Download as pdf or txt
You might also like
- MINI Cooper R55 R56 R57 Service Manual 2007 2011 Table of Contents PDFDocument2 pagesMINI Cooper R55 R56 R57 Service Manual 2007 2011 Table of Contents PDFRogério Moreno0% (2)
- Trefethen BauDocument29 pagesTrefethen BauHari Haran100% (1)
- Kiln Inlet Section Casting Procedure (LAFARGE)Document8 pagesKiln Inlet Section Casting Procedure (LAFARGE)Nael100% (3)
- Unit 3 SolvedDocument13 pagesUnit 3 SolvedSHAHUL HAMEED.SNo ratings yet
- D 2840 Le 403Document70 pagesD 2840 Le 403Erald TheBlue100% (2)
- Introduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)Document5 pagesIntroduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)علي كامل الاسديNo ratings yet
- Identification of Crack Location in A Rotor-Bearing System Using Wavelet TransformsDocument7 pagesIdentification of Crack Location in A Rotor-Bearing System Using Wavelet TransformsJoel Morales PerezNo ratings yet
- Chapter 4 PDFDocument11 pagesChapter 4 PDF김채현No ratings yet
- Department of Electronics and Telecommunication Engineering: R T R T TDocument3 pagesDepartment of Electronics and Telecommunication Engineering: R T R T TSurangaGNo ratings yet
- Mathematical Model of DC Motor For Analysis of Commutation ProcessesDocument4 pagesMathematical Model of DC Motor For Analysis of Commutation ProcessesMadarwi SarwaNo ratings yet
- Inverse KinematicsDocument64 pagesInverse KinematicsHoney RathoreNo ratings yet
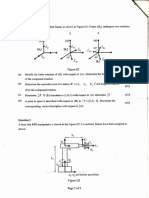
- R Rotation: Frames Shown Shown Attains UndergoesDocument3 pagesR Rotation: Frames Shown Shown Attains UndergoesSurangaGNo ratings yet
- Control 2Document11 pagesControl 2utkuNo ratings yet
- ComputerGraphics 3D Part2Document100 pagesComputerGraphics 3D Part2api-3799599No ratings yet
- Kinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli CaoDocument4 pagesKinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli Caoसन्तोस दाहालNo ratings yet
- Single Axis Text I J Mic 08075 FinalDocument26 pagesSingle Axis Text I J Mic 08075 Finalali almorsedNo ratings yet
- Week 4Document52 pagesWeek 4Finto RaphelNo ratings yet
- Robotics LabDocument10 pagesRobotics LabAbdul Moiz QarniNo ratings yet
- E186Document2 pagesE186asit kumarNo ratings yet
- Assignment Linear AlgebraDocument81 pagesAssignment Linear AlgebraOl SreylinNo ratings yet
- Robotics (17ME2504A) Unit IV Manipulator KinematicsDocument32 pagesRobotics (17ME2504A) Unit IV Manipulator KinematicsNani PusuluriNo ratings yet
- EE 222 Course ProjectDocument5 pagesEE 222 Course ProjectInsaf HamdiNo ratings yet
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- Instructions: R A R A A RDocument3 pagesInstructions: R A R A A RanhhaikimdongNo ratings yet
- Inverse Kinematics-3Document51 pagesInverse Kinematics-3Nahom AlemnewNo ratings yet
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocument7 pagesThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNo ratings yet
- Solution 2Document5 pagesSolution 2Paulina MarquezNo ratings yet
- Ce 402Document2 pagesCe 402Shayan AbagnaleNo ratings yet
- Exam RT2 2018 WinterDocument16 pagesExam RT2 2018 WinterLuis CarvalhoNo ratings yet
- Project #3, Part 2 Animating The Juice Extractor LinkageDocument8 pagesProject #3, Part 2 Animating The Juice Extractor LinkageusamaNo ratings yet
- Oe Been OscDocument13 pagesOe Been Oscdarex77No ratings yet
- Scararobot 2Document6 pagesScararobot 2Thắng LêNo ratings yet
- Airways - Multilateration Phase I Gen PDFDocument18 pagesAirways - Multilateration Phase I Gen PDFmavv5455No ratings yet
- W11L2Document10 pagesW11L2Venkat ReddiNo ratings yet
- Modeling and Simulation of A Moving Robot Arm Mounted On WheelchairDocument5 pagesModeling and Simulation of A Moving Robot Arm Mounted On WheelchairM Rameez Ur RehmanNo ratings yet
- Chapter 3Document4 pagesChapter 3inesboumaiza293No ratings yet
- Chapter 5 PDFDocument9 pagesChapter 5 PDF김채현No ratings yet
- 2016 PaperDocument6 pages2016 PaperLuke HoganNo ratings yet
- Entrepreneurship and marketing chapter 12 Lec#29Document19 pagesEntrepreneurship and marketing chapter 12 Lec#29ahmadnaeemman330No ratings yet
- Mathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringDocument33 pagesMathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringJohn SmithNo ratings yet
- θ; and the externally applied torque T (t) - We findDocument11 pagesθ; and the externally applied torque T (t) - We findRau Lance CunananNo ratings yet
- JUAS 2019 - Tutorial 2: 1.) S-ParametersDocument6 pagesJUAS 2019 - Tutorial 2: 1.) S-Parameterssultan1786No ratings yet
- Position Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksDocument12 pagesPosition Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksminhkhoaNo ratings yet
- 1 Stanford Manipulator - First Three Joints: CS 4733, Class Notes: Forward Kinematics IIDocument4 pages1 Stanford Manipulator - First Three Joints: CS 4733, Class Notes: Forward Kinematics IIYoussri Ben MoussaNo ratings yet
- Robotics1 11.02.03Document4 pagesRobotics1 11.02.03Ammar BendjeddouNo ratings yet
- BMS College of Engineering, Bangalore-560019: June 2017 Semester End Make Up ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: June 2017 Semester End Make Up Examinationskoushik bhatNo ratings yet
- Lecture 06 - AC Machinery FundamentalsDocument38 pagesLecture 06 - AC Machinery FundamentalsspiderhuntNo ratings yet
- Battiato Gastaldi FEM ReportDocument39 pagesBattiato Gastaldi FEM ReportChiara GastaldiNo ratings yet
- 3 Analytical Kinematics PDFDocument13 pages3 Analytical Kinematics PDF27AlokKumarNo ratings yet
- Controller Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Document15 pagesController Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Nesibe Nur ÇamNo ratings yet
- B. Sc. Honours Degree Civil Engineering: Sri Lanka Institute of Information TechnologyDocument3 pagesB. Sc. Honours Degree Civil Engineering: Sri Lanka Institute of Information TechnologySithmi AmarathungaNo ratings yet
- EX0304Document2 pagesEX0304igualdi53No ratings yet
- A Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersDocument12 pagesA Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersmcamhkNo ratings yet
- Ume805 2Document2 pagesUme805 2Raunaq SinghNo ratings yet
- Es386 2017Document7 pagesEs386 2017Luke HoganNo ratings yet
- B/ Set Coordinate Frames For The First Four Links (Link 0, Link 1, ., Link 3)Document5 pagesB/ Set Coordinate Frames For The First Four Links (Link 0, Link 1, ., Link 3)thanh thoiNo ratings yet
- Instructions: R A R A A RDocument3 pagesInstructions: R A R A A RanhhaikimdongNo ratings yet
- Trigonometry and LogarithmDocument8 pagesTrigonometry and LogarithmbjNo ratings yet
- Forward and Inverse Kinematics of A 6DOF RobotDocument14 pagesForward and Inverse Kinematics of A 6DOF RobotUchenna Ezeobi100% (2)
- Mobile Robotics Lecture No. 5Document72 pagesMobile Robotics Lecture No. 5ZaidKhanNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Lecture Notes 12Document26 pagesLecture Notes 12tnvishNo ratings yet
- Rtad 085Document84 pagesRtad 085Omar Piña100% (1)
- Slot Diffuser: Type VSD35-VarysetDocument19 pagesSlot Diffuser: Type VSD35-VarysetIvanNo ratings yet
- Catalog of ZCJK Popular Brick Making MachineDocument3 pagesCatalog of ZCJK Popular Brick Making MachineDunstanNo ratings yet
- Introduction To Architectural TechnologyDocument3 pagesIntroduction To Architectural TechnologyDaffa AlweeNo ratings yet
- Pulsafeeder OMNI DC2-DC6 Pump Manual PDFDocument46 pagesPulsafeeder OMNI DC2-DC6 Pump Manual PDFRoberto MejiaNo ratings yet
- C22246 CRVpro Brochure 210x297 EN To EMEA Sept 2017 WEB PDFDocument6 pagesC22246 CRVpro Brochure 210x297 EN To EMEA Sept 2017 WEB PDFAlejandro Antonio GalindoNo ratings yet
- ISO Falk Metric Key KeywayDocument2 pagesISO Falk Metric Key KeywayImran KhanNo ratings yet
- Proinert Agent Storage Cylinders For Ig-55Document3 pagesProinert Agent Storage Cylinders For Ig-55Mohammed SbeitanNo ratings yet
- Yamaha XT 225 Catalogo Partes 4BE7 - 1994Document55 pagesYamaha XT 225 Catalogo Partes 4BE7 - 1994Diego RueschNo ratings yet
- TE260HT - (10Kw - 1357Nm)Document2 pagesTE260HT - (10Kw - 1357Nm)rolandNo ratings yet
- Lab Report 6 Saaim Ahmed - 417524Document9 pagesLab Report 6 Saaim Ahmed - 417524Zain AhmedNo ratings yet
- ETABS Shear Wall DesignDocument2 pagesETABS Shear Wall DesignMihai CalinNo ratings yet
- Keihin PE CarburatorDocument2 pagesKeihin PE CarburatorGagibitNo ratings yet
- Tests in CRM LaboratoryDocument2 pagesTests in CRM Laboratorysatish_trivediNo ratings yet
- DV8R G3 G4flexisparepartmanualDocument107 pagesDV8R G3 G4flexisparepartmanualVlad PopescuNo ratings yet
- Hitachi-ZW180-220-250-ZX310-Wheel-Loader-Technical Operation-ManualDocument374 pagesHitachi-ZW180-220-250-ZX310-Wheel-Loader-Technical Operation-ManualXuan Man Nguyen100% (1)
- MT3493 Question Bank - MechDocument34 pagesMT3493 Question Bank - Mechmohan kumarNo ratings yet
- Structural Concrete - 2013 - Di Prisco - Fibre Reinforced Concrete in Fib Model Code 2010 Principles Models and TestDocument20 pagesStructural Concrete - 2013 - Di Prisco - Fibre Reinforced Concrete in Fib Model Code 2010 Principles Models and TestLeonardoNo ratings yet
- Y61 CRD X Sm7e-Y61kg1 FeDocument2 pagesY61 CRD X Sm7e-Y61kg1 FeDaniel BruceNo ratings yet
- 160m Hyd TroubleshootDocument8 pages160m Hyd TroubleshootDaniel Rhasty-ghee AhmanorNo ratings yet
- Rolling PDFDocument14 pagesRolling PDFNkongho JohnsonNo ratings yet
- Turbin AnginDocument30 pagesTurbin AnginDaryAntoNo ratings yet
- Chapter 1:types of Flow in Open ChannelDocument61 pagesChapter 1:types of Flow in Open ChannelHani BarjokNo ratings yet
- RC Geas 6Document7 pagesRC Geas 6John Lester Laurentino RamirezNo ratings yet
- BA 1404 en 1000164553Document142 pagesBA 1404 en 1000164553Alberto100% (1)
- Notes: General Steel Fabrication Notes: Carbon Steel Fabrication Notes: Stainless Steel FabricationDocument6 pagesNotes: General Steel Fabrication Notes: Carbon Steel Fabrication Notes: Stainless Steel FabricationAquiles MartinezNo ratings yet