Download as pdf or txt
You might also like
- The Ferrari Way ArticleDocument4 pagesThe Ferrari Way ArticleNisha Lauren VishvanathNo ratings yet
- BMW Acronyms & AbbreviationsDocument21 pagesBMW Acronyms & AbbreviationsProfCBSjr100% (1)
- Manual Eco Gas BRCDocument79 pagesManual Eco Gas BRCsleepyninjitsu67% (3)
- Speed Variation Using Cone Ring Traction DriveDocument7 pagesSpeed Variation Using Cone Ring Traction DriveKedar DhongadeNo ratings yet
- Working of Gear TransmissionDocument6 pagesWorking of Gear TransmissionTechmate TechnologiesNo ratings yet
- IRJET Research On Clutchless Quick GearDocument3 pagesIRJET Research On Clutchless Quick Gearscdindar3838No ratings yet
- A Study On Dual Clutch Transmission: P. P. Patnaik & Bhabani S. MahantoDocument6 pagesA Study On Dual Clutch Transmission: P. P. Patnaik & Bhabani S. MahantoTJPRC PublicationsNo ratings yet
- 6272654cb8f796 24568097Document4 pages6272654cb8f796 24568097achuc2009No ratings yet
- Ijsrdv4i10408 PDFDocument2 pagesIjsrdv4i10408 PDFHáŗï HářäņNo ratings yet
- Torque Converter SystemDocument32 pagesTorque Converter SystembederinadmlNo ratings yet
- 1 s2.0 S2773153722000056 MainDocument11 pages1 s2.0 S2773153722000056 MainThơm PhùngNo ratings yet
- Volltext PDFDocument11 pagesVolltext PDFa.monem ShoalaNo ratings yet
- Challenges and Opportunities in Automotive Transmission ControlDocument6 pagesChallenges and Opportunities in Automotive Transmission ControlArnabGhoshNo ratings yet
- Modeling of Wheels and TiresDocument8 pagesModeling of Wheels and TireswhereareyoudearNo ratings yet
- Traction Control For BikeDocument10 pagesTraction Control For BikeSachin KumarNo ratings yet
- Final SynopsisDocument9 pagesFinal SynopsisUttkarsh ShelarNo ratings yet
- Gear Shifting Control For Pure Electric Vehicle With Inverse-AMTDocument5 pagesGear Shifting Control For Pure Electric Vehicle With Inverse-AMTThơm PhùngNo ratings yet
- 2005 - Identification "Allshift"Document34 pages2005 - Identification "Allshift"Shivam KohliNo ratings yet
- Design of Fluid Coupling For Efficient TDocument4 pagesDesign of Fluid Coupling For Efficient TKyNo ratings yet
- Ijcrt 181756Document6 pagesIjcrt 181756Duc DungNo ratings yet
- Intelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementDocument23 pagesIntelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementTejas shastrakarNo ratings yet
- A Study of Maximum Power Operation For Engine in Continuously Variable Transmission PowertrainDocument4 pagesA Study of Maximum Power Operation For Engine in Continuously Variable Transmission PowertrainSanjeev RanjanNo ratings yet
- Mechatronic Analysis Improves EfficiencyDocument2 pagesMechatronic Analysis Improves EfficiencyMilan PavlovicNo ratings yet
- 9 - Optimal Decoupled Control For Dry Clutch EngagementDocument6 pages9 - Optimal Decoupled Control For Dry Clutch EngagementMehdi NiksereshtNo ratings yet
- Dual Clutch PaperDocument7 pagesDual Clutch PapersharatheatonNo ratings yet
- Automatic Gear Shift MechanismDocument14 pagesAutomatic Gear Shift MechanismPrabir Kumar PatiNo ratings yet
- CVT Simulation On The Dynamic Engine Test BedDocument3 pagesCVT Simulation On The Dynamic Engine Test BedCiprian SerdinNo ratings yet
- Automatic Gear BoxDocument19 pagesAutomatic Gear BoxInquiry XEEPLNo ratings yet
- Ijaiem 2014 09 07 8Document12 pagesIjaiem 2014 09 07 8International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Mechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoDocument13 pagesMechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoAnthonyRivasNo ratings yet
- Design of Single Acting Pulley Actuator (SAPA) Continuously Variable Transmission (CVT)Document9 pagesDesign of Single Acting Pulley Actuator (SAPA) Continuously Variable Transmission (CVT)Benjamin F ZavalaNo ratings yet
- Simulation and Control of An Automotive ClutchDocument6 pagesSimulation and Control of An Automotive ClutchSali ÁdámNo ratings yet
- Traction Control SystemDocument2 pagesTraction Control SystemHammad BurneyNo ratings yet
- Irjet V7i10282Document4 pagesIrjet V7i10282scdindar3838No ratings yet
- Next Generation Awd Actuators PDFDocument5 pagesNext Generation Awd Actuators PDFAshish MauryaNo ratings yet
- Formation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelDocument10 pagesFormation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelTJPRC PublicationsNo ratings yet
- A Moment-of-Inertia-Driven Engine Start-Up Method Based On Adaptive Model Predictive Control For Hybrid Electric Vehicles With Drivability OptimizationDocument13 pagesA Moment-of-Inertia-Driven Engine Start-Up Method Based On Adaptive Model Predictive Control For Hybrid Electric Vehicles With Drivability OptimizationEga PramNo ratings yet
- Hoist: Cranes With BrainsDocument4 pagesHoist: Cranes With BrainsErc Nunez VNo ratings yet
- Modelling and Simulation of Automatic TransmissionDocument11 pagesModelling and Simulation of Automatic TransmissionInternational Journal of Innovative Science and Research Technology100% (1)
- Research and Test On Traction Control System of Distributed Driving Electric VehiclesDocument4 pagesResearch and Test On Traction Control System of Distributed Driving Electric VehiclesAV VNo ratings yet
- TransmissionDocument15 pagesTransmissionRITESH RATHORENo ratings yet
- Comparison of Feedback Control TechniquesDocument12 pagesComparison of Feedback Control TechniquesKunheechoNo ratings yet
- 821pneumatic Gear Transmission For Two Wheeler PDFDocument6 pages821pneumatic Gear Transmission For Two Wheeler PDFNithinNo ratings yet
- Launch ControlDocument11 pagesLaunch ControlJohn ByroNo ratings yet
- Abvı01597172Document11 pagesAbvı01597172cakirmeNo ratings yet
- Permanent Magnet DC Motor Control - A Simple Pid (Proportional Integral Derivative)Document9 pagesPermanent Magnet DC Motor Control - A Simple Pid (Proportional Integral Derivative)Juan Martín ChimentoNo ratings yet
- Designing of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFDocument4 pagesDesigning of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFHussnain AbbasNo ratings yet
- Improvement of Fullload Performance of An Automotive Engine Usingadaptive VDocument6 pagesImprovement of Fullload Performance of An Automotive Engine Usingadaptive VMohd AliNo ratings yet
- 1 s2.0 S0925231215001484 MainDocument10 pages1 s2.0 S0925231215001484 MaindtuqdkapwvvjbtffjpNo ratings yet
- Control of Gear Shifts in Dual Clutch Transmission PowertrainsDocument14 pagesControl of Gear Shifts in Dual Clutch Transmission PowertrainsOday AliNo ratings yet
- Artificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodDocument7 pagesArtificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodAshwani RanaNo ratings yet
- 36 Ranbir SinghDocument5 pages36 Ranbir SinghBbaPbaNo ratings yet
- Acc 2014 6858933Document7 pagesAcc 2014 6858933mohammad ghaderzadehNo ratings yet
- Zeroshift Automated Manual Transmission SAE2007!26!061Document4 pagesZeroshift Automated Manual Transmission SAE2007!26!061José Antonio GutiérrezNo ratings yet
- Electromechanical ActuatorsDocument4 pagesElectromechanical ActuatorsMohammed Asif NNo ratings yet
- Basic DC Motor Speed PID Control With The Infineon C167 FamilyDocument10 pagesBasic DC Motor Speed PID Control With The Infineon C167 FamilyCAFECHINONo ratings yet
- TCST 2016 2620421Document9 pagesTCST 2016 2620421mohammad ghaderzadehNo ratings yet
- Automatic GearboxDocument38 pagesAutomatic GearboxCristian IfrimNo ratings yet
- An Introduction To Rotor Flux ControlDocument14 pagesAn Introduction To Rotor Flux Controlgarethgriffiths1984No ratings yet
- Car Wheel Slip Modelling Simulation and Control Us PDFDocument4 pagesCar Wheel Slip Modelling Simulation and Control Us PDFThien MaiNo ratings yet
- Design and Optimization of A Throttle Body Assembly by CFD AnalysisDocument11 pagesDesign and Optimization of A Throttle Body Assembly by CFD Analysisbob loblawNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Separator Shut Down ProcedureDocument6 pagesSeparator Shut Down ProcedurethisisjineshNo ratings yet
- CL Test SimulationDocument5 pagesCL Test SimulationthisisjineshNo ratings yet
- Assessment of Thermal MGMT Losses Revised2002Document11 pagesAssessment of Thermal MGMT Losses Revised2002thisisjineshNo ratings yet
- Power-Based Cycle Life Efficiency Model SpreadsheetDocument11 pagesPower-Based Cycle Life Efficiency Model SpreadsheetthisisjineshNo ratings yet
- 2014-28-0019 Case Study-Strengthening of Axle Shaft by Heat Treatment To Overcome TwistDocument6 pages2014-28-0019 Case Study-Strengthening of Axle Shaft by Heat Treatment To Overcome TwistthisisjineshNo ratings yet
- Facility For Performance Testing of Power Transmission UnitsDocument12 pagesFacility For Performance Testing of Power Transmission UnitsthisisjineshNo ratings yet
- A Electric Vehicle Powertrain Simulation and Test of Driving Cycle Based On AC Electric Dynamometer Test BenchDocument4 pagesA Electric Vehicle Powertrain Simulation and Test of Driving Cycle Based On AC Electric Dynamometer Test BenchthisisjineshNo ratings yet
- Roundness FiltersDocument42 pagesRoundness FiltersthisisjineshNo ratings yet
- Roles and Motivations For Roundness Instrumentation MetrologyDocument19 pagesRoles and Motivations For Roundness Instrumentation MetrologythisisjineshNo ratings yet
- Causes and Failures Classification of Industrial Electric MotorDocument5 pagesCauses and Failures Classification of Industrial Electric MotorthisisjineshNo ratings yet
- A For AppleDocument1 pageA For ApplethisisjineshNo ratings yet
- Electric MotorDocument20 pagesElectric MotorthisisjineshNo ratings yet
- Life Cycle Testing of Lithium Batteries For Fast Charging and Second-Use ApplicationsDocument10 pagesLife Cycle Testing of Lithium Batteries For Fast Charging and Second-Use ApplicationsthisisjineshNo ratings yet
- A Tribological Study of Synchronizing Devices UsedDocument7 pagesA Tribological Study of Synchronizing Devices UsedthisisjineshNo ratings yet
- Transmisiones y Equipos Mecánicos S.A. de C.V.: Customer Profile: Joel OrtizDocument2 pagesTransmisiones y Equipos Mecánicos S.A. de C.V.: Customer Profile: Joel OrtizthisisjineshNo ratings yet
- ScuffingDocument3 pagesScuffingthisisjineshNo ratings yet
- Tooth Wear Nomenclature - TDDocument4 pagesTooth Wear Nomenclature - TDthisisjineshNo ratings yet
- Why Does The Shift Shock Phenomenon Occur in Lower Gears As Compared To Higher Gears in Automatic Transmission EngineDocument2 pagesWhy Does The Shift Shock Phenomenon Occur in Lower Gears As Compared To Higher Gears in Automatic Transmission EnginethisisjineshNo ratings yet
- M0C5 - M0C7 - NA - V1.01 Parts Catalog 3710Document48 pagesM0C5 - M0C7 - NA - V1.01 Parts Catalog 3710juan carlos selisNo ratings yet
- LeasePlan-Vehicle Lead-TimesDocument52 pagesLeasePlan-Vehicle Lead-TimesxvantrigtNo ratings yet
- Porsche Experience 2021Document24 pagesPorsche Experience 2021vantizya watirsonNo ratings yet
- Crushing and Screening Equipment Handbook (Low Res)Document42 pagesCrushing and Screening Equipment Handbook (Low Res)Kaiser CarloNo ratings yet
- Lister Petter Ts TR TX WMDocument121 pagesLister Petter Ts TR TX WMJose Rafael Lemus Bueno100% (1)
- MSTE 2 - Part 1Document2 pagesMSTE 2 - Part 1aisen agustinNo ratings yet
- Office of The Building OfficialDocument2 pagesOffice of The Building OfficialJanico Lanz BernalNo ratings yet
- KZ550 - GT550 G1-G9 Part 1Document68 pagesKZ550 - GT550 G1-G9 Part 1sucmass533No ratings yet
- 4730 4830 Self Propelled Sprayer Filter Overview With Service Intervals and CapacitiesDocument2 pages4730 4830 Self Propelled Sprayer Filter Overview With Service Intervals and CapacitiesAdriel GoisNo ratings yet
- Steering System: N35ZDR, N45ZR (C264) N30ZDR, N35-40ZR (D470) N30ZDRS, N35-40ZRS (A265)Document56 pagesSteering System: N35ZDR, N45ZR (C264) N30ZDR, N35-40ZR (D470) N30ZDRS, N35-40ZRS (A265)Linde Forklift100% (1)
- Spec Sheet Ctis 1 enDocument4 pagesSpec Sheet Ctis 1 enTomNo ratings yet
- Section 34 AR 49/2006 Pressure Equipment Safety Regulation: Retention of Certificates of Inspection PermitDocument1 pageSection 34 AR 49/2006 Pressure Equipment Safety Regulation: Retention of Certificates of Inspection PermitAlenNo ratings yet
- Car AssignmentDocument80 pagesCar AssignmentVineet SharmaNo ratings yet
- BMW 2 Series Active Tourer and Gran Tourer 2017 BrochureDocument36 pagesBMW 2 Series Active Tourer and Gran Tourer 2017 Brochurepetru100% (1)
- Design and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Document7 pagesDesign and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Ho Van RoiNo ratings yet
- Catalogo CAT PDFDocument1,007 pagesCatalogo CAT PDFLuis Garcia100% (1)
- Easa Biweekly 18-2021Document2 pagesEasa Biweekly 18-2021yuhusaNo ratings yet
- Mid 185 - Pid 84 - Fmi 2Document3 pagesMid 185 - Pid 84 - Fmi 2AkbarNo ratings yet
- Formula Student - Artificial Intelligence (Fs-Ai) 2020 RulesDocument26 pagesFormula Student - Artificial Intelligence (Fs-Ai) 2020 RulesJake ChoulesNo ratings yet
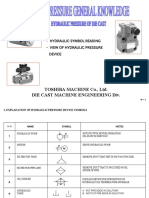
- Toshiba Machine Co., Ltd. Die Cast Machine Engineering DivDocument27 pagesToshiba Machine Co., Ltd. Die Cast Machine Engineering DivmikeNo ratings yet
- Machine Lab Manuals Final Modified On 12-2-2019Document67 pagesMachine Lab Manuals Final Modified On 12-2-2019Danyal NasirNo ratings yet
- Sequential Turbocharging Part3Document4 pagesSequential Turbocharging Part3Krzysztof DanileckiNo ratings yet
- ZF W1900 Data Sheet 042013Document4 pagesZF W1900 Data Sheet 042013LisandroNo ratings yet
- Chevrolet Captiva PDFDocument2 pagesChevrolet Captiva PDFLuffy11No ratings yet
- Hydrostatic Drive System SD110BDocument3 pagesHydrostatic Drive System SD110BNoor RahmanNo ratings yet
- 2NZ FeDocument8 pages2NZ FeRuth Nora García Izaguirre0% (1)
- BAC Product and Application HandbookDocument513 pagesBAC Product and Application HandbookyasserismailNo ratings yet