Download as pdf or txt
You might also like
- Algorithms For Calculating VarianceDocument11 pagesAlgorithms For Calculating Varianceisabella343No ratings yet
- Lab Manual - Level 2 - TraverseDocument12 pagesLab Manual - Level 2 - TraverseNina WalinNo ratings yet
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 pagesNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNo ratings yet
- Yr11 Maths MM Circular Functions Ta 2016 GrouptaskDocument6 pagesYr11 Maths MM Circular Functions Ta 2016 Grouptaskapi-412490459No ratings yet
- Surveying Elem HigherDocument14 pagesSurveying Elem HigherRenzo Ilagan100% (2)
- Wedge FailureDocument10 pagesWedge FailurerandyNo ratings yet
- Numerical MethodsDocument72 pagesNumerical MethodsAndreas NeophytouNo ratings yet
- Numbers PDFDocument26 pagesNumbers PDFshubham guptaNo ratings yet
- Numerical Analysis Lecture Notes: 1. Computer ArithmeticDocument6 pagesNumerical Analysis Lecture Notes: 1. Computer ArithmeticSaid BourazzaNo ratings yet
- Transmathematical BasisDocument10 pagesTransmathematical BasisviniciusmpsantosNo ratings yet
- 3.5 Coefficients of The Interpolating Polynomial: Interpolation and ExtrapolationDocument4 pages3.5 Coefficients of The Interpolating Polynomial: Interpolation and ExtrapolationVinay GuptaNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument7 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Operations On Floating Point NumbersDocument16 pagesOperations On Floating Point NumbersAyush BajpaiNo ratings yet
- Matlab Marina Integration PrimerDocument7 pagesMatlab Marina Integration Primerjmcd_irlNo ratings yet
- Power Analysis of Ntruencrypt On Arm Cortex-M4: 2. NtruencrpytDocument4 pagesPower Analysis of Ntruencrypt On Arm Cortex-M4: 2. NtruencrpytMircea PetrescuNo ratings yet
- Arbitrary-Precision Decimal Floating-Point NumbersDocument6 pagesArbitrary-Precision Decimal Floating-Point Numbers黄子龙No ratings yet
- Construction of The Transcomplex NumbersDocument6 pagesConstruction of The Transcomplex NumbersRichardNo ratings yet
- The CADNA SoftwareDocument46 pagesThe CADNA SoftwarekavegNo ratings yet
- CH5530-Simulation Lab: MATLAB Additional Graded Session 01/04/2020Document3 pagesCH5530-Simulation Lab: MATLAB Additional Graded Session 01/04/2020KATTURI SAI RAGHAVA ch19m017No ratings yet
- CH 1 Number System and Numerical Error AnalysisDocument11 pagesCH 1 Number System and Numerical Error AnalysisAbdulkerim kedir80% (5)
- (Turner) - Applied Scientific Computing - Chap - 02Document19 pages(Turner) - Applied Scientific Computing - Chap - 02DanielaSofiaRubianoBlancoNo ratings yet
- 13 CS1FC16 AccuracyDocument6 pages13 CS1FC16 AccuracyAnna AbcxyzNo ratings yet
- Monte Carlo As A Tool To Solve Problems in Theoretical Science.Document11 pagesMonte Carlo As A Tool To Solve Problems in Theoretical Science.Rahul SharmaNo ratings yet
- Random Number GenerationDocument43 pagesRandom Number GenerationAnsh GanatraNo ratings yet
- 5 Round-Off Errors and Truncation ErrorsDocument35 pages5 Round-Off Errors and Truncation ErrorsEdryan PoNo ratings yet
- 12 Fib o AlgorithmDocument33 pages12 Fib o Algorithmtearyur kwonNo ratings yet
- On The Design and Implementation of A Generic Number Type For Real Algebraic Number Computations Based On Expression DagsDocument27 pagesOn The Design and Implementation of A Generic Number Type For Real Algebraic Number Computations Based On Expression DagsIvo RösslingNo ratings yet
- Lab1 MonteDocument15 pagesLab1 Monte姚逸凡No ratings yet
- Ponto FlutuanteDocument87 pagesPonto FlutuantejonastibolaNo ratings yet
- Chapter OneDocument10 pagesChapter OneAlemayew AzezewNo ratings yet
- 4 Numbers and MatricesDocument26 pages4 Numbers and MatricesSara Quintana HornaNo ratings yet
- Dynamic ProgrammingDocument12 pagesDynamic ProgrammingM.A rajaNo ratings yet
- Numc PDFDocument18 pagesNumc PDFMadhur MayankNo ratings yet
- Introduction - Modular Arithmetic - Finite Fields - N-Space Over A Finite Field - Error Correcting Codes - Exercises IntroductionDocument16 pagesIntroduction - Modular Arithmetic - Finite Fields - N-Space Over A Finite Field - Error Correcting Codes - Exercises IntroductionHaran Harith NaickerNo ratings yet
- Bu 33436438Document3 pagesBu 33436438Shakeel RanaNo ratings yet
- Intro Ducci On MathematicaDocument37 pagesIntro Ducci On MathematicaAbiNo ratings yet
- Roundoff and TR Ncation Errors Truncation Errors: Powerpoints Organized by Dr. Michael R. Gustafson Ii, Duke UniversityDocument20 pagesRoundoff and TR Ncation Errors Truncation Errors: Powerpoints Organized by Dr. Michael R. Gustafson Ii, Duke UniversityKrischanSayloGelasanNo ratings yet
- Fast Inverse Square RootDocument8 pagesFast Inverse Square RootMaxminlevelNo ratings yet
- Mathematical Functions: Number-Theoretic and Representation FunctionsDocument11 pagesMathematical Functions: Number-Theoretic and Representation FunctionsNikita AgrawalNo ratings yet
- SEM 3 - GE3 - Numerical Analysis 1Document16 pagesSEM 3 - GE3 - Numerical Analysis 1Neelarka RoyNo ratings yet
- Choosing Numbers For The Properties of Their SquaresDocument11 pagesChoosing Numbers For The Properties of Their SquaresHarshita ChaturvediNo ratings yet
- Design and Analysis of Algorithms - Tutorial Sheet PracticeDocument2 pagesDesign and Analysis of Algorithms - Tutorial Sheet PracticeMIHIKA PARAG DESHPANDENo ratings yet
- Week1 Lecture2Document39 pagesWeek1 Lecture2Samar AhmadNo ratings yet
- Integration ProblemsDocument5 pagesIntegration ProblemsMartin Alejandro Arredondo GonzalezNo ratings yet
- NLAFull Notes 22Document59 pagesNLAFull Notes 22forspamreceivalNo ratings yet
- Assignment 2Document4 pagesAssignment 210121011No ratings yet
- Fixed Point Math F-LemieuDocument5 pagesFixed Point Math F-Lemieuoa98105No ratings yet
- VahidDocument18 pagesVahidSwastik MitraNo ratings yet
- GSC-320 Numerical Computing: Lecturer:Fasiha IkramDocument17 pagesGSC-320 Numerical Computing: Lecturer:Fasiha IkramYunus Sh Mustafa ZanzibarNo ratings yet
- EngMath111 Module Prelim PDFDocument23 pagesEngMath111 Module Prelim PDFRoselyn Montilla QuiocsonNo ratings yet
- Lecture Notes17Document122 pagesLecture Notes17Dr Simran KaurNo ratings yet
- Eric C. R. Hehner R. N. S. Horspool: D D D N D BDocument16 pagesEric C. R. Hehner R. N. S. Horspool: D D D N D BPrecious Anne Talosig-PrudencianoNo ratings yet
- Scientific Computing - LESSON 1: Computer Arithmetic and Error Analysis 1Document10 pagesScientific Computing - LESSON 1: Computer Arithmetic and Error Analysis 1Lee Hei LongNo ratings yet
- Arithm CRCDocument12 pagesArithm CRCsai leenaNo ratings yet
- Omparisons: X y Z X y and y Z X yDocument11 pagesOmparisons: X y Z X y and y Z X ylibin_paul_2No ratings yet
- Finite Word Length Effects in DSP: Prepared BY Guided BYDocument28 pagesFinite Word Length Effects in DSP: Prepared BY Guided BYAlexNo ratings yet
- What Are Floating Point Numbers?Document7 pagesWhat Are Floating Point Numbers?gsrashu19No ratings yet
- CHAP3 Decrease and ConquerDocument47 pagesCHAP3 Decrease and ConquerDo DragonNo ratings yet
- Generating Random NumbersDocument32 pagesGenerating Random NumbersEman ShahidNo ratings yet
- Lecture #2 Komnum - Roundoff Truncation ErrorsDocument37 pagesLecture #2 Komnum - Roundoff Truncation ErrorsNata SunardiNo ratings yet
- Introduction To Numerical Analysis With ExamplesDocument36 pagesIntroduction To Numerical Analysis With Examplesmarjorie moranNo ratings yet
- An Introduction To Affine ArithmeticDocument16 pagesAn Introduction To Affine Arithmeticgigio lassoNo ratings yet
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingFrom EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo ratings yet
- The Perspex Machine - AndersonDocument22 pagesThe Perspex Machine - AndersonRichardNo ratings yet
- Presentation Transcomplex TopologyDocument53 pagesPresentation Transcomplex TopologyRichardNo ratings yet
- Infinity, Nullity, TransmathematicsDocument3 pagesInfinity, Nullity, TransmathematicsRichardNo ratings yet
- Construction of The Transcomplex NumbersDocument6 pagesConstruction of The Transcomplex NumbersRichardNo ratings yet
- Division by Zero and Transreal NumbersDocument3 pagesDivision by Zero and Transreal NumbersRichardNo ratings yet
- Construction of The Transreal NumbersDocument13 pagesConstruction of The Transreal NumbersRichardNo ratings yet
- Lessson 9 TrigonometryDocument11 pagesLessson 9 Trigonometryjamesmorara3No ratings yet
- 3B09 - Exercise - E - Full SolutionDocument25 pages3B09 - Exercise - E - Full SolutionAnswermanNo ratings yet
- Circle Theorems and Circle Geometry (H)Document22 pagesCircle Theorems and Circle Geometry (H)Maria Khin YadanarNo ratings yet
- Circles PPTDocument69 pagesCircles PPTIfrah ZiaNo ratings yet
- Mathematical Symbols 1Document8 pagesMathematical Symbols 1Arianne Rose FangonNo ratings yet
- 2.5 ChuchunessDocument19 pages2.5 ChuchunessChristian ArellanoNo ratings yet
- River Meanders - Theory of Minimum VarianceDocument21 pagesRiver Meanders - Theory of Minimum VariancegeoecologistNo ratings yet
- Catia V5 R16 - Generative Shape DesignDocument946 pagesCatia V5 R16 - Generative Shape DesignHarsh100% (46)
- Release Notes Csi Bridge 2016 V 1820Document16 pagesRelease Notes Csi Bridge 2016 V 1820Ihab El AghouryNo ratings yet
- Din 6930 Octobre 2011Document18 pagesDin 6930 Octobre 2011Franck Savignard100% (1)
- Circle TheoremsDocument2 pagesCircle TheoremsRashawn AbrahawnNo ratings yet
- Projection of LinesDocument39 pagesProjection of LinesMohammed Rashik B C100% (1)
- Final PPT of Tracing of Polar CurvesDocument66 pagesFinal PPT of Tracing of Polar CurvesNidhi Rai100% (2)
- Activity 14 - Angles and DirectionsDocument11 pagesActivity 14 - Angles and DirectionsJohn Angelo CompetenteNo ratings yet
- Sum of Interior Angles of A PolygonDocument7 pagesSum of Interior Angles of A PolygonMary Ann Llona-Marbida100% (1)
- Geometry ReviewDocument2 pagesGeometry ReviewJesuv Cristian CleteNo ratings yet
- Learning Competency Code: M9Ge-Ivf-G-1 References: Mathematics Grade 9 (Pp. 497-500)Document4 pagesLearning Competency Code: M9Ge-Ivf-G-1 References: Mathematics Grade 9 (Pp. 497-500)Jennyboy Casul100% (1)
- Math Challenge 2013Document6 pagesMath Challenge 2013fyeth10No ratings yet
- Math 4 Quarter 3Document5 pagesMath 4 Quarter 3MARICAR LALUSINNo ratings yet
- Review Exercises For TrigonometryDocument1 pageReview Exercises For TrigonometryKametchi Anne BlancaflorNo ratings yet
- 3D Tools For Archicad: Reference ManualDocument50 pages3D Tools For Archicad: Reference ManualNeyd Ariel Calderón CastroNo ratings yet
- Cohesive Zone - Blast FurnaceDocument8 pagesCohesive Zone - Blast Furnacescribdaccount0No ratings yet
- Teaching Program Year 9Document30 pagesTeaching Program Year 9Evan TranNo ratings yet
- Lesson PlanDocument8 pagesLesson PlanStell Marie Xie100% (1)
- 09 Circular MeasureDocument16 pages09 Circular MeasureQtravel GtnNo ratings yet
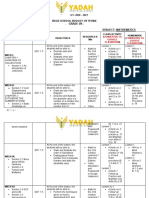
- Budget of Work S.Y. 2020-2021-Grade 7Document16 pagesBudget of Work S.Y. 2020-2021-Grade 7Ronald AtibagosNo ratings yet