Download as pdf or txt
You might also like
- Cascade Controller For DCDC Buck ConvertorDocument6 pagesCascade Controller For DCDC Buck ConvertorCristóbal Eduardo Carreño MosqueiraNo ratings yet
- A Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTDocument6 pagesA Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTSagiraju DileepNo ratings yet
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDocument6 pagesPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihNo ratings yet
- 2016 Zhang Et Al Pess VF 3lnpc PMSG BTB DMPC 2Document9 pages2016 Zhang Et Al Pess VF 3lnpc PMSG BTB DMPC 2nasbNo ratings yet
- Phasor Model of Full Scale Converter Wind Turbine For Small-Signal Stability AnalysisDocument6 pagesPhasor Model of Full Scale Converter Wind Turbine For Small-Signal Stability Analysisam_r_lNo ratings yet
- Grid Synchronization of Brushless Doubly Fed Asynchronous Generators in Wind Power SystemsDocument5 pagesGrid Synchronization of Brushless Doubly Fed Asynchronous Generators in Wind Power SystemsPaulo H TavaresNo ratings yet
- Control Structures of Power Electronics For DPGSDocument23 pagesControl Structures of Power Electronics For DPGSAnna Maria BanicaNo ratings yet
- 7 PDFDocument9 pages7 PDFRevuNo ratings yet
- Zhang2016 2Document17 pagesZhang2016 2Nassima BekhouchaNo ratings yet
- 2010 Control of An Unbalanced Stand-Alone DFIG-based Wind System Using Predictive Current Control MethodDocument8 pages2010 Control of An Unbalanced Stand-Alone DFIG-based Wind System Using Predictive Current Control Methoddaiduongxanh14113No ratings yet
- Design and Performance Evaluation of Subsynchronous Damping Controller With StatcomDocument9 pagesDesign and Performance Evaluation of Subsynchronous Damping Controller With StatcomThanh PhamNo ratings yet
- Digital Simulation of The Generalized Unified Power Flow Controller System With 60-Pulse GTO-Based Voltage Source ConverterDocument9 pagesDigital Simulation of The Generalized Unified Power Flow Controller System With 60-Pulse GTO-Based Voltage Source ConverterVijay KrishnaNo ratings yet
- Chen 2000Document10 pagesChen 2000Venkat PrakashNo ratings yet
- Sandeep 2014Document6 pagesSandeep 2014Gourab SahaNo ratings yet
- Ozsoy A Novel Current Controller Scheme For Doubly Fed Induction GeneratorsDocument10 pagesOzsoy A Novel Current Controller Scheme For Doubly Fed Induction GeneratorsdankorankoNo ratings yet
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 pagesControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavNo ratings yet
- Mohammedsaeed 2017Document6 pagesMohammedsaeed 2017joaoNo ratings yet
- Efectosde Los Harmonicos en MPPT 2016Document8 pagesEfectosde Los Harmonicos en MPPT 2016Taborda ErickNo ratings yet
- Egrid48402 2019 9092655Document5 pagesEgrid48402 2019 9092655maynaraNo ratings yet
- Laboratory-Scaled STATCOM For Unbalanced Voltage Sag Mitigation by Decoupled Double Synchronous Reference Current ControllersDocument6 pagesLaboratory-Scaled STATCOM For Unbalanced Voltage Sag Mitigation by Decoupled Double Synchronous Reference Current ControllersNavjot SinghNo ratings yet
- Design and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterDocument10 pagesDesign and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterAmiir AmirNo ratings yet
- Backstepping Control of Wind Energy System With Multilevel InverterDocument6 pagesBackstepping Control of Wind Energy System With Multilevel InvertermahaNo ratings yet
- Coordinated Control For Active and Reactive Power of PMSG-based Wind Turbine To Enhance The LVRT CapabilityDocument4 pagesCoordinated Control For Active and Reactive Power of PMSG-based Wind Turbine To Enhance The LVRT CapabilityMuhammad Zeeshan QureshiNo ratings yet
- 632154ijsetr12332 1456Document4 pages632154ijsetr12332 1456nadia alfituriNo ratings yet
- Paper PublicationDocument9 pagesPaper Publicationakhila100No ratings yet
- Harmonic Reduction of Three-Phase Power Inverter Injection Current Using Virtual AdmittanceDocument23 pagesHarmonic Reduction of Three-Phase Power Inverter Injection Current Using Virtual Admittanceamina bu bakerNo ratings yet
- An Improved SMC Control Strategies For PMSG Based WECSDocument10 pagesAn Improved SMC Control Strategies For PMSG Based WECSGIRISHNo ratings yet
- 4 Jaras Mar 2020Document8 pages4 Jaras Mar 2020Ravikumaar RayalaNo ratings yet
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDocument7 pagesSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明No ratings yet
- 1 s2.0 S0142061523004568 MainDocument10 pages1 s2.0 S0142061523004568 MainMinh Tạ ĐứcNo ratings yet
- Cascade-Free Model Predictive Control For Single-Phase Grid-Connected Power ConvertersDocument9 pagesCascade-Free Model Predictive Control For Single-Phase Grid-Connected Power ConvertersAnonymous FPU4iW89VYNo ratings yet
- 7 PDFDocument9 pages7 PDFMaroju Santosh KiranNo ratings yet
- 10.1515 - Ijeeps 2021 03671 1Document14 pages10.1515 - Ijeeps 2021 03671 1Arkan ahmed husseinNo ratings yet
- A Finite Control Set Model Predictive Control Scheme For Single-Phase Grid-Connected Inverters 2020Document17 pagesA Finite Control Set Model Predictive Control Scheme For Single-Phase Grid-Connected Inverters 2020farhaniNo ratings yet
- 2 Ares - 1502.00215ggDocument6 pages2 Ares - 1502.00215ggMatheus MaiaNo ratings yet
- 8-A General Algorithm For Flexible Active Power Control of Photovoltaic Systems-18Document7 pages8-A General Algorithm For Flexible Active Power Control of Photovoltaic Systems-18Đông Ngô ThanhNo ratings yet
- J. of Mechanics Engineering and Automation 7 (2017) 171-179Document9 pagesJ. of Mechanics Engineering and Automation 7 (2017) 171-179Sơn PhạmNo ratings yet
- Modelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDocument8 pagesModelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDrYs Kishore BabuNo ratings yet
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- Journal Jpe 18-4 934630386Document10 pagesJournal Jpe 18-4 934630386Shivu5art workNo ratings yet
- A Novel Section 3Document8 pagesA Novel Section 3qusay salemNo ratings yet
- VSC Smartgrid VRDocument8 pagesVSC Smartgrid VRNaji AlmusabiNo ratings yet
- An Improved Newton Load Flow For Distributed Generation Based On Different Control StrategiesDocument5 pagesAn Improved Newton Load Flow For Distributed Generation Based On Different Control StrategiesamirehosseinNo ratings yet
- Control of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmDocument6 pagesControl of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmgilmartNo ratings yet
- Direct Model-Based Predictive Control of A Three-Phase Grid Connected VSI For Photovoltaic Power EvacuationDocument6 pagesDirect Model-Based Predictive Control of A Three-Phase Grid Connected VSI For Photovoltaic Power EvacuationFeyikemiNo ratings yet
- Tahir 2016Document16 pagesTahir 2016khaledNo ratings yet
- Fractional-Order Synergetic Control of The Asynchronous Generator-Based Variable-Speed Multi-Rotor Wind Power SystemsDocument19 pagesFractional-Order Synergetic Control of The Asynchronous Generator-Based Variable-Speed Multi-Rotor Wind Power SystemsemadNo ratings yet
- 2010 An Improved Control Strategy Using A PI-Resonant Controller For An Unbalanced Stand-Alone Doubly-Fed Induction GeneratorDocument10 pages2010 An Improved Control Strategy Using A PI-Resonant Controller For An Unbalanced Stand-Alone Doubly-Fed Induction Generatordaiduongxanh14113No ratings yet
- GridDocument6 pagesGridgiongan342No ratings yet
- Novel Configuration and Control of DFIG-based FESS Associated To A Wind Turbine Connected To Power GridDocument5 pagesNovel Configuration and Control of DFIG-based FESS Associated To A Wind Turbine Connected To Power GridMohamed AlNo ratings yet
- JETIR1602005Document6 pagesJETIR1602005Med GuerNo ratings yet
- Ijert Ijert: Fuzzy Controller Based Grid Connected Res at Distribution Level With Power Quality ImprovementDocument7 pagesIjert Ijert: Fuzzy Controller Based Grid Connected Res at Distribution Level With Power Quality ImprovementBerhanu ZelalemNo ratings yet
- V5N2 043Document6 pagesV5N2 043Alif Mu'tashimNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Fahad 2019Document5 pagesFahad 2019Blmjdb AbdelhafidNo ratings yet
- An Efficient and High-Gain Inverter BaseDocument11 pagesAn Efficient and High-Gain Inverter BasertsridhareeeNo ratings yet
- Operation and Coordinated Control of Multi-Terminal VSC-HVDC Transmission System For Wind Power GenerationDocument7 pagesOperation and Coordinated Control of Multi-Terminal VSC-HVDC Transmission System For Wind Power GenerationGuru MishraNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- Novel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT AlgorithmDocument6 pagesNovel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT Algorithmchandu_chowdary_2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- IEEEDocument9 pagesIEEESagiraju DileepNo ratings yet
- IET2Document8 pagesIET2Sagiraju DileepNo ratings yet
- 321Document12 pages321Sagiraju DileepNo ratings yet
- Rashid 2017Document8 pagesRashid 2017Sagiraju DileepNo ratings yet
- ISA Transactions: P.K. Gayen, D. Chatterjee, S.K. GoswamiDocument16 pagesISA Transactions: P.K. Gayen, D. Chatterjee, S.K. GoswamiSagiraju DileepNo ratings yet
- Zarei 2016Document13 pagesZarei 2016Sagiraju DileepNo ratings yet
- Engineering Science and Technology, An International JournalDocument11 pagesEngineering Science and Technology, An International JournalSagiraju DileepNo ratings yet
- Control For Grid Connected DFIG Based Wind Energy System Using Adaptive Neuro Fuzzy TechniqueDocument18 pagesControl For Grid Connected DFIG Based Wind Energy System Using Adaptive Neuro Fuzzy TechniqueSagiraju DileepNo ratings yet
- A Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTDocument6 pagesA Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTSagiraju DileepNo ratings yet
- PV BessDocument10 pagesPV BessSagiraju DileepNo ratings yet
- EG2070 FACTS and HVDC in Electric Power Systems: Static Compensator (STATCOM)Document22 pagesEG2070 FACTS and HVDC in Electric Power Systems: Static Compensator (STATCOM)Sagiraju DileepNo ratings yet
- A New Fuzzy Logic Based Control Strategy For Variable Speed Wind Generator To Enhance The Transient Stability of Fixed Speed Wind GeneratorDocument6 pagesA New Fuzzy Logic Based Control Strategy For Variable Speed Wind Generator To Enhance The Transient Stability of Fixed Speed Wind GeneratorSagiraju DileepNo ratings yet
- Network 01Document135 pagesNetwork 01Sagiraju DileepNo ratings yet
- Global Energy Storage Opportunity 2018Document42 pagesGlobal Energy Storage Opportunity 2018Tadgh CullenNo ratings yet
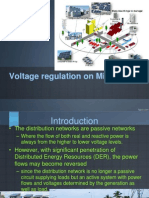
- Voltage Regulation On Micro GridDocument61 pagesVoltage Regulation On Micro GridkarthikNo ratings yet
- Control and Operation of A DC Grid-Based Wind Power Generation System in A Microgrid PDFDocument4 pagesControl and Operation of A DC Grid-Based Wind Power Generation System in A Microgrid PDFLeMeniz InfotechNo ratings yet
- Wind Energy PhilippinesDocument7 pagesWind Energy Philippineseliyaht05No ratings yet
- iNDIAN eNEGY sCENARIODocument18 pagesiNDIAN eNEGY sCENARIODhiraj ShringiNo ratings yet
- Govt SchemeDocument336 pagesGovt SchemeRamyapremnathNo ratings yet
- Large Wind Power Plants Modeling TechniquesDocument7 pagesLarge Wind Power Plants Modeling Techniquesmohamed berririNo ratings yet
- Vertical Axis Wind Turbine For Highway ApplicationDocument5 pagesVertical Axis Wind Turbine For Highway ApplicationAgnesningtyasNo ratings yet
- Distributed GenerationDocument51 pagesDistributed GenerationEng KapoNo ratings yet
- Wind Energy: Guided byDocument18 pagesWind Energy: Guided byDev KumarNo ratings yet
- Electrical and Electronics Engineering Vii Semester: Course Theory/Lab L T P C CodeDocument66 pagesElectrical and Electronics Engineering Vii Semester: Course Theory/Lab L T P C Codejitendra jhaNo ratings yet
- T&D-May 2011Document92 pagesT&D-May 2011ratacruelNo ratings yet
- Smart GridsDocument47 pagesSmart Gridsminh_huyNo ratings yet
- Darrieus Wind TurbineDocument4 pagesDarrieus Wind TurbineTino FerinandaNo ratings yet
- MHIvestas 201014 092904Document3 pagesMHIvestas 201014 092904Naina lalwaniNo ratings yet
- Windside VawtDocument1 pageWindside VawtYosua Heru IrawanNo ratings yet
- Project ReportDocument88 pagesProject ReportDhananjay KumarNo ratings yet
- DC Vessel System BookDocument54 pagesDC Vessel System BookSuzanne WatsonNo ratings yet
- Machine Design Report Final DraftDocument76 pagesMachine Design Report Final DraftLuis AfonsoNo ratings yet
- Energy StorageDocument49 pagesEnergy StorageTariciogluNo ratings yet
- Electricity Markets and Renewable GenerationDocument326 pagesElectricity Markets and Renewable GenerationElimar RojasNo ratings yet
- Kau S AuditDocument14 pagesKau S Auditmatsagaraditya7No ratings yet
- 60 - 117. Mixed-Use Eco-Skyscrapers As A Solution For Urban Environmental ManagementDocument6 pages60 - 117. Mixed-Use Eco-Skyscrapers As A Solution For Urban Environmental ManagementKathrine DisuzaNo ratings yet
- Boiler Design For Modern Coal Fired Power PlantsDocument9 pagesBoiler Design For Modern Coal Fired Power PlantsIkhwan MaulanaNo ratings yet
- Economics of Electricity Generation: Dr. Péter Kaderják Director, REKKDocument27 pagesEconomics of Electricity Generation: Dr. Péter Kaderják Director, REKKdm mNo ratings yet
- Wind Turbines: Difference Between A Wind Turbine and A WindmillDocument3 pagesWind Turbines: Difference Between A Wind Turbine and A WindmillJonathan PassNo ratings yet
- Name of The Organization: COURSERA: Wind EnergyDocument24 pagesName of The Organization: COURSERA: Wind EnergyMoin KhatriNo ratings yet
- Alternative Energy ArticleDocument3 pagesAlternative Energy Articleapi-307839085No ratings yet
- Multiple Model Predictive Control For WindDocument10 pagesMultiple Model Predictive Control For WindrsowmiyaNo ratings yet
- Journal - October 2014Document110 pagesJournal - October 2014RandombageMaduraCharithalNo ratings yet