Download as pdf or txt
You might also like
- Quiz - Attempt ReviewDocument11 pagesQuiz - Attempt ReviewBoris Montoya100% (1)
- Question Laboratory Task 1 Sesi120212022Document7 pagesQuestion Laboratory Task 1 Sesi120212022Miza Oh MizaNo ratings yet
- DLD 5 Lab ReportsDocument25 pagesDLD 5 Lab ReportsHamza Shah100% (1)
- Adder Notes MergedDocument63 pagesAdder Notes MergedPavan SinghNo ratings yet
- Combinational Logic CircuitsDocument17 pagesCombinational Logic CircuitsAdarsha Bhattarai100% (1)
- DESIGN A DIGITAL VOLTMETER USING 8051 MICROCONTROLER Chapter 4 FinalDocument8 pagesDESIGN A DIGITAL VOLTMETER USING 8051 MICROCONTROLER Chapter 4 FinalNiyati VashishtNo ratings yet
- The Digital Encoder: 4-To-2 Bit Binary EncoderDocument10 pagesThe Digital Encoder: 4-To-2 Bit Binary EncoderJohn Brix BalisterosNo ratings yet
- Bee Lab ManualDocument62 pagesBee Lab ManualSwetha VanamNo ratings yet
- Chapter 3 - Ex-FF-DDocument7 pagesChapter 3 - Ex-FF-DMinh PhúNo ratings yet
- 1-Introduction To Semiconductor MaterialsDocument43 pages1-Introduction To Semiconductor MaterialsStevie AdrielNo ratings yet
- Approximations On DiodesDocument3 pagesApproximations On DiodesJudyNo ratings yet
- ADC and DACDocument4 pagesADC and DACjeniferNo ratings yet
- Adc ConversionDocument20 pagesAdc Conversionhemantec100% (1)
- 15 Electronics in Renewable Energy SystemsDocument25 pages15 Electronics in Renewable Energy SystemsHmaedNo ratings yet
- Laser Printer2Document21 pagesLaser Printer2lovleshrubyNo ratings yet
- Unit I Basic Circuits AnalysisDocument36 pagesUnit I Basic Circuits AnalysisHarvey PingcasNo ratings yet
- Integrated CircuitsDocument43 pagesIntegrated Circuitsgovardhan50No ratings yet
- Lecture 23Document43 pagesLecture 23AdribonNo ratings yet
- Digitech MultimeterDocument7 pagesDigitech Multimeterpropaganda65No ratings yet
- 2 Bit Comparator PDFDocument12 pages2 Bit Comparator PDFSunith CkNo ratings yet
- Micro 131L Lab Experiment 12 13 Servo and Stepper Motor in Arduino BoardDocument23 pagesMicro 131L Lab Experiment 12 13 Servo and Stepper Motor in Arduino BoardELLAINE DE CLARONo ratings yet
- Module-2 Complete NotesDocument31 pagesModule-2 Complete NotesManjuanthNo ratings yet
- The Demultiplexer Lecture NotesDocument4 pagesThe Demultiplexer Lecture Notesraul gironella100% (1)
- Physics NotesDocument183 pagesPhysics NotesPrashant ShuklaNo ratings yet
- MSDFFDocument20 pagesMSDFFShweta KumariNo ratings yet
- Interfacing Programs For 8085Document37 pagesInterfacing Programs For 8085archankumarturagaNo ratings yet
- Thang Thesis FinalDocument125 pagesThang Thesis Finalkwedjeu ronaldNo ratings yet
- Logical Gates (And, Or, Not, Nand, NOR, EX-OR and EX-NOR) and PLC Ladder Logic For Logical GatesDocument19 pagesLogical Gates (And, Or, Not, Nand, NOR, EX-OR and EX-NOR) and PLC Ladder Logic For Logical GatesSerxhino KorreshiNo ratings yet
- Project On Logic Gate (Not Gate)Document3 pagesProject On Logic Gate (Not Gate)ANSHUMAN SAGARNo ratings yet
- 31 IJAEMS AUG 2016 11 Density Based Traffic ControlDocument6 pages31 IJAEMS AUG 2016 11 Density Based Traffic ControlSreenath SreenathNo ratings yet
- MP Notes 1675143848Document80 pagesMP Notes 1675143848gokul docNo ratings yet
- Block Diagram of 8085Document32 pagesBlock Diagram of 8085Shabd ShashankNo ratings yet
- Real Time DC Motor Speed Control Using Pid in Labview With ArduinoDocument3 pagesReal Time DC Motor Speed Control Using Pid in Labview With ArduinoabsalnabiNo ratings yet
- Chapter 4: Basics of Digital Electronics: Logic GatesDocument19 pagesChapter 4: Basics of Digital Electronics: Logic GatesSyed ShaNo ratings yet
- Circuit TodayDocument30 pagesCircuit TodayBrian GiriNo ratings yet
- Dual Slope ADCDocument3 pagesDual Slope ADCHero HeroNo ratings yet
- I2c 2004 LCDDocument26 pagesI2c 2004 LCDizaqui bernardoNo ratings yet
- Enhancing The Data Security of Simple Columnar Transposition Cipher by Caesar Cipher and Rail Fence Cipher Technique.Document8 pagesEnhancing The Data Security of Simple Columnar Transposition Cipher by Caesar Cipher and Rail Fence Cipher Technique.Muh ElbinNo ratings yet
- Lec - A-03 - Introduction To Digital Logic and Boolean Algebra 1920Document112 pagesLec - A-03 - Introduction To Digital Logic and Boolean Algebra 1920hbfagfjafasebaNo ratings yet
- Digital Storage OscilloscopeDocument9 pagesDigital Storage OscilloscopeamrithaNo ratings yet
- Microprocessor Microcontroller RESIT 2021 MGDocument9 pagesMicroprocessor Microcontroller RESIT 2021 MGRene EBUNLE AKUPANNo ratings yet
- Electronic Devices and Circuits LabDocument86 pagesElectronic Devices and Circuits LabAgalyaNo ratings yet
- Lecture Presentation 1Document105 pagesLecture Presentation 1Ahmet SancakNo ratings yet
- Experiment 1 Breadboard ImplementationDocument3 pagesExperiment 1 Breadboard ImplementationJeremy Lorenzo Teodoro VirataNo ratings yet
- Due: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012Document3 pagesDue: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012amastasia salsaNo ratings yet
- Two Mark Questions For DSDDocument17 pagesTwo Mark Questions For DSDvnirmalacseNo ratings yet
- Micro ProcesserDocument18 pagesMicro ProcesserChaitali Binzade0% (1)
- DEL ManualDocument94 pagesDEL ManualAnand BongirNo ratings yet
- Design and Development of Arduino Based Automatic Fan Control System Using PIR and LM 35 SensorDocument12 pagesDesign and Development of Arduino Based Automatic Fan Control System Using PIR and LM 35 SensorEzekiel Dela Pena0% (1)
- MIT Subthreshold OperationDocument29 pagesMIT Subthreshold Operationsanjeevsoni64No ratings yet
- Seven Segment Display Document PDFDocument16 pagesSeven Segment Display Document PDFRekha MudalagiriNo ratings yet
- Computer Architecture and Organization Chapter 1Document64 pagesComputer Architecture and Organization Chapter 1አኖኒ መስNo ratings yet
- Arduino ppt-1Document25 pagesArduino ppt-1Aman NaikyaNo ratings yet
- EP Manual Master Final 28-01-10 New1Document97 pagesEP Manual Master Final 28-01-10 New1jiyadarjiNo ratings yet
- Ram RomDocument42 pagesRam Rommohit mishraNo ratings yet
- 4017 Decade CounterDocument8 pages4017 Decade CounterSarah Q N HidayatNo ratings yet
- DC Motor Simulation Using LTSpiceDocument7 pagesDC Motor Simulation Using LTSpiceMizael AlvesNo ratings yet
- Qca Project PPTDocument20 pagesQca Project PPTPandu KNo ratings yet
- Encoders and DecodersDocument15 pagesEncoders and DecodersBhushan NagpureNo ratings yet
- EncodersDocument8 pagesEncoderssuresh mariappanNo ratings yet
- 2 To 4 Decoder: 7) Decoder Is A Combinational Circuit That Has N' Input Lines and Maximum of 2Document18 pages2 To 4 Decoder: 7) Decoder Is A Combinational Circuit That Has N' Input Lines and Maximum of 2Biruh TesfaNo ratings yet
- Unit 3 1.A) .Machine InstructionsDocument13 pagesUnit 3 1.A) .Machine InstructionsLovely VasanthNo ratings yet
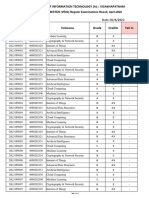
- VR20 - 2-1 - MCA-Reg - Result - APR - 22Document9 pagesVR20 - 2-1 - MCA-Reg - Result - APR - 22Lovely VasanthNo ratings yet
- C Language Unit 1,2,3,4,5Document247 pagesC Language Unit 1,2,3,4,5Lovely VasanthNo ratings yet
- Online Auditorium Booking: Domain: DBMS Front End: HTML, CSSDocument2 pagesOnline Auditorium Booking: Domain: DBMS Front End: HTML, CSSLovely VasanthNo ratings yet
- CPE18 Module1Document16 pagesCPE18 Module1Angelica Rose ExcondeNo ratings yet
- Po USB12Document1 pagePo USB12proepro100% (1)
- Mesa DMX (Manual)Document12 pagesMesa DMX (Manual)Sérgio Paulo MúsicoNo ratings yet
- ATS8100Document1 pageATS8100Ciprian VargaNo ratings yet
- C Programs PDFDocument7 pagesC Programs PDFqwerty100% (1)
- SyserrDocument2 pagesSyserrdummassNo ratings yet
- TO Information and Computer Technology: Prepared byDocument13 pagesTO Information and Computer Technology: Prepared byMary Joy Rabida RanceNo ratings yet
- Mineralogy Tutorials Version 2.1 CD Mineralogy Tutorials InstallationDocument2 pagesMineralogy Tutorials Version 2.1 CD Mineralogy Tutorials InstallationCarol HarperNo ratings yet
- HP Proliant ML350gc 246 ServerDocument4 pagesHP Proliant ML350gc 246 ServerAntoize AhmadNo ratings yet
- 5G Time Synchronization BRKSPM-3295Document52 pages5G Time Synchronization BRKSPM-3295趙致鈞100% (1)
- Io in VlsiDocument32 pagesIo in VlsiSathyanarayana RaoNo ratings yet
- WinMax Mill Getting Started v9.1 - Nov2012Document218 pagesWinMax Mill Getting Started v9.1 - Nov2012Cosmin Ionut0% (1)
- s7122 Stephen Jones Cuda Optimization Tips Tricks and TechniquesDocument71 pagess7122 Stephen Jones Cuda Optimization Tips Tricks and Techniquesஇரா.பவித்ர குருNo ratings yet
- G41D3C 20200706Document2 pagesG41D3C 20200706Ghribi AminaNo ratings yet
- Session 6 - Week 3 BPMN Part 2Document41 pagesSession 6 - Week 3 BPMN Part 2HugoPrieto2No ratings yet
- Fundamentals of Software Engineering Course Outline 2017Document4 pagesFundamentals of Software Engineering Course Outline 2017Priyanshu PathakNo ratings yet
- Using Layer 2 Ethernet For High-Throughput, Real-Time ApplicationsDocument2 pagesUsing Layer 2 Ethernet For High-Throughput, Real-Time ApplicationsRahul Sreedharan SNo ratings yet
- 2020 Spring CSCI251 Lab PreliminaryDocument3 pages2020 Spring CSCI251 Lab PreliminaryMasud ZamanNo ratings yet
- Raxco PerfectDisk 14 UserGuideDocument307 pagesRaxco PerfectDisk 14 UserGuidememetic_2010No ratings yet
- x8 2 Datasheet PDFDocument5 pagesx8 2 Datasheet PDFRoy ValenciaNo ratings yet
- HP Officejet 6310 All-in-One Printer, Fax, Scanner, CopierDocument2 pagesHP Officejet 6310 All-in-One Printer, Fax, Scanner, CopierErxhan AhmetiNo ratings yet
- Optrex DMF 5005 NDocument1 pageOptrex DMF 5005 NroozbehxoxNo ratings yet
- C1815, NPN TransistorDocument2 pagesC1815, NPN Transistorabcx769No ratings yet
- Cse MCQ For Engineering 1st YearDocument21 pagesCse MCQ For Engineering 1st YearMohd Amir0% (1)
- IGS NT Hybrid User Guide r1Document21 pagesIGS NT Hybrid User Guide r1Shree KiranNo ratings yet
- Your Dell Quote - 3000169541210 - Server 450Document3 pagesYour Dell Quote - 3000169541210 - Server 450angel.vinacNo ratings yet
- Remnant v102 RETAiL WiN MAC PDFDocument4 pagesRemnant v102 RETAiL WiN MAC PDFDeniseNo ratings yet
- Srikanth NodeDocument6 pagesSrikanth NodeShiva Kumar Kalakonda100% (1)