Download as pdf or txt
You might also like
- Amada HA250W-400W Operators ManualDocument171 pagesAmada HA250W-400W Operators ManualmehrdadgeminiNo ratings yet
- Fire Safety Compliance ReportDocument16 pagesFire Safety Compliance ReportNta Engg50% (2)
- Fire and Smoke Detection Using Image Recognition SystemDocument29 pagesFire and Smoke Detection Using Image Recognition SystemAdrian LequiganNo ratings yet
- Understanding Fire and Gas MappingDocument26 pagesUnderstanding Fire and Gas MappinghiosmoNo ratings yet
- International Code FOR Fire Safety SystemsDocument10 pagesInternational Code FOR Fire Safety Systemsmustafa57No ratings yet
- Figure 5.1 3-Plane Chart For Smart Network Infrastructure For Fire Resilience (SNIFFR)Document10 pagesFigure 5.1 3-Plane Chart For Smart Network Infrastructure For Fire Resilience (SNIFFR)pvsreddy2002No ratings yet
- Ijarcce 2023 125137Document4 pagesIjarcce 2023 125137RushiNo ratings yet
- Atmosphere 11 01241 PDFDocument15 pagesAtmosphere 11 01241 PDFPeace CyebukayireNo ratings yet
- Efficient Deep CNN-Based Fire Detection and Localization in Video SurveillanceDocument9 pagesEfficient Deep CNN-Based Fire Detection and Localization in Video SurveillanceIJRASETPublicationsNo ratings yet
- Expert System For Building Fire Safety Analysis and Risk AssessmentDocument10 pagesExpert System For Building Fire Safety Analysis and Risk AssessmentJefferson WidodoNo ratings yet
- CNN Based Fire DtectionDocument10 pagesCNN Based Fire DtectionMuhammad Hilmi FaridhNo ratings yet
- A Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkDocument5 pagesA Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkWARSE JournalsNo ratings yet
- A Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkDocument5 pagesA Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkWARSE JournalsNo ratings yet
- A Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkDocument5 pagesA Prefatory Approach Towards Monitoring and Detection of Fire Outbreak Using Artificial Neural NetworkWARSE JournalsNo ratings yet
- Forest Fire Detection Using CNNDocument10 pagesForest Fire Detection Using CNNLumisense TechnologiesNo ratings yet
- Dependable Fire Detection System With MultifunctioDocument22 pagesDependable Fire Detection System With MultifunctioKatia Rania BITAMNo ratings yet
- Development of Fire Detection Systems in The Intelligent BuildingDocument14 pagesDevelopment of Fire Detection Systems in The Intelligent BuildingJagadeesh PraveenNo ratings yet
- 用于近实时数据驱动火灾探测和监测系统的热红外传感Document30 pages用于近实时数据驱动火灾探测和监测系统的热红外传感爱学习的小刘No ratings yet
- 33 PP 311 321 409Document11 pages33 PP 311 321 40900007sbrNo ratings yet
- Autonomous Fire-Detection System Using Adaptive Sensory Fusion For Intelligent Security RobotDocument8 pagesAutonomous Fire-Detection System Using Adaptive Sensory Fusion For Intelligent Security RobotUdhgeeth TechNo ratings yet
- Model-Based Automatic Fire Extinguisher System Using SVM in MatlabDocument4 pagesModel-Based Automatic Fire Extinguisher System Using SVM in MatlabChimaroke UmunnaNo ratings yet
- Intelligent Fire Detefction and Alarm SystemDocument7 pagesIntelligent Fire Detefction and Alarm SystemShivam Kumar MishraNo ratings yet
- Advancements in Fire Safety Technology: A Automatic Fire Extinguishing RobotDocument5 pagesAdvancements in Fire Safety Technology: A Automatic Fire Extinguishing RobotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IoT Based Forest Fire Detection - Final ManuscriptDocument10 pagesIoT Based Forest Fire Detection - Final ManuscriptHrithwik DhanapalNo ratings yet
- Electronics: Fire Detection Method in Smart City Environments Using A Deep-Learning-Based ApproachDocument17 pagesElectronics: Fire Detection Method in Smart City Environments Using A Deep-Learning-Based Approach백성하No ratings yet
- Convolutional Neural Networks Based Fire Detection in Surveillance VideosDocument9 pagesConvolutional Neural Networks Based Fire Detection in Surveillance VideosKashiVishwanathNo ratings yet
- Detection and Monitoring of Fire Accidents Using IOTDocument6 pagesDetection and Monitoring of Fire Accidents Using IOTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- FIREGUARD Research Paper - 120534Document5 pagesFIREGUARD Research Paper - 120534pefebad376No ratings yet
- 1lab Final1Document14 pages1lab Final1EDRICK PARASNo ratings yet
- Fire Detection With Image ProcessingDocument6 pagesFire Detection With Image ProcessingIJRASETPublicationsNo ratings yet
- A Framework For Intelligent Fire DetectionDocument7 pagesA Framework For Intelligent Fire DetectionzamriNo ratings yet
- Smart Fire Warning System IJERTV5IS010466Document4 pagesSmart Fire Warning System IJERTV5IS010466Deepak ReddyNo ratings yet
- New Framework of Intelligent Evacuation System of Bui - 2014 - Procedia EngineerDocument6 pagesNew Framework of Intelligent Evacuation System of Bui - 2014 - Procedia EngineerjanainaNo ratings yet
- Dec Ijmte - 1414Document7 pagesDec Ijmte - 1414Swastik JainNo ratings yet
- Citation 8Document11 pagesCitation 8Toka Mohamed ElSayedRadwanNo ratings yet
- Automated Fire Fighting Drone Fir Wild Life Fire Detection and ExtinguishingDocument4 pagesAutomated Fire Fighting Drone Fir Wild Life Fire Detection and Extinguishingriazahmed75760No ratings yet
- Conf Paper777Document7 pagesConf Paper777Faizan AsifNo ratings yet
- Intelligent Fire Extinguisher SystemDocument3 pagesIntelligent Fire Extinguisher SystemInternational Organization of Scientific Research (IOSR)No ratings yet
- A PROJECT REPORT Gas Leakage DetectionDocument22 pagesA PROJECT REPORT Gas Leakage DetectionAyash KatangaNo ratings yet
- Efficient Deep CNN-Based Fire Detection and Localization in Machine Learning Video Surveillance ApplicationsDocument9 pagesEfficient Deep CNN-Based Fire Detection and Localization in Machine Learning Video Surveillance ApplicationsIJRASETPublicationsNo ratings yet
- Fire Detection Using Deep Convolution Neural NetwoDocument6 pagesFire Detection Using Deep Convolution Neural Netwogarlakrishna86No ratings yet
- Fire Detection and Localization in Video Surveillance ApplicationDocument4 pagesFire Detection and Localization in Video Surveillance ApplicationIJARSCT JournalNo ratings yet
- Fire Extinguisher Types and ApplicationsDocument6 pagesFire Extinguisher Types and ApplicationsGJR PUBLICATIONNo ratings yet
- IoT Based Fire Alerting Smart SystemDocument5 pagesIoT Based Fire Alerting Smart SystemdebbieleeohyeahNo ratings yet
- 217 May2020Document9 pages217 May2020K.R.Pravein RameshNo ratings yet
- Case Studies in Thermal Engineering: Pu Li, Wangda ZhaoDocument11 pagesCase Studies in Thermal Engineering: Pu Li, Wangda ZhaoNihila BNo ratings yet
- Smart Fire Monitoring System For A City Design and DevelopmentDocument12 pagesSmart Fire Monitoring System For A City Design and DevelopmentEvans SansolisNo ratings yet
- ComSIS 504-1403Document29 pagesComSIS 504-1403Ivy JaniceNo ratings yet
- SAFIRE - Smart Arduino Based Fire Incident Response and EvaluationDocument23 pagesSAFIRE - Smart Arduino Based Fire Incident Response and Evaluationpapa-pNo ratings yet
- On The Use of Risk Concepts in Fire Safety EngineeDocument7 pagesOn The Use of Risk Concepts in Fire Safety EngineePaulRogerQuispeMalmaNo ratings yet
- Kenexis: Understanding Fire and Gas Mapping Software and EffigyDocument34 pagesKenexis: Understanding Fire and Gas Mapping Software and EffigyShakeel AhmedNo ratings yet
- EFFECTIVE FOREST FIRE DETECTION SYSTEM USING VISUAL IMAGES AND UNMANNED AERIAL VEHICLE Ijariie10993Document10 pagesEFFECTIVE FOREST FIRE DETECTION SYSTEM USING VISUAL IMAGES AND UNMANNED AERIAL VEHICLE Ijariie10993Hrutuj ShirkeNo ratings yet
- Fire and Human Detection Using Image Processing and Deep LearningDocument4 pagesFire and Human Detection Using Image Processing and Deep LearningIJRASETPublicationsNo ratings yet
- Fire Detection System Using NodemcuDocument13 pagesFire Detection System Using Nodemcupriya mNo ratings yet
- OTC-25016-MS 3-D Mapping For Fire and Gas Detection: Figure 1: Process Safety Layer of Typical FacilityDocument6 pagesOTC-25016-MS 3-D Mapping For Fire and Gas Detection: Figure 1: Process Safety Layer of Typical FacilityamripfsNo ratings yet
- Survey On Fire Detection Using Image ProcessingDocument10 pagesSurvey On Fire Detection Using Image ProcessingIJRASETPublicationsNo ratings yet
- 5.1.2 Problem: Chapter 5 Stationary SensorsDocument10 pages5.1.2 Problem: Chapter 5 Stationary Sensorspvsreddy2002No ratings yet
- Fire Sensor AlarmDocument20 pagesFire Sensor Alarmeafz111No ratings yet
- FLAME: A Parametric Fire Risk Assessment Method Supporting Performance Based ApproachesDocument45 pagesFLAME: A Parametric Fire Risk Assessment Method Supporting Performance Based Approachestheodoro nascimentoNo ratings yet
- Fire 06 00012Document17 pagesFire 06 00012fuenteslopezarelyNo ratings yet
- Uncertainty Theories and Multisensor Data FusionFrom EverandUncertainty Theories and Multisensor Data FusionAlain AppriouNo ratings yet
- Design Automation of Cyber-Physical SystemsFrom EverandDesign Automation of Cyber-Physical SystemsMohammad Abdullah Al FaruqueNo ratings yet
- Study On Network Public Opinion Dissemination and Coping S - 2014 - Procedia EngDocument6 pagesStudy On Network Public Opinion Dissemination and Coping S - 2014 - Procedia EngjanainaNo ratings yet
- The Application of Image Processing in The Electrical Fire - 2014 - Procedia EngDocument8 pagesThe Application of Image Processing in The Electrical Fire - 2014 - Procedia EngjanainaNo ratings yet
- The Application of Cone Calorimeter On The Study of Burni - 2014 - Procedia EngiDocument5 pagesThe Application of Cone Calorimeter On The Study of Burni - 2014 - Procedia EngijanainaNo ratings yet
- Study On Factors Affecting Evacuation Capability of A Fire - 2014 - Procedia enDocument7 pagesStudy On Factors Affecting Evacuation Capability of A Fire - 2014 - Procedia enjanainaNo ratings yet
- Risk Analyzing On Target Type of Arson Attack: SciencedirectDocument10 pagesRisk Analyzing On Target Type of Arson Attack: SciencedirectjanainaNo ratings yet
- Simulation Research On Interaction Rules Between Superfine - 2014 - Procedia enDocument8 pagesSimulation Research On Interaction Rules Between Superfine - 2014 - Procedia enjanainaNo ratings yet
- Simulation of Evacuation in A Twin Bore Tunnel Analysis o - 2014 - Procedia EngDocument10 pagesSimulation of Evacuation in A Twin Bore Tunnel Analysis o - 2014 - Procedia EngjanainaNo ratings yet
- Structural Stability Analysis of Pneumatic Membrane Archite - 2014 - Procedia enDocument8 pagesStructural Stability Analysis of Pneumatic Membrane Archite - 2014 - Procedia enjanainaNo ratings yet
- Research On Smoke Flow in A Tunnel Fire of Subway Sy - 2014 - Procedia EngineeriDocument7 pagesResearch On Smoke Flow in A Tunnel Fire of Subway Sy - 2014 - Procedia EngineerijanainaNo ratings yet
- Pyrolysis Analysis of Brominated Flame Retarded Polypropylene (PP)Document5 pagesPyrolysis Analysis of Brominated Flame Retarded Polypropylene (PP)janainaNo ratings yet
- Performance Based Smoke Prevention and Extraction System D - 2014 - Procedia EngDocument8 pagesPerformance Based Smoke Prevention and Extraction System D - 2014 - Procedia EngjanainaNo ratings yet
- Research of Occupant Density in The Wholesale and Reta - 2014 - Procedia EngineeDocument6 pagesResearch of Occupant Density in The Wholesale and Reta - 2014 - Procedia EngineejanainaNo ratings yet
- Research On Application of Heavy Compressed Air Foam Truck - 2014 - Procedia EngDocument10 pagesResearch On Application of Heavy Compressed Air Foam Truck - 2014 - Procedia EngjanainaNo ratings yet
- Investigation of An Unsteady Flame Propagating in A Cu - 2014 - Procedia EngineeDocument8 pagesInvestigation of An Unsteady Flame Propagating in A Cu - 2014 - Procedia EngineejanainaNo ratings yet
- Numerical Study On Temperature Distribution of Structural - 2014 - Procedia EngDocument7 pagesNumerical Study On Temperature Distribution of Structural - 2014 - Procedia EngjanainaNo ratings yet
- Path Optimization Study For Vehicles Evacuation Based On - 2014 - Procedia EnginDocument7 pagesPath Optimization Study For Vehicles Evacuation Based On - 2014 - Procedia EnginjanainaNo ratings yet
- Pedestrian Flow Characteristic of Typical Metro Station N - 2014 - Procedia EngiDocument6 pagesPedestrian Flow Characteristic of Typical Metro Station N - 2014 - Procedia EngijanainaNo ratings yet
- Mountain Disaster Incidents and Corresponding Emergency - 2014 - Procedia EngineDocument7 pagesMountain Disaster Incidents and Corresponding Emergency - 2014 - Procedia EnginejanainaNo ratings yet
- Passenger Ship Evacuation Simulation and Validation by E - 2014 - Procedia EnginDocument6 pagesPassenger Ship Evacuation Simulation and Validation by E - 2014 - Procedia EnginjanainaNo ratings yet
- Numerical Simulation Study On Characteristics of Overflowi - 2014 - Procedia EngDocument6 pagesNumerical Simulation Study On Characteristics of Overflowi - 2014 - Procedia EngjanainaNo ratings yet
- Unconventional Emergency System Characteristics and Emerg - 2014 - Procedia EngiDocument8 pagesUnconventional Emergency System Characteristics and Emerg - 2014 - Procedia EngijanainaNo ratings yet
- New Framework of Intelligent Evacuation System of Bui - 2014 - Procedia EngineerDocument6 pagesNew Framework of Intelligent Evacuation System of Bui - 2014 - Procedia EngineerjanainaNo ratings yet
- Method of Bottleneck Identification and Evaluation During - 2014 - Procedia EngiDocument8 pagesMethod of Bottleneck Identification and Evaluation During - 2014 - Procedia EngijanainaNo ratings yet
- Numerical Simulation of Toluene Vapor Diffusion in Lim - 2014 - Procedia EngineeDocument6 pagesNumerical Simulation of Toluene Vapor Diffusion in Lim - 2014 - Procedia EngineejanainaNo ratings yet
- Numerical Simulation of Evacuation in A Subway Station: SciencedirectDocument6 pagesNumerical Simulation of Evacuation in A Subway Station: SciencedirectjanainaNo ratings yet
- Investigation of Fire Protection Status For Nanjing Represen - 2014 - Procedia EDocument8 pagesInvestigation of Fire Protection Status For Nanjing Represen - 2014 - Procedia EjanainaNo ratings yet
- The Introduction of Criteria Parameter in Spontaneous C - 2014 - Procedia EngineDocument8 pagesThe Introduction of Criteria Parameter in Spontaneous C - 2014 - Procedia EnginejanainaNo ratings yet
- Time-Clustering Behaviors of Urban Fires: SciencedirectDocument6 pagesTime-Clustering Behaviors of Urban Fires: SciencedirectjanainaNo ratings yet
- Image System Establishment of Electrical Fire Short Cir - 2014 - Procedia EngineDocument5 pagesImage System Establishment of Electrical Fire Short Cir - 2014 - Procedia EnginejanainaNo ratings yet
- Design and Implementation of Fire Safety Evacuation Simulat - 2014 - Procedia enDocument8 pagesDesign and Implementation of Fire Safety Evacuation Simulat - 2014 - Procedia enjanainaNo ratings yet
- Fire Protection CourseDocument41 pagesFire Protection CourseyoussryNo ratings yet
- GGA-35St and GGA-11St Extinguishing Aerosol Generators: Modern FIREACTION Fire Suppression TechnologyDocument3 pagesGGA-35St and GGA-11St Extinguishing Aerosol Generators: Modern FIREACTION Fire Suppression TechnologyAry TubagusNo ratings yet
- Case Study2 (Fire Safety) OSHADocument18 pagesCase Study2 (Fire Safety) OSHAHazreen HazwanyNo ratings yet
- LP3 Construction Site PremisesDocument43 pagesLP3 Construction Site Premisesglenn salandananNo ratings yet
- DRR Chapter 8Document3 pagesDRR Chapter 8John Lloyd Balares Ogao-OgaoNo ratings yet
- Introduction To NFPA 1700Document41 pagesIntroduction To NFPA 1700Mr. Ahsan Jamal ahsan.jamalNo ratings yet
- Vimal Fire Controls Pvt. LTD.: Corporate Profile 2021Document40 pagesVimal Fire Controls Pvt. LTD.: Corporate Profile 2021ananthkhNo ratings yet
- Imo SymbolDocument248 pagesImo SymbolSantoso WahyudiNo ratings yet
- Ficha Técnica NanovitDocument2 pagesFicha Técnica NanovitOperadora Nano PacificNo ratings yet
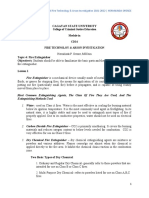
- Cagayan State University: Fire Extinguisher Is A Mechanical Device Usually Made of Metal, Containing ChemicalsDocument2 pagesCagayan State University: Fire Extinguisher Is A Mechanical Device Usually Made of Metal, Containing ChemicalsStephen EstalNo ratings yet
- Fire Risk Assessment For Site Office and SiteDocument11 pagesFire Risk Assessment For Site Office and SiteSajid Shah100% (1)
- E. Patrol ProceduresDocument44 pagesE. Patrol ProceduresIbrahim KashmNo ratings yet
- Fire Symbols A.952 (23) - NewDocument15 pagesFire Symbols A.952 (23) - NewSrikanth ShivramNo ratings yet
- DUW10012 - Jun19 - Week7 - Chapter 5 - Fire SafetyDocument26 pagesDUW10012 - Jun19 - Week7 - Chapter 5 - Fire Safetyfarhan selamatNo ratings yet
- Fire Tech and Arson Inves (Gracev.)Document113 pagesFire Tech and Arson Inves (Gracev.)Jud AurintoNo ratings yet
- Fire and ExplosionDocument10 pagesFire and ExplosionrutvikNo ratings yet
- Fire Extinguishing Training ManualDocument70 pagesFire Extinguishing Training ManualSnow JohnNo ratings yet
- (Pharma-Tech Assignment) : Fire Hazards IN Pharmaceutical IndustryDocument6 pages(Pharma-Tech Assignment) : Fire Hazards IN Pharmaceutical IndustryZulqarnain AslamNo ratings yet
- Fire and Arson Investigation Mid Terms NotesDocument67 pagesFire and Arson Investigation Mid Terms NotesMid AcidNo ratings yet
- Imo Signs: Safety Officer's GuideDocument60 pagesImo Signs: Safety Officer's Guidemarko nežićNo ratings yet
- Q&a (Fire)Document12 pagesQ&a (Fire)Lorraine BautistaNo ratings yet
- Bahamas Maritime Authority Escape Route Signs and Equipment Location Markins 2018 - 11Document15 pagesBahamas Maritime Authority Escape Route Signs and Equipment Location Markins 2018 - 11Elder FrancoNo ratings yet
- Factors of Affecting Chemical Reactions Control Fire Pollution and CorrosionDocument32 pagesFactors of Affecting Chemical Reactions Control Fire Pollution and CorrosionZev LegacyNo ratings yet
- Fire Tech Review NotesDocument12 pagesFire Tech Review NotesJames BugayongNo ratings yet
- D6523-00 (Reapproved 2014) E1Document6 pagesD6523-00 (Reapproved 2014) E1mithileshNo ratings yet
- Transformer Safety Standards PDF FreeDocument65 pagesTransformer Safety Standards PDF FreecptripioNo ratings yet
- Fire Safety & Fire Extinguisher UseDocument16 pagesFire Safety & Fire Extinguisher Usenarayananks1No ratings yet