Download as pdf or txt
You might also like
- Digital Image Processing Notes PDFDocument139 pagesDigital Image Processing Notes PDFRaja Sekhar100% (5)
- Application Integration Framework (AIF) BizTalk Adapter Configuration For Data ExchangeDocument117 pagesApplication Integration Framework (AIF) BizTalk Adapter Configuration For Data ExchangeoneloveuserNo ratings yet
- Digital Image Processing-MHKDocument104 pagesDigital Image Processing-MHKHari Krishna MusunooriNo ratings yet
- AI Facial Recognition SystemDocument54 pagesAI Facial Recognition SystemcontactchrisyellenNo ratings yet
- Research Article Image Processing Design and Algorithm Research Based On Cloud ComputingDocument10 pagesResearch Article Image Processing Design and Algorithm Research Based On Cloud ComputingKiruthiga PrabakaranNo ratings yet
- Computer Vision-Based Early Fire Detection Using Open CV and Machine LearningDocument11 pagesComputer Vision-Based Early Fire Detection Using Open CV and Machine LearningdataprodcsNo ratings yet
- Paper 3199Document5 pagesPaper 3199skhirtladze.davitNo ratings yet
- Bhagyashree FIRDocument44 pagesBhagyashree FIRChintu Janna.No ratings yet
- Sagar Institute of Research and Technology Bhopal (M.P) : Synopsis OnDocument10 pagesSagar Institute of Research and Technology Bhopal (M.P) : Synopsis OnNikhil ChoukseyNo ratings yet
- IJECCE 1245FinalNDocument6 pagesIJECCE 1245FinalNsureshgurujiNo ratings yet
- Image Processing Wikipedia Book PDFDocument99 pagesImage Processing Wikipedia Book PDFNeev TighnavardNo ratings yet
- Report Digital Image Processing On Edge Detection of ImageDocument15 pagesReport Digital Image Processing On Edge Detection of Imagejaya garg100% (2)
- Week0 INFT - Sem6 - IPDocument28 pagesWeek0 INFT - Sem6 - IPdivyasurve06101989No ratings yet
- DIP Lecture 4 - Components of Image ProcessingDocument4 pagesDIP Lecture 4 - Components of Image ProcessingSamrat BorkarNo ratings yet
- Image Compression Using Ai: Brief Insights Into Deep Learning Techniques and Ai FrameworksDocument6 pagesImage Compression Using Ai: Brief Insights Into Deep Learning Techniques and Ai FrameworksKamal SwamiNo ratings yet
- Research Paper - 21mcs047Document6 pagesResearch Paper - 21mcs04718UCOS150 SS METHUNNo ratings yet
- Syllabus PGDCADocument37 pagesSyllabus PGDCAmd sahidulla ayonNo ratings yet
- Digital Image ProcessingDocument118 pagesDigital Image ProcessingSigra JisawNo ratings yet
- Research Paper 2Document4 pagesResearch Paper 218UCOS150 SS METHUNNo ratings yet
- A Brief Experience On Journey Through Hardware Developments For Image Processing and It's Applications On CryptographyDocument10 pagesA Brief Experience On Journey Through Hardware Developments For Image Processing and It's Applications On CryptographydilipkkrNo ratings yet
- DIP MOD1-1-27 MergedDocument33 pagesDIP MOD1-1-27 Mergedrishabh shuklaNo ratings yet
- Digital Image Fundamentals1Document28 pagesDigital Image Fundamentals1Chandan KumarNo ratings yet
- ThesisDocument51 pagesThesisPROJECT POINTNo ratings yet
- Unit 2 - Chapter 1 - Lecture 2.1 Image Pipelining 1Document31 pagesUnit 2 - Chapter 1 - Lecture 2.1 Image Pipelining 1Vivek DangiNo ratings yet
- 6.digital Image Processing (1) - Pages-DeletedDocument61 pages6.digital Image Processing (1) - Pages-DeletedBHUVANA B PNo ratings yet
- IJETR022531Document4 pagesIJETR022531erpublicationNo ratings yet
- 6.digital Image ProcessingDocument50 pages6.digital Image Processingvidit112001No ratings yet
- Digital Image Processing and Recognition Using PytDocument4 pagesDigital Image Processing and Recognition Using Pyt9920102030No ratings yet
- Research Paper On Digital Image ProcessingDocument4 pagesResearch Paper On Digital Image Processingqxiarzznd100% (1)
- Satellite Image Stitcher Using ORBDocument6 pagesSatellite Image Stitcher Using ORBInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intoduction: Image Processing and Compression TechniquesDocument61 pagesIntoduction: Image Processing and Compression TechniquesVinod KumarNo ratings yet
- Review Paper On Image Processing in Distributed Environment: Sandeep Kaur, Manisha BhardwajDocument2 pagesReview Paper On Image Processing in Distributed Environment: Sandeep Kaur, Manisha Bhardwajmenilanjan89nLNo ratings yet
- 2 Dand 3 DImage Enhancement Chipin HDLDocument9 pages2 Dand 3 DImage Enhancement Chipin HDLSomu NaskarNo ratings yet
- DIP Reference NotesDocument54 pagesDIP Reference NotesAravindNo ratings yet
- Dip Module 1Document15 pagesDip Module 1Sujay SNo ratings yet
- 0 - Image ProcessingDocument20 pages0 - Image ProcessingSoham ChakrabortyNo ratings yet
- NUS MA4268 Ch1Document9 pagesNUS MA4268 Ch1ijclement07No ratings yet
- Computer Graphics AND Multimedia: Edusat Learning Resource MaterialDocument98 pagesComputer Graphics AND Multimedia: Edusat Learning Resource MaterialSampath KumarNo ratings yet
- Image Segmentationand Semantic Labelingusing Machine LearningDocument6 pagesImage Segmentationand Semantic Labelingusing Machine LearningZAHRA FASKANo ratings yet
- A New Approach in A Gray-Level Image Contrast Enhancement by Using Fuzzy Logic TechniqueDocument5 pagesA New Approach in A Gray-Level Image Contrast Enhancement by Using Fuzzy Logic TechniqueInternational Journal of Scientific Research in Science, Engineering and Technology ( IJSRSET )No ratings yet
- Advanced Image Processing Systems: International Journal of Imaging and Robotics February 2021Document19 pagesAdvanced Image Processing Systems: International Journal of Imaging and Robotics February 2021Penda FufuNo ratings yet
- Gujarat Technological UniversityDocument4 pagesGujarat Technological UniversityHina ChavdaNo ratings yet
- Image Processing Final ReportDocument44 pagesImage Processing Final ReportKaran SinghNo ratings yet
- ISMreportDocument23 pagesISMreportS DubeyNo ratings yet
- 2 21cst602-CgipDocument4 pages2 21cst602-Cgipvarshithaga3052003No ratings yet
- Text Recognization of Product For Blind Person Using MATLABDocument4 pagesText Recognization of Product For Blind Person Using MATLABPrathamesh PatilNo ratings yet
- Chapter 1. Getting Started With Image Processing: Add To Playlist Buy Ebook Bookmark Code FilesDocument49 pagesChapter 1. Getting Started With Image Processing: Add To Playlist Buy Ebook Bookmark Code FilesMarinNo ratings yet
- Introduction To Digital Image Processing and Analysis: Chronolab Vision, Chronolab A.G. Zug Switzerland, 1994Document78 pagesIntroduction To Digital Image Processing and Analysis: Chronolab Vision, Chronolab A.G. Zug Switzerland, 1994vamsiNo ratings yet
- Digital Image ProcessingDocument6 pagesDigital Image ProcessingNeha LodheNo ratings yet
- Resarch PaperDocument5 pagesResarch Paper18UCOS150 SS METHUNNo ratings yet
- Atari ST-3D Graphics Programming TextDocument364 pagesAtari ST-3D Graphics Programming TextratapiojosaNo ratings yet
- DIP Unit-3 Chapter-2 Lecture 4Document14 pagesDIP Unit-3 Chapter-2 Lecture 4Vivek DangiNo ratings yet
- Ijresm V1 I12 74Document4 pagesIjresm V1 I12 74BHUPANI SREE MADHUKIRAN ECEUG-2020 BATCHNo ratings yet
- 3-2 Fundamentals of Computer VisionDocument43 pages3-2 Fundamentals of Computer Visioncrystal macababbadNo ratings yet
- Final Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletDocument69 pagesFinal Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletSatyam Yadav100% (1)
- Computer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Document48 pagesComputer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Nadia F Mohammad Al-RoshdeeNo ratings yet
- Detection and Rectification of Distorted FingerprintsDocument7 pagesDetection and Rectification of Distorted FingerprintsEditor IJTSRDNo ratings yet
- DIP NotesDocument148 pagesDIP NotesHymaNo ratings yet
- Computer Vision Based Early Fire Detection Using Machine LearningDocument11 pagesComputer Vision Based Early Fire Detection Using Machine LearningdataprodcsNo ratings yet
- Image Compression: Efficient Techniques for Visual Data OptimizationFrom EverandImage Compression: Efficient Techniques for Visual Data OptimizationNo ratings yet
- Beee Worksheet: Experiment - 2.3Document6 pagesBeee Worksheet: Experiment - 2.3sharad kumarNo ratings yet
- Introduction To Magnetic CircuitsDocument23 pagesIntroduction To Magnetic Circuitssharad kumarNo ratings yet
- Introduction To DC and AC CircuitsDocument15 pagesIntroduction To DC and AC Circuitssharad kumarNo ratings yet
- Independent Project FinalDocument14 pagesIndependent Project Finalsharad kumarNo ratings yet
- Design and Implementation of Smart Home Network Using Cisco Packet TracerDocument6 pagesDesign and Implementation of Smart Home Network Using Cisco Packet Tracersharad kumarNo ratings yet
- Fire Alarm: Section: On21Bcs 417 A Semester: 2Document15 pagesFire Alarm: Section: On21Bcs 417 A Semester: 2sharad kumarNo ratings yet
- C++ Data Structures and Algorithms Learn How To Wr...Document314 pagesC++ Data Structures and Algorithms Learn How To Wr...Hindi mahavidyalaya100% (1)
- RF Controlled Solar Panel Based Robotic VehicleDocument6 pagesRF Controlled Solar Panel Based Robotic VehicleMohan Babu ANo ratings yet
- 1 s2.0 S0026269214000834 MainDocument11 pages1 s2.0 S0026269214000834 Mainwaynearkham0704No ratings yet
- SerializationDocument78 pagesSerializationPradeep NavalgiNo ratings yet
- The Definitive Guide To Jprofiler: All You Need To Know As A Performance ProfessionalDocument219 pagesThe Definitive Guide To Jprofiler: All You Need To Know As A Performance ProfessionalnandakarsanNo ratings yet
- RHSC Debug - For Internal Use Only - : 1 © 2018 ANSYS, Inc. ANSYS ConfidentialDocument76 pagesRHSC Debug - For Internal Use Only - : 1 © 2018 ANSYS, Inc. ANSYS Confidentialvaibhav_9090No ratings yet
- Vdocuments - MX Controlwave Micro Instruction Manual d301392x012Document172 pagesVdocuments - MX Controlwave Micro Instruction Manual d301392x012Misael Castillo CamachoNo ratings yet
- C String Concatenation TutorialDocument3 pagesC String Concatenation TutorialStevenNo ratings yet
- ICONICS Product Suite Getting Started GuideDocument164 pagesICONICS Product Suite Getting Started GuideHồ PhiNo ratings yet
- Rbead 600Document5 pagesRbead 600Rodrigo MirandaNo ratings yet
- Wega 2.2 C EngDocument2 pagesWega 2.2 C Engneoph138No ratings yet
- S100+Ethernet User+Manual EN 200615Document52 pagesS100+Ethernet User+Manual EN 200615AdamNo ratings yet
- 50s SMD TLE4250GDocument12 pages50s SMD TLE4250GSashaNo ratings yet
- Selection Criteria of A MicrocontrollerDocument13 pagesSelection Criteria of A MicrocontrollermikhailadvaniNo ratings yet
- 19" LCD Monitor Dell 1907Fpc: Service ManualDocument113 pages19" LCD Monitor Dell 1907Fpc: Service ManualMaxsuel PinheiroNo ratings yet
- Software E1 Quiz1Document13 pagesSoftware E1 Quiz1Jordan Nieva AndioNo ratings yet
- Basic C QuestionsDocument48 pagesBasic C QuestionsWilliam McconnellNo ratings yet
- CH 17 Distributed SystemsDocument50 pagesCH 17 Distributed SystemsKeilin NjiwaNo ratings yet
- OopsDocument227 pagesOopsPrema RajuNo ratings yet
- Week11-Lab-build A Network With Switch and Router With Packet TracerDocument22 pagesWeek11-Lab-build A Network With Switch and Router With Packet TracerAdnan AliNo ratings yet
- Department of Computer Science: Compare and Contrast The Common Scheduling Algorithms)Document4 pagesDepartment of Computer Science: Compare and Contrast The Common Scheduling Algorithms)Waseem AbbasNo ratings yet
- Chapter 3 Arithmetic For ComputersDocument49 pagesChapter 3 Arithmetic For ComputersicedalbertNo ratings yet
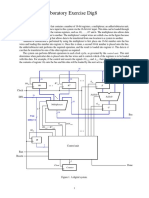
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNo ratings yet
- TV ReceiverDocument30 pagesTV ReceiverGerry Laurent TarrojaNo ratings yet
- Chapter 1 OS-Introduction-and-Hardware-Review Print VersionDocument6 pagesChapter 1 OS-Introduction-and-Hardware-Review Print VersionIonut GrozaNo ratings yet
- Powerpoint - OsDocument22 pagesPowerpoint - Osdivyanshu guptaNo ratings yet
- Comparison Between Engineering Branches: Cse and ItDocument12 pagesComparison Between Engineering Branches: Cse and ItRajesh MachineniNo ratings yet
- Question: Explain Context SwitchingDocument10 pagesQuestion: Explain Context SwitchingpathakpranavNo ratings yet
- FC - FV 922 924 Fire Voice Battery Calcs v3.1.0 A6V10744930 - enDocument1 pageFC - FV 922 924 Fire Voice Battery Calcs v3.1.0 A6V10744930 - enDaniel Alonso Nieto SalasNo ratings yet