
The Magnetotelluric Inverse Problem
The Magnetotelluric Inverse Problem
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Ebook PDF Business Statistics A First Course 8th Edition PDFDocument41 pagesEbook PDF Business Statistics A First Course 8th Edition PDFmathew.floyd857100% (44)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Minh Quang Tran - The Art of Functional Programming-Independently Published (2022) PDFDocument205 pagesMinh Quang Tran - The Art of Functional Programming-Independently Published (2022) PDFXaviier Perezz100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MA 5165 Statistical Methods For Engineers 2 MarkDocument2 pagesMA 5165 Statistical Methods For Engineers 2 MarkBalakumar JaganathanNo ratings yet
- MALA XV Monitor Manual v1.5Document56 pagesMALA XV Monitor Manual v1.5Xaviier PerezzNo ratings yet
- Edition - 2013 - Encyclopedia of GIS (3) - Annotated PDFDocument2,504 pagesEdition - 2013 - Encyclopedia of GIS (3) - Annotated PDFXaviier PerezzNo ratings yet
- Sergei Winitzki - The Science of Functional Programming (Draft Version) - Lulu - Com (2021) PDFDocument638 pagesSergei Winitzki - The Science of Functional Programming (Draft Version) - Lulu - Com (2021) PDFXaviier PerezzNo ratings yet
- Refining Well Log Interpretation Techniques For Determining Brackish Aquifer Water QualityDocument191 pagesRefining Well Log Interpretation Techniques For Determining Brackish Aquifer Water QualityXaviier PerezzNo ratings yet
- Inversion of Electrical Resistivity Data: A ReviewDocument7 pagesInversion of Electrical Resistivity Data: A ReviewXaviier PerezzNo ratings yet
- An Introduction To Reservoir Simulation Using MATLAB GNU OctaveDocument678 pagesAn Introduction To Reservoir Simulation Using MATLAB GNU OctaveXaviier PerezzNo ratings yet
- Table of Contents021Document8 pagesTable of Contents021glhnn安.No ratings yet
- Block Hunter Federated Learning For Cyber Threat HDocument10 pagesBlock Hunter Federated Learning For Cyber Threat HRajesh BembadiNo ratings yet
- The Lower Extremity Functional Scale (LEFS) : Scale Development, Measurement Properties, and Clinical ApplicationDocument13 pagesThe Lower Extremity Functional Scale (LEFS) : Scale Development, Measurement Properties, and Clinical ApplicationAndres Ricardo Beltran DiazNo ratings yet
- OLA - Research Engineer AI IITRDocument2 pagesOLA - Research Engineer AI IITRSudip ManchareNo ratings yet
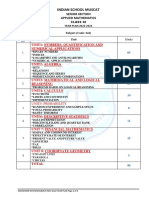
- 2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Document3 pages2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Kashish SabhnaniNo ratings yet
- Yenesew FeredeDocument111 pagesYenesew FeredelulumokeninNo ratings yet
- Zoology PGDocument50 pagesZoology PGshivanshusinghrajput4No ratings yet
- Icoy GroupDocument16 pagesIcoy GroupMegan MahusayNo ratings yet
- A Study On Kudumbashree in Kerala: ArticleDocument9 pagesA Study On Kudumbashree in Kerala: Articlesanskriti kathpaliaNo ratings yet
- BAED STAT2112 Statistics and Probability Second Quarter ExamDocument51 pagesBAED STAT2112 Statistics and Probability Second Quarter ExamKhynth Ezykyl CorroNo ratings yet
- Research FinalDocument40 pagesResearch Finalowengwapo84No ratings yet
- Correlational Research and Survey ResearchDocument31 pagesCorrelational Research and Survey ResearchSiti Maulida KamaliyahNo ratings yet
- Singh Kuldeep - Singh Mahabir - Relationship of Need For Achievement With Performance of Volleyball PlayersDocument3 pagesSingh Kuldeep - Singh Mahabir - Relationship of Need For Achievement With Performance of Volleyball PlayersDevi Sagita RatriNo ratings yet
- Lecture 3Document80 pagesLecture 3Lee Li HengNo ratings yet
- Open Screenshot 2023-12-13 at 8.06.13 PM 26Document56 pagesOpen Screenshot 2023-12-13 at 8.06.13 PM 26jatinderNo ratings yet
- 3 The Impact of RemittancesDocument9 pages3 The Impact of RemittancesMd. Saiful IslamNo ratings yet
- Lampiran Uji ValiditasDocument3 pagesLampiran Uji ValiditasAndi Aso Amir RisaldiNo ratings yet
- Econometrics Assignment 1Document7 pagesEconometrics Assignment 1Adwik RajeshNo ratings yet
- Regression Analysis: Causal Relationship Between The Explanatory andDocument17 pagesRegression Analysis: Causal Relationship Between The Explanatory andRachel Ann Quitaneg-AcenasNo ratings yet
- UNIT-1 What Is HR Analytics?Document74 pagesUNIT-1 What Is HR Analytics?mukul dish ahirwarNo ratings yet
- Relationships Among Acceptance of Self, Acceptance of Others, and MMPI ScoresDocument6 pagesRelationships Among Acceptance of Self, Acceptance of Others, and MMPI Scoreskafi naNo ratings yet
- Unet 2Document11 pagesUnet 2okuwobiNo ratings yet
- Procurement Fraud in The Construction Industry - The Nigerian Public Private Patnership (PPP) Dilemma By: Abubkr MurnaiDocument34 pagesProcurement Fraud in The Construction Industry - The Nigerian Public Private Patnership (PPP) Dilemma By: Abubkr Murnaiabubakar umar murnai murnaiNo ratings yet
- Modern Digital Communication: Statistical AveragesDocument25 pagesModern Digital Communication: Statistical AveragesSusheelkumar SreedharanNo ratings yet
- Psychology Themes and Variations 9th Edition Wayne Weiten Solutions ManualDocument7 pagesPsychology Themes and Variations 9th Edition Wayne Weiten Solutions ManualAndreCarterwfyp100% (31)
- Lampiran Lampiran 1. Kuisioner Morse Fall Scale (MFS)Document12 pagesLampiran Lampiran 1. Kuisioner Morse Fall Scale (MFS)Novi TiaraNo ratings yet
- Research 123Document49 pagesResearch 123bryanbagusss0814No ratings yet
- Nalini - Bangalore PublicationDocument6 pagesNalini - Bangalore PublicationWeb Research100% (1)












































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Ebook PDF Business Statistics A First Course 8th Edition PDFDocument41 pagesEbook PDF Business Statistics A First Course 8th Edition PDFmathew.floyd857100% (44)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Minh Quang Tran - The Art of Functional Programming-Independently Published (2022) PDFDocument205 pagesMinh Quang Tran - The Art of Functional Programming-Independently Published (2022) PDFXaviier Perezz100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MA 5165 Statistical Methods For Engineers 2 MarkDocument2 pagesMA 5165 Statistical Methods For Engineers 2 MarkBalakumar JaganathanNo ratings yet
- MALA XV Monitor Manual v1.5Document56 pagesMALA XV Monitor Manual v1.5Xaviier PerezzNo ratings yet
- Edition - 2013 - Encyclopedia of GIS (3) - Annotated PDFDocument2,504 pagesEdition - 2013 - Encyclopedia of GIS (3) - Annotated PDFXaviier PerezzNo ratings yet
- Sergei Winitzki - The Science of Functional Programming (Draft Version) - Lulu - Com (2021) PDFDocument638 pagesSergei Winitzki - The Science of Functional Programming (Draft Version) - Lulu - Com (2021) PDFXaviier PerezzNo ratings yet
- Refining Well Log Interpretation Techniques For Determining Brackish Aquifer Water QualityDocument191 pagesRefining Well Log Interpretation Techniques For Determining Brackish Aquifer Water QualityXaviier PerezzNo ratings yet
- Inversion of Electrical Resistivity Data: A ReviewDocument7 pagesInversion of Electrical Resistivity Data: A ReviewXaviier PerezzNo ratings yet
- An Introduction To Reservoir Simulation Using MATLAB GNU OctaveDocument678 pagesAn Introduction To Reservoir Simulation Using MATLAB GNU OctaveXaviier PerezzNo ratings yet
- Table of Contents021Document8 pagesTable of Contents021glhnn安.No ratings yet
- Block Hunter Federated Learning For Cyber Threat HDocument10 pagesBlock Hunter Federated Learning For Cyber Threat HRajesh BembadiNo ratings yet
- The Lower Extremity Functional Scale (LEFS) : Scale Development, Measurement Properties, and Clinical ApplicationDocument13 pagesThe Lower Extremity Functional Scale (LEFS) : Scale Development, Measurement Properties, and Clinical ApplicationAndres Ricardo Beltran DiazNo ratings yet
- OLA - Research Engineer AI IITRDocument2 pagesOLA - Research Engineer AI IITRSudip ManchareNo ratings yet
- 2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Document3 pages2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Kashish SabhnaniNo ratings yet
- Yenesew FeredeDocument111 pagesYenesew FeredelulumokeninNo ratings yet
- Zoology PGDocument50 pagesZoology PGshivanshusinghrajput4No ratings yet
- Icoy GroupDocument16 pagesIcoy GroupMegan MahusayNo ratings yet
- A Study On Kudumbashree in Kerala: ArticleDocument9 pagesA Study On Kudumbashree in Kerala: Articlesanskriti kathpaliaNo ratings yet
- BAED STAT2112 Statistics and Probability Second Quarter ExamDocument51 pagesBAED STAT2112 Statistics and Probability Second Quarter ExamKhynth Ezykyl CorroNo ratings yet
- Research FinalDocument40 pagesResearch Finalowengwapo84No ratings yet
- Correlational Research and Survey ResearchDocument31 pagesCorrelational Research and Survey ResearchSiti Maulida KamaliyahNo ratings yet
- Singh Kuldeep - Singh Mahabir - Relationship of Need For Achievement With Performance of Volleyball PlayersDocument3 pagesSingh Kuldeep - Singh Mahabir - Relationship of Need For Achievement With Performance of Volleyball PlayersDevi Sagita RatriNo ratings yet
- Lecture 3Document80 pagesLecture 3Lee Li HengNo ratings yet
- Open Screenshot 2023-12-13 at 8.06.13 PM 26Document56 pagesOpen Screenshot 2023-12-13 at 8.06.13 PM 26jatinderNo ratings yet
- 3 The Impact of RemittancesDocument9 pages3 The Impact of RemittancesMd. Saiful IslamNo ratings yet
- Lampiran Uji ValiditasDocument3 pagesLampiran Uji ValiditasAndi Aso Amir RisaldiNo ratings yet
- Econometrics Assignment 1Document7 pagesEconometrics Assignment 1Adwik RajeshNo ratings yet
- Regression Analysis: Causal Relationship Between The Explanatory andDocument17 pagesRegression Analysis: Causal Relationship Between The Explanatory andRachel Ann Quitaneg-AcenasNo ratings yet
- UNIT-1 What Is HR Analytics?Document74 pagesUNIT-1 What Is HR Analytics?mukul dish ahirwarNo ratings yet
- Relationships Among Acceptance of Self, Acceptance of Others, and MMPI ScoresDocument6 pagesRelationships Among Acceptance of Self, Acceptance of Others, and MMPI Scoreskafi naNo ratings yet
- Unet 2Document11 pagesUnet 2okuwobiNo ratings yet
- Procurement Fraud in The Construction Industry - The Nigerian Public Private Patnership (PPP) Dilemma By: Abubkr MurnaiDocument34 pagesProcurement Fraud in The Construction Industry - The Nigerian Public Private Patnership (PPP) Dilemma By: Abubkr Murnaiabubakar umar murnai murnaiNo ratings yet
- Modern Digital Communication: Statistical AveragesDocument25 pagesModern Digital Communication: Statistical AveragesSusheelkumar SreedharanNo ratings yet
- Psychology Themes and Variations 9th Edition Wayne Weiten Solutions ManualDocument7 pagesPsychology Themes and Variations 9th Edition Wayne Weiten Solutions ManualAndreCarterwfyp100% (31)
- Lampiran Lampiran 1. Kuisioner Morse Fall Scale (MFS)Document12 pagesLampiran Lampiran 1. Kuisioner Morse Fall Scale (MFS)Novi TiaraNo ratings yet
- Research 123Document49 pagesResearch 123bryanbagusss0814No ratings yet
- Nalini - Bangalore PublicationDocument6 pagesNalini - Bangalore PublicationWeb Research100% (1)