Download as pdf or txt
You might also like
- Biosignal and Medical Image Processing 3rd Semmlow Solution ManualDocument24 pagesBiosignal and Medical Image Processing 3rd Semmlow Solution ManualCherylElliottbifg98% (49)
- Effects of Stator Vanes On Power Coefficients of A Zephyr Vertical Axis Wind TurbineDocument9 pagesEffects of Stator Vanes On Power Coefficients of A Zephyr Vertical Axis Wind TurbineTim White100% (1)
- 302-Batista 1Document7 pages302-Batista 1ahmed belalNo ratings yet
- Strategy For Mitigating Wake Interference Between Offshore Vertical-Axis Wind Turbines Evaluation of Vertically Staggered ArrangementDocument20 pagesStrategy For Mitigating Wake Interference Between Offshore Vertical-Axis Wind Turbines Evaluation of Vertically Staggered ArrangementNgh lfouxNo ratings yet
- Effect of PartialDocument12 pagesEffect of PartialNida AkNo ratings yet
- Energies: Bio-Inspired Rotor Design Characterization of A Horizontal Axis Wind TurbineDocument22 pagesEnergies: Bio-Inspired Rotor Design Characterization of A Horizontal Axis Wind TurbineFransisco JeremyNo ratings yet
- 1-S2.0-S2213138822007792-Main BEESRGDocument12 pages1-S2.0-S2213138822007792-Main BEESRGMuhammad YanuarNo ratings yet
- New Blade Profile For Darrieus Wind TurbinesDocument5 pagesNew Blade Profile For Darrieus Wind Turbinesأحمد إبراهيم شواربNo ratings yet
- Energies 08 10684Document34 pagesEnergies 08 10684Alejandro Vasquez TorresNo ratings yet
- Rocha Et Al - 2018 - The Effects of Blade Pitch Angle On The Performance of Small-Scale Wind TurbineDocument10 pagesRocha Et Al - 2018 - The Effects of Blade Pitch Angle On The Performance of Small-Scale Wind TurbinedcrazevedoNo ratings yet
- Thesis On Wind Turbine DesignDocument8 pagesThesis On Wind Turbine Designjqcoplhld100% (2)
- Implications of Biofouling On Cross Flow Turbine PerformanceDocument13 pagesImplications of Biofouling On Cross Flow Turbine PerformanceAbdul wahid ButtNo ratings yet
- Energy: Bruno A. Storti, Jonathan J. Dorella, Nadia D. Roman, Ignacio Peralta, Alejandro E. AlbanesiDocument18 pagesEnergy: Bruno A. Storti, Jonathan J. Dorella, Nadia D. Roman, Ignacio Peralta, Alejandro E. AlbanesiMayra ZezattiNo ratings yet
- Performance of A Contra-Rotating Small Wind Energy ConverterDocument25 pagesPerformance of A Contra-Rotating Small Wind Energy ConverterSukhoiLoverNo ratings yet
- 1 s2.0 S096014812101418X MainDocument28 pages1 s2.0 S096014812101418X MainZero Shinny ChoiNo ratings yet
- Offshore Vertical Axis Wind Turbine Simulation: Freddie & Kumaresan CundenDocument18 pagesOffshore Vertical Axis Wind Turbine Simulation: Freddie & Kumaresan CundenKumaresan CundenNo ratings yet
- An Experiemtnal Study On The Aerodynamic Performances and Wake Characteristics of An Innovative Dual Rotor Wind TurbineDocument16 pagesAn Experiemtnal Study On The Aerodynamic Performances and Wake Characteristics of An Innovative Dual Rotor Wind TurbinePaulNo ratings yet
- 1 s2.0 S1110016821001381 MainDocument14 pages1 s2.0 S1110016821001381 MainKarthik JNo ratings yet
- Renewable Energy: M.C. Verbeek, R.J. Labeur, W.S.J. UijttewaalDocument12 pagesRenewable Energy: M.C. Verbeek, R.J. Labeur, W.S.J. UijttewaalAhmad YaniNo ratings yet
- Análise de Cenários para Repotenciamento de Parques Eólicos No BrasilDocument14 pagesAnálise de Cenários para Repotenciamento de Parques Eólicos No BrasilEMMANUELLE CARNEIRO DE MESQUITANo ratings yet
- Evaluation of Tip Loss Corrections To ADNS SimulatDocument21 pagesEvaluation of Tip Loss Corrections To ADNS SimulatPharlin MédardNo ratings yet
- Improving Vertical Axis Wind Turbine (VAWT) PerformanceDocument12 pagesImproving Vertical Axis Wind Turbine (VAWT) PerformanceNazlı Aslıcan WodzinskiNo ratings yet
- A Double-Multiple Straemtube Model For Vertical Axis Wind Turbine of Arbitary Rotor LoadingDocument10 pagesA Double-Multiple Straemtube Model For Vertical Axis Wind Turbine of Arbitary Rotor Loadinghuy4ngooNo ratings yet
- Ris R 1331Document81 pagesRis R 1331Googe ReviewerNo ratings yet
- A Comparison of Extreme Structural Responses andDocument39 pagesA Comparison of Extreme Structural Responses andWinggi ArfaNo ratings yet
- Numerical Modelling and Optimization of Vertical Axis Wind Turbine Pairs A Scale Up ApproachDocument11 pagesNumerical Modelling and Optimization of Vertical Axis Wind Turbine Pairs A Scale Up ApproachBreardNo ratings yet
- CILAMCE2019 - Martinho v3.Pt - enDocument13 pagesCILAMCE2019 - Martinho v3.Pt - engmattosgNo ratings yet
- Energy and Exergy Efficiency ComparisonDocument12 pagesEnergy and Exergy Efficiency ComparisonEfrain ValleNo ratings yet
- Solidity, Blade Profile, Pitch Angle, Surface RoughnessDocument16 pagesSolidity, Blade Profile, Pitch Angle, Surface Roughnesssenermehmet01No ratings yet
- Wind Plant Power Optimization Through Yaw Control Using A Parametric Model For Wake Effects - A CFD Simulation StudyDocument20 pagesWind Plant Power Optimization Through Yaw Control Using A Parametric Model For Wake Effects - A CFD Simulation Studyaredo3779No ratings yet
- Literature Review On Vertical Axis Wind TurbineDocument4 pagesLiterature Review On Vertical Axis Wind Turbineaflsodoam100% (1)
- Wind TurbinethesispdfDocument6 pagesWind TurbinethesispdfWhatAreTheBestPaperWritingServicesUK100% (2)
- Energies 09 00324Document27 pagesEnergies 09 00324Fahmy ArdhiansyahNo ratings yet
- Drag WT 2Document16 pagesDrag WT 2Subhash JhurawatNo ratings yet
- Computational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineDocument9 pagesComputational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineFAZAL ELLAHINo ratings yet
- Dissertation Offshore Wind EnergyDocument8 pagesDissertation Offshore Wind EnergyBestOnlinePaperWritingServiceCanada100% (1)
- CFD Modelling and Prototype Testing of A Vertical Axis Wind Turbines in Planetary Cluster FormationDocument8 pagesCFD Modelling and Prototype Testing of A Vertical Axis Wind Turbines in Planetary Cluster FormationHaposanNo ratings yet
- A Direct Vector Control Based On Modified SMC Theory To Control TheDocument10 pagesA Direct Vector Control Based On Modified SMC Theory To Control TheemadNo ratings yet
- Impacts of Gurney Flap and Solidity On The Aerodynamic Performance of Vertical Axis Wind Turbines in Array ConfigurationsDocument15 pagesImpacts of Gurney Flap and Solidity On The Aerodynamic Performance of Vertical Axis Wind Turbines in Array ConfigurationsOmer Ghassan Abdulkareem Hassan AlsultanNo ratings yet
- 2014 Devriendt - Monitoring Resonant Frequencies and Damping Values of An Offshore Wind TurbineDocument10 pages2014 Devriendt - Monitoring Resonant Frequencies and Damping Values of An Offshore Wind TurbineMarcus Girão de MoraisNo ratings yet
- Numerical and Experimental Investigation of The Effect of A Circular Cylinder As Passive Control On The Savonius Wind Turbine PerformanceDocument21 pagesNumerical and Experimental Investigation of The Effect of A Circular Cylinder As Passive Control On The Savonius Wind Turbine PerformanceGunawwan ZakktiNo ratings yet
- Wind Turbine Condition Assessment Through Power Curve Copula ModelingDocument8 pagesWind Turbine Condition Assessment Through Power Curve Copula ModelingBogdan VicolNo ratings yet
- Master Thesis Wind EnergyDocument5 pagesMaster Thesis Wind Energyfjda52j0100% (1)
- Machines: A Study of The Impact of Pitch Misalignment On Wind Turbine PerformanceDocument13 pagesMachines: A Study of The Impact of Pitch Misalignment On Wind Turbine PerformanceMoroko69No ratings yet
- Energy: K.M. Almohammadi, D.B. Ingham, L. Ma, M. PourkashanDocument11 pagesEnergy: K.M. Almohammadi, D.B. Ingham, L. Ma, M. PourkashanDanish AbbasNo ratings yet
- Power Capture Performance of A Heaving Wave Energy Converter For Varying B /B RatioDocument10 pagesPower Capture Performance of A Heaving Wave Energy Converter For Varying B /B RatioĐạt Tạ ThànhNo ratings yet
- Optimal Placement of Wind Turbines in Wind Farm Layout Using Particle Swarm OptimizationDocument9 pagesOptimal Placement of Wind Turbines in Wind Farm Layout Using Particle Swarm Optimizationwtony0081No ratings yet
- Critical Issues in The CFD Simulation of Darrieus Wind TurbinesDocument17 pagesCritical Issues in The CFD Simulation of Darrieus Wind TurbinesDanny MoyanoNo ratings yet
- Wind Turbine Blade Design ThesisDocument5 pagesWind Turbine Blade Design Thesissandrawoodtopeka100% (2)
- Emerging Trends in Vibration Control of Wind Turbines: A Focus On A Dual Control StrategyDocument16 pagesEmerging Trends in Vibration Control of Wind Turbines: A Focus On A Dual Control StrategyNagaraju DanduNo ratings yet
- Performance Assessment and Optimization of A Helical Savonius Wind Turbine by Modifying The Bach's SectionDocument11 pagesPerformance Assessment and Optimization of A Helical Savonius Wind Turbine by Modifying The Bach's SectionARIANNE PALOMINO CAMACNo ratings yet
- Göltenbott, U., Ohya, Y., Yoshida, S., & Jamieson, P. (2017) - Aerodynamic Interaction of Diffuser Augmented Wind Turbines in Multi-Rotor Systems. Renewable Energy, 112, 25-34.Document10 pagesGöltenbott, U., Ohya, Y., Yoshida, S., & Jamieson, P. (2017) - Aerodynamic Interaction of Diffuser Augmented Wind Turbines in Multi-Rotor Systems. Renewable Energy, 112, 25-34.anthonyNo ratings yet
- MAG LEVintroductionDocument3 pagesMAG LEVintroductionlance galorportNo ratings yet
- A Numerical Study of The Effects of Wind Direction On TurbineDocument17 pagesA Numerical Study of The Effects of Wind Direction On TurbineIqbal MeskinzadaNo ratings yet
- Cobem 2017 2660Document11 pagesCobem 2017 2660Luiz Justino da Silva JuniorNo ratings yet
- The Design, Simulation and Testing of An Urban Vertical Axis Wind TurbineDocument9 pagesThe Design, Simulation and Testing of An Urban Vertical Axis Wind Turbinesenermehmet01No ratings yet
- Wind Energy Conversion System For Electrical Power Generation in UNIPORT and UPTH, Port Harcourt, Rivers State, NigeriaDocument12 pagesWind Energy Conversion System For Electrical Power Generation in UNIPORT and UPTH, Port Harcourt, Rivers State, Nigeriamanikandan.vNo ratings yet
- 45-Article Text-164-2-10-20230402Document6 pages45-Article Text-164-2-10-20230402hakim.elhoujajiNo ratings yet
- eSTRUCT - E Newsletter of CSIR-SERCDocument14 pageseSTRUCT - E Newsletter of CSIR-SERCMymoon MoghulNo ratings yet
- Wave and Tidal EnergyFrom EverandWave and Tidal EnergyDeborah GreavesNo ratings yet
- Proceedings of the 6th International Workshop on Hydro Scheduling in Competitive Electricity MarketsFrom EverandProceedings of the 6th International Workshop on Hydro Scheduling in Competitive Electricity MarketsArild HelsethNo ratings yet
- Generalization of Non Destructive Damage EvaluatioDocument8 pagesGeneralization of Non Destructive Damage EvaluatioSérgio CustódioNo ratings yet
- Damage Detection of Pile Foundations in Marine Engineering Based On A Multidimensional Dynamic SignatureDocument13 pagesDamage Detection of Pile Foundations in Marine Engineering Based On A Multidimensional Dynamic SignatureSérgio CustódioNo ratings yet
- Nick-Aziminejad2021 Article Vibration-BasedDamageIdentificDocument22 pagesNick-Aziminejad2021 Article Vibration-BasedDamageIdentificSérgio CustódioNo ratings yet
- Engineering Structures: Jingzhou Xin, Yan Jiang, Jianting Zhou, Liuliu Peng, Shuoyu Liu, Qizhi TangDocument16 pagesEngineering Structures: Jingzhou Xin, Yan Jiang, Jianting Zhou, Liuliu Peng, Shuoyu Liu, Qizhi TangSérgio CustódioNo ratings yet
- Tang2020 Article AutoregressiveModel-BasedStrucDocument13 pagesTang2020 Article AutoregressiveModel-BasedStrucSérgio CustódioNo ratings yet
- Applied Sciences: Fficients As Ffective Structural Health Monitoring ToolDocument28 pagesApplied Sciences: Fficients As Ffective Structural Health Monitoring ToolSérgio CustódioNo ratings yet
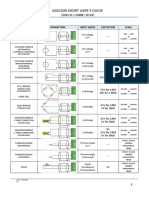
- Ads1500 Short User S Guide: Sensor ConnectionsDocument6 pagesAds1500 Short User S Guide: Sensor ConnectionsSérgio CustódioNo ratings yet
- Kahya2021 Article DamageLocalizationInLaminatedCDocument13 pagesKahya2021 Article DamageLocalizationInLaminatedCSérgio CustódioNo ratings yet
- Structural Contr HLTH - 2018 - Ni - Time Varying System Identification Using Variational Mode DecompositionDocument20 pagesStructural Contr HLTH - 2018 - Ni - Time Varying System Identification Using Variational Mode DecompositionSérgio CustódioNo ratings yet
- Mod 6Document104 pagesMod 6Sérgio CustódioNo ratings yet
- Bridge-Condition Assessment by Modal Flexibility: by T. Toksoy and A.E. AktanDocument8 pagesBridge-Condition Assessment by Modal Flexibility: by T. Toksoy and A.E. AktanSérgio CustódioNo ratings yet
- BMV Iabmas2012 2792-2799Document9 pagesBMV Iabmas2012 2792-2799Sérgio CustódioNo ratings yet
- Permanent Magnet Vibration Systems: System DataDocument4 pagesPermanent Magnet Vibration Systems: System DataSérgio CustódioNo ratings yet
- Sensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataDocument17 pagesSensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataSérgio CustódioNo ratings yet
- 16/12/18 13:26 C:/Users/Usuario/Onedr... /Iso8041Weight.M 1 of 1Document1 page16/12/18 13:26 C:/Users/Usuario/Onedr... /Iso8041Weight.M 1 of 1Sérgio CustódioNo ratings yet
- Linux Extending Your DiskDocument7 pagesLinux Extending Your DiskBenNo ratings yet
- BS 1873-2 - 1997Document14 pagesBS 1873-2 - 1997RAKESH ANABNo ratings yet
- Calculus Unit 1 TestDocument5 pagesCalculus Unit 1 TestDynafrom100% (7)
- 2020 ST Hilda SA2Document28 pages2020 ST Hilda SA2AlexisNo ratings yet
- Classification of Computers MCQ QuestionsDocument18 pagesClassification of Computers MCQ QuestionsSuresh Khanal100% (5)
- Excel Applescript Save As PDFDocument2 pagesExcel Applescript Save As PDFSarahNo ratings yet
- II. 8 .2 Alat Laboratorium 2Document290 pagesII. 8 .2 Alat Laboratorium 2085270710307No ratings yet
- Basin Modelling in The Mahakam Delta Based On TheDocument21 pagesBasin Modelling in The Mahakam Delta Based On TheMartyson Yudha Prawira100% (1)
- CetexamnoticeDocument22 pagesCetexamnoticevandanakodan6No ratings yet
- Section 23 - Floco 382 and 383 MetersDocument24 pagesSection 23 - Floco 382 and 383 MetershammamiNo ratings yet
- Comparison of 4 Different Flow Control Methods of PumpsDocument5 pagesComparison of 4 Different Flow Control Methods of PumpsmatanveerNo ratings yet
- Energy Absorption of Safety Nets in Building ConstructionDocument9 pagesEnergy Absorption of Safety Nets in Building ConstructionJorge ChavezNo ratings yet
- Specific HeatDocument12 pagesSpecific Heatlubuguin3230272No ratings yet
- P&Id P&ID P&Id P&Id Piping & Instrument Diagram Piping & Instrument Diagram PG G PG GDocument23 pagesP&Id P&ID P&Id P&Id Piping & Instrument Diagram Piping & Instrument Diagram PG G PG GAmirNo ratings yet
- Insar Tutorial With NESTDocument100 pagesInsar Tutorial With NESTAdito MaulanaNo ratings yet
- Test Certificate For Vista Superplast Hs 400 Consignee: Dhariwal Buildtech Ltd. Quantity: 22.022 MT Date: 14-12-2022 Batch No.: VK/2022-23/228Document1 pageTest Certificate For Vista Superplast Hs 400 Consignee: Dhariwal Buildtech Ltd. Quantity: 22.022 MT Date: 14-12-2022 Batch No.: VK/2022-23/228Deepak PachauriaNo ratings yet
- Shape FunctionDocument2 pagesShape Functionsai100% (1)
- Iodine-Thiosulphate TitrationsDocument1 pageIodine-Thiosulphate Titrationsmparks05No ratings yet
- ScreeningDocument33 pagesScreeningPrincess Aibby CatalanNo ratings yet
- Lean To WeldingDocument10 pagesLean To Weldingkarthiks12008658No ratings yet
- Fluids 2Document45 pagesFluids 2FERNANDEZ, CLARENCE JADE R.No ratings yet
- A Biomechanical Perspective On Bone QualityDocument9 pagesA Biomechanical Perspective On Bone QualityXiao YangNo ratings yet
- Boeing B737Document96 pagesBoeing B737Amjad Baig100% (6)
- Contemporary All-Ceramic Fixed Partial Dentures: A Review: Ariel J. Raigrodski, DMD, MSDocument14 pagesContemporary All-Ceramic Fixed Partial Dentures: A Review: Ariel J. Raigrodski, DMD, MSNiaz AhammedNo ratings yet
- Oracle DataGuard Documentation PDFDocument45 pagesOracle DataGuard Documentation PDFLuis Alberto MadridNo ratings yet
- Advant Controller 160Document4 pagesAdvant Controller 160BMNo ratings yet
- Final PPT g6Document36 pagesFinal PPT g6Random PersonNo ratings yet
- DPS 2100 Engine Safety System User Manual Doc. No. 921.450.021Document84 pagesDPS 2100 Engine Safety System User Manual Doc. No. 921.450.021_Avek_89% (9)
- Bobbin Change Analysis and Possible SolutionsDocument21 pagesBobbin Change Analysis and Possible SolutionsSharvari ShankarNo ratings yet