Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- DC Motor Speed ControlDocument54 pagesDC Motor Speed ControlAbhishek Gupta100% (3)
- PX5202 - SSDC Question BankDocument21 pagesPX5202 - SSDC Question BankRoja50% (2)
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Dual ConverterDocument11 pagesDual ConverterRoshan GokheNo ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- 06533563Document8 pages06533563MadhavanIceNo ratings yet
- Modeling and Controlling of ConverterDocument9 pagesModeling and Controlling of ConverterPriyanshu MishraNo ratings yet
- IJETR031989Document5 pagesIJETR031989erpublicationNo ratings yet
- boost+DC MotorDocument7 pagesboost+DC Motorsaqib khalidNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Chapter 4 PDFDocument62 pagesChapter 4 PDFMuhamad AmmarNo ratings yet
- Design and Implementation of 400A Industrial Inverter Welding MachineDocument6 pagesDesign and Implementation of 400A Industrial Inverter Welding Machineiqbal husseinNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocument5 pagesSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNo ratings yet
- Nan Kalayar HlaingDocument5 pagesNan Kalayar HlaingThet TinNo ratings yet
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- High Efficiency Power Conversion Using A Matrix Converter: Jun-Ichi Itoh Akihiro Odaka Ikuya SatoDocument0 pagesHigh Efficiency Power Conversion Using A Matrix Converter: Jun-Ichi Itoh Akihiro Odaka Ikuya Satomenilanjan89nLNo ratings yet
- Irjet V4i1140 PDFDocument5 pagesIrjet V4i1140 PDFMohamed AhmedNo ratings yet
- Report On Lecture 37Document3 pagesReport On Lecture 37Surajit SahaNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiNo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiNo ratings yet
- DC Motor Speed Control: Bayan University For Science & TechnologyDocument12 pagesDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNo ratings yet
- Comparative Performance Analysis of Boost Converter and Luo Converter For Controllinng of DC Motor SpeedDocument8 pagesComparative Performance Analysis of Boost Converter and Luo Converter For Controllinng of DC Motor SpeedguruvigneshnzNo ratings yet
- An-1048 (1) BLDC Driver LossDocument9 pagesAn-1048 (1) BLDC Driver LossDeepa DevarajNo ratings yet
- A Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeDocument10 pagesA Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeTJPRC PublicationsNo ratings yet
- Answer QB 2Document22 pagesAnswer QB 2Goud SannyNo ratings yet
- Three Phase Induction Motor Using Single PhaseDocument8 pagesThree Phase Induction Motor Using Single PhasehezugNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNo ratings yet
- InverterDocument26 pagesInverteravijeet2828No ratings yet
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocument9 pagesClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravNo ratings yet
- A New Topology For Unipolar Brushless DC Motor DriveDocument55 pagesA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06No ratings yet
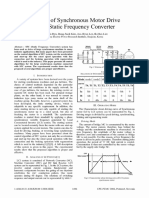
- A Study of Synchronous Motor Drive Using SFC PDFDocument4 pagesA Study of Synchronous Motor Drive Using SFC PDFBrian GuevaraNo ratings yet
- Transformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemDocument7 pagesTransformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemStudents Xerox ChidambaramNo ratings yet
- Micrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 CycloconverterDocument32 pagesMicrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 Cycloconverterपंकज काळेNo ratings yet
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoNo ratings yet
- Design and Implementation of ZCS BUCK CONVERTERDocument51 pagesDesign and Implementation of ZCS BUCK CONVERTERAriful Haque100% (1)
- Analogue Communications ReportDocument12 pagesAnalogue Communications ReportNitesh ChaurasiyaNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument5 pagesSpeed Control of DC Motor Using Pulse Width ModulationSyed muhammad zaidi100% (1)
- Flyback Converter - WikipediaDocument3 pagesFlyback Converter - WikipediaRobert MasipNo ratings yet
- Microchip CLC DescriptionDocument12 pagesMicrochip CLC DescriptionKamlesh YadavNo ratings yet
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- How To Drive DC Motors With Smart Power IcsDocument14 pagesHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićNo ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- FGA300 V User's GuideDocument172 pagesFGA300 V User's GuideEnrique AntonioNo ratings yet
- Floor Plan: Project Title Sheet Content Designed by Sheet No. 1 5Document5 pagesFloor Plan: Project Title Sheet Content Designed by Sheet No. 1 5Pamaypay NaasulNo ratings yet
- Photocatalytic of N Doped Tio2 Nanofibers Prepared by ElectrospinningDocument6 pagesPhotocatalytic of N Doped Tio2 Nanofibers Prepared by ElectrospinningPost BozNo ratings yet
- PQL Option - 1: Citywide Energy Consulting Services (RFQ #857 19QL001) Updated Release Date 3/19/2021Document1 pagePQL Option - 1: Citywide Energy Consulting Services (RFQ #857 19QL001) Updated Release Date 3/19/2021riddhiNo ratings yet
- Dispenser User ManualDocument80 pagesDispenser User ManualsureshNo ratings yet
- Integrating Mining Industries Towards Sustainable DevelopmentDocument12 pagesIntegrating Mining Industries Towards Sustainable DevelopmentAndrew John CellonaNo ratings yet
- Mled ELP 33: XXX/X/XXX/XX/XXDocument2 pagesMled ELP 33: XXX/X/XXX/XX/XXJaideep SinghNo ratings yet
- Electro 323Document2 pagesElectro 323Pușcă MartinNo ratings yet
- Parallel Plate CapacitorDocument3 pagesParallel Plate CapacitorSanNo ratings yet
- Quality Changes The World: Selling PointsDocument2 pagesQuality Changes The World: Selling PointsMemeng 51No ratings yet
- Difference Between Atmospheric Distillation and Vacuum DistillationDocument3 pagesDifference Between Atmospheric Distillation and Vacuum DistillationMuhammad SultanNo ratings yet
- Samad Wicaksono Sulistyo Djakfar - BRT Yogyakarta IPA QFDDocument9 pagesSamad Wicaksono Sulistyo Djakfar - BRT Yogyakarta IPA QFDDoni Saputra RamadhanNo ratings yet
- CONFERENCE Program: Sunday December 2, 2018 Opening CeremonyDocument13 pagesCONFERENCE Program: Sunday December 2, 2018 Opening CeremonyMahdi LabedNo ratings yet
- Fluid IIDocument2 pagesFluid IIJefara 01No ratings yet
- Uep QB1Document3 pagesUep QB1guru32439No ratings yet
- 1.4 Stoddard CycleDocument6 pages1.4 Stoddard Cyclegangathiran20No ratings yet
- Thermal Science and Engineering Progress: Tayebeh Darbandi, Mikael Risberg, Lars WesterlundDocument9 pagesThermal Science and Engineering Progress: Tayebeh Darbandi, Mikael Risberg, Lars WesterlundSaleel ChuriNo ratings yet
- Chemical Engineering Calculations - Midterm ExamDocument12 pagesChemical Engineering Calculations - Midterm ExamJohnNo ratings yet
- Zero-Pressure Gas Regulator Hon 324: Product InformationDocument8 pagesZero-Pressure Gas Regulator Hon 324: Product InformationAhmed Mohamed RedaNo ratings yet
- A Systematic Methodology For Accurate Design-StageDocument14 pagesA Systematic Methodology For Accurate Design-Stagegurtekinkubra8No ratings yet
- Velan Forged Steel ValvesDocument43 pagesVelan Forged Steel Valvesjacquesstrappe06No ratings yet
- Voltaic Cells: Environmental CareDocument1 pageVoltaic Cells: Environmental CareManavNo ratings yet
- Chemical Mechanism Development and Reduction For Combustion ofDocument13 pagesChemical Mechanism Development and Reduction For Combustion ofAhmed YasiryNo ratings yet
- Wheeled Tractor YTO X704 Technical SpecificationDocument2 pagesWheeled Tractor YTO X704 Technical SpecificationEngrais SupermixNo ratings yet
- 2022-07-01 - BOM Cable Schedule Makassar - Rev.1Document18 pages2022-07-01 - BOM Cable Schedule Makassar - Rev.1Teguh WahyonoNo ratings yet
- Kitchens Catalogue 2021Document40 pagesKitchens Catalogue 2021Rai SahibNo ratings yet
- Aluminum Electrolytic Capacitors (Radial Lead Type) Series: FC Type: ADocument10 pagesAluminum Electrolytic Capacitors (Radial Lead Type) Series: FC Type: AgaddNo ratings yet
- Check Shift Oil PressureDocument2 pagesCheck Shift Oil PressureGeorgeNo ratings yet
- Service Publications: Number SubjectDocument9 pagesService Publications: Number SubjectLeoNo ratings yet
- UntitledDocument25 pagesUntitledarifazmiNo ratings yet