Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0From EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Rating: 5 out of 5 stars5/5 (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitFrom EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 4 out of 5 stars4/5 (4)
- Substation Automation Systems: Design and ImplementationFrom EverandSubstation Automation Systems: Design and ImplementationRating: 4.5 out of 5 stars4.5/5 (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (1)
- Abc of Power Modules: Functionality, Structure and Handling of a Power ModuleFrom EverandAbc of Power Modules: Functionality, Structure and Handling of a Power ModuleNo ratings yet
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- The Internet of Things: Key Applications and ProtocolsFrom EverandThe Internet of Things: Key Applications and ProtocolsRating: 5 out of 5 stars5/5 (1)
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- Engineering the CMOS Library: Enhancing Digital Design Kits for Competitive SiliconFrom EverandEngineering the CMOS Library: Enhancing Digital Design Kits for Competitive SiliconRating: 1 out of 5 stars1/5 (1)
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Handbook of Microwave Component Measurements: with Advanced VNA TechniquesFrom EverandHandbook of Microwave Component Measurements: with Advanced VNA TechniquesRating: 4 out of 5 stars4/5 (1)
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsFrom EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Mosfet Canal P 2sj 221Document7 pagesMosfet Canal P 2sj 221jose gomezNo ratings yet
- Outline: Junction and MOS Electrostatics (III)Document17 pagesOutline: Junction and MOS Electrostatics (III)garu1991No ratings yet
- UT Dallas Syllabus For Eemf6321.501.11s Taught by William Frensley (Frensley)Document5 pagesUT Dallas Syllabus For Eemf6321.501.11s Taught by William Frensley (Frensley)UT Dallas Provost's Technology GroupNo ratings yet
- Nov 17 Analog Electronics Circuit (ICE 2104)Document2 pagesNov 17 Analog Electronics Circuit (ICE 2104)Chinmay DharmikNo ratings yet
- Vlsi Design Question Bank EEC 703Document10 pagesVlsi Design Question Bank EEC 703selvi0412No ratings yet
- EDC - Old Question Papers For Unit 3, 4, 5Document19 pagesEDC - Old Question Papers For Unit 3, 4, 5Deepak SahuNo ratings yet
- Sony Kdl-32fa500 Kdl-37fa500 Chassis Ma2Document100 pagesSony Kdl-32fa500 Kdl-37fa500 Chassis Ma2José Manuel GonzálezNo ratings yet
- EC8353 EDC Syllabus PDFDocument1 pageEC8353 EDC Syllabus PDFDharani KumarNo ratings yet
- Powerflex: Operating ManualDocument16 pagesPowerflex: Operating Manualjap0258No ratings yet
- A Safe Method For Spot Welding v1.11 5 12Document11 pagesA Safe Method For Spot Welding v1.11 5 12Petar Ivan100% (1)
- Paralleling of IGBT Modules - 5SYA 2098 - 25082013Document10 pagesParalleling of IGBT Modules - 5SYA 2098 - 25082013JoseNo ratings yet
- En CD00003897 PDFDocument7 pagesEn CD00003897 PDFJosias AndradeNo ratings yet
- EDC FinalDocument4 pagesEDC FinalRatish DhimanNo ratings yet
- Component Tester Complete ManualDocument131 pagesComponent Tester Complete ManualwdummertNo ratings yet
- Edc Lab-1 Manual-2Document91 pagesEdc Lab-1 Manual-2Ashish SharmaNo ratings yet
- Intersil ISL9238IRTZ DatasheetDocument45 pagesIntersil ISL9238IRTZ Datasheetxingyiservice.mdy123No ratings yet
- Week 14 Quiz 3: Modern Mosfets ECE 606: Solid State DevicesDocument1 pageWeek 14 Quiz 3: Modern Mosfets ECE 606: Solid State DevicesjubairrubyNo ratings yet
- Toshiba TK100E10N1, S1X (S DatasheetDocument9 pagesToshiba TK100E10N1, S1X (S DatasheetElectrical Power EngineeringNo ratings yet
- VLSIDocument22 pagesVLSIMoulana YasinNo ratings yet
- Ege Ge Egege eDocument8 pagesEge Ge Egege eAjay Kumar PrajapatiNo ratings yet
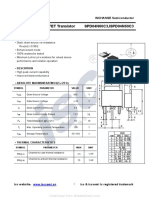
- Isc N-Channel MOSFET Transistor SPD04N60C3, ISPD04N60C3: INCHANGE SemiconductorDocument2 pagesIsc N-Channel MOSFET Transistor SPD04N60C3, ISPD04N60C3: INCHANGE Semiconductorjavier venturaNo ratings yet
- Cmos Paper Mid 1Document4 pagesCmos Paper Mid 1venkiscribd444No ratings yet
- Fet As VCRDocument6 pagesFet As VCRRicha GuptaNo ratings yet
- A Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationsDocument3 pagesA Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationslionpjrNo ratings yet
- 1988 National Linear Databook Volume 2 PDFDocument934 pages1988 National Linear Databook Volume 2 PDFFLAVIO100% (1)
- Sla 7027Document8 pagesSla 7027manuals2011No ratings yet
- Transistors and Logic GatesDocument17 pagesTransistors and Logic GatesJef SotisNo ratings yet
- Circuit Techniques For Low-Voltage and High-Speed AD ConvertersDocument256 pagesCircuit Techniques For Low-Voltage and High-Speed AD ConvertersAnkurNo ratings yet
- NTS Solved Electrical - Electronics MCQS UpdateDocument14 pagesNTS Solved Electrical - Electronics MCQS Updatekoi naiNo ratings yet
- The Future of Ferroelectric Field-Effect Transistor TechnologyDocument10 pagesThe Future of Ferroelectric Field-Effect Transistor TechnologyADITYA SHARMANo ratings yet