 pagesDynamical Decoupling With Tailored Waveplates For Long Distance Communication Using Polarization QubitsCambiador de MundoNo ratings yet
- Modulation FM Sur Labview by Ameur1990Document13 pagesModulation FM Sur Labview by Ameur1990Ameur HEDHLINo ratings yet
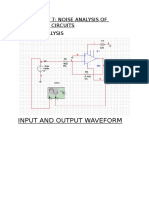
- Input and Output Waveform: Experiment 7: Noise Analysis of Electronic Circuits A.Noise AnalysisDocument7 pagesInput and Output Waveform: Experiment 7: Noise Analysis of Electronic Circuits A.Noise AnalysisSukumar SamalNo ratings yet
- Lab 03 - Seismic Noise AttenuationDocument5 pagesLab 03 - Seismic Noise Attenuationapi-323770220No ratings yet
- Transmission Loss (Duct Acoustics)Document4 pagesTransmission Loss (Duct Acoustics)신동호No ratings yet
- Teori Dasar SeismikDocument8 pagesTeori Dasar SeismikTumpal NainggolanNo ratings yet
- Noise Optimization of An Inductively Degenerated CMOS Low Noise Amplifier PDFDocument7 pagesNoise Optimization of An Inductively Degenerated CMOS Low Noise Amplifier PDFDhaivat BhattNo ratings yet
- NOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksDocument13 pagesNOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksengrkskNo ratings yet
- Lab Experiment 7: Introduction To Bode Plots, Phase and Gain MarginDocument12 pagesLab Experiment 7: Introduction To Bode Plots, Phase and Gain MarginFahad AneebNo ratings yet
- Electrical EngineeringDocument20 pagesElectrical EngineeringLuke WangNo ratings yet
- Etsi Ep Bran 3ERI074a: Source: Jonas Medbo, Ericsson Radio SystemsDocument9 pagesEtsi Ep Bran 3ERI074a: Source: Jonas Medbo, Ericsson Radio SystemsNarendra DecondaNo ratings yet
- Filters Active Passive N Switched CapacitorDocument24 pagesFilters Active Passive N Switched Capacitorgotti45No ratings yet
- NDA Previous Year Questions BINOMIAL THEOREMDocument46 pagesNDA Previous Year Questions BINOMIAL THEOREMRaman ChoubayNo ratings yet
- Sni 4810 2013Document36 pagesSni 4810 2013Muh RoqiNo ratings yet
- Konversi Satuan Ke Satuan Yang LainnyaDocument14 pagesKonversi Satuan Ke Satuan Yang Lainnyadwi anggraeniNo ratings yet
- 08 Chapter 2Document61 pages08 Chapter 2Vivek BelaNo ratings yet
- Agencias CodDocument279 pagesAgencias Codjoanvera20No ratings yet
- Analysis of Beams and Compound BeamsDocument4 pagesAnalysis of Beams and Compound BeamsMangesh kevadkarNo ratings yet
- Electrical Distribution Systems DOC1Document25 pagesElectrical Distribution Systems DOC1Ravi TejaNo ratings yet
- Ringo Axial ValvesDocument20 pagesRingo Axial ValvesRIGOBERTO PONCENo ratings yet
- School Based Assessment 2022 GRADE 4 (Section-A) MATHEMATICS PART - B (Subjective Type)Document6 pagesSchool Based Assessment 2022 GRADE 4 (Section-A) MATHEMATICS PART - B (Subjective Type)Muhammad ImranNo ratings yet
- 80 20 Internal Bond TesterDocument4 pages80 20 Internal Bond TesterHazeq AzaharNo ratings yet
- RSRP RSRQ RssiDocument10 pagesRSRP RSRQ RssiNeelabh Krishna100% (6)
- Nicholson - Guide To Filing 2014Document14 pagesNicholson - Guide To Filing 2014crm102b100% (1)
- 1 0 Introduction To Physical Geodesy 2012 PDFDocument50 pages1 0 Introduction To Physical Geodesy 2012 PDFAfif FarhanNo ratings yet
- TeleDNA SMSC Acceptance Test Plan UnitechDocument30 pagesTeleDNA SMSC Acceptance Test Plan Unitechankush_apjNo ratings yet
- 1/22/13 12:01 PM C:/Users/Sol... /uwb - SV - Model - CT - 15 - 4a.m 1 of 3Document3 pages1/22/13 12:01 PM C:/Users/Sol... /uwb - SV - Model - CT - 15 - 4a.m 1 of 3Solo NunooNo ratings yet
- Oracle® Goldengate: Microsoft SQL Server Installation and Setup GuideDocument53 pagesOracle® Goldengate: Microsoft SQL Server Installation and Setup GuideutpalbasakNo ratings yet
- HF13Document122 pagesHF13HonoluluNo ratings yet
- Trend Surface AnalysisDocument42 pagesTrend Surface Analysisরুবিয়াস হ্যাগ্রিডNo ratings yet
- REST JavaDocument84 pagesREST JavaKhalid SaffouryNo ratings yet
- Siemens 1FT SimoDrive Servo Motor Planning Guide PDFDocument632 pagesSiemens 1FT SimoDrive Servo Motor Planning Guide PDFswooshcmk100% (1)
- MAT102b PDFDocument4 pagesMAT102b PDFMonash MongerNo ratings yet
- String Handling InstructionsDocument7 pagesString Handling Instructionskarim mohamedNo ratings yet
- Develop A Menu Driven Program To Animate A Flag Using Bezier Curve AlgorithmDocument4 pagesDevelop A Menu Driven Program To Animate A Flag Using Bezier Curve AlgorithmDhyan MohanNo ratings yet
- Mass Spring SystemDocument25 pagesMass Spring SystemKhoironSyamdatuNo ratings yet
- Cambridge IGCSE™: Information & Communication Technology 0417/02 October/November 2021Document17 pagesCambridge IGCSE™: Information & Communication Technology 0417/02 October/November 2021EffNo ratings yet
- 3 3-CapacitorsDocument28 pages3 3-CapacitorsRei SobretodoNo ratings yet
- Simple MixturesDocument37 pagesSimple Mixturesumair35No ratings yet
- Math Lesson Plan Elapsed TimeDocument11 pagesMath Lesson Plan Elapsed Timekanica785No ratings yet