Download as pdf or txt
You might also like
- Robust and Optimal Control-ZhouDocument603 pagesRobust and Optimal Control-Zhouraptor0096100% (4)
- Computational Aids in Aeroservoelastic Analysis Using MATLABDocument175 pagesComputational Aids in Aeroservoelastic Analysis Using MATLABHamed AzargoshasbNo ratings yet
- Sat-600hp Service Manual1223Document50 pagesSat-600hp Service Manual1223FuadNo ratings yet
- Getinge Autoclave Service Manual Green FilmDocument5 pagesGetinge Autoclave Service Manual Green FilmFuadNo ratings yet
- Dell Optiplex Computers Repair ManualDocument5 pagesDell Optiplex Computers Repair ManualFuadNo ratings yet
- MOSFET Cross-Reference Search - Equivalent TransistorsDocument1 pageMOSFET Cross-Reference Search - Equivalent TransistorsFuadNo ratings yet
- Stanford Linear System TheoryDocument431 pagesStanford Linear System TheoryNurhan Arslan100% (1)
- Signals Systems Lab 2Document5 pagesSignals Systems Lab 2ahmad.a.touseefNo ratings yet
- 45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceDocument84 pages45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceSwifty SpotNo ratings yet
- Control Systems EngineeringDocument32 pagesControl Systems EngineeringSingappuli100% (2)
- Me 363 - GhonlineDocument81 pagesMe 363 - GhonlineEmmanuel AmoakoNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- State SpaceDocument101 pagesState SpaceShivam AroraNo ratings yet
- Signals and Systems: Lecture #2: Introduction To SystemsDocument8 pagesSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNo ratings yet
- Transfer Function: FOR Discrete Lti SystemDocument38 pagesTransfer Function: FOR Discrete Lti SystemKrishn LimbachiyaNo ratings yet
- ELG4152L305Document33 pagesELG4152L305Rahul GalaNo ratings yet
- Modeling and Simulation of Dynamic Systems: Lecture Notes of ME 862Document9 pagesModeling and Simulation of Dynamic Systems: Lecture Notes of ME 862RajrdbNo ratings yet
- Proportional Integrative Derifative ControlDocument41 pagesProportional Integrative Derifative ControlSa Tri YaNo ratings yet
- CSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVDocument3 pagesCSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVNadeem KhanNo ratings yet
- S1.State Variable RepresentationDocument5 pagesS1.State Variable RepresentationrajeshmholmukheNo ratings yet
- Advanced Linear Control Systems: Course ObjectivesDocument16 pagesAdvanced Linear Control Systems: Course Objectivessameerfarooq420840No ratings yet
- Ee263 Course ReaderDocument430 pagesEe263 Course ReadersurvinderpalNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- Module 7: Discrete State Space Models: Lecture Note 1Document4 pagesModule 7: Discrete State Space Models: Lecture Note 1venkat mandaNo ratings yet
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Chapter 1Document8 pagesChapter 1hitesh89No ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Control System IDocument13 pagesControl System Ishiko nemanNo ratings yet
- Chapter 03Document89 pagesChapter 03Şirin AdaNo ratings yet
- Transfer Functions and Block Diagrams PDFDocument21 pagesTransfer Functions and Block Diagrams PDFJuliana NepembeNo ratings yet
- Review PPT Modified KLJLKDocument30 pagesReview PPT Modified KLJLKPranith KumarNo ratings yet
- State Estimation TechniquesDocument52 pagesState Estimation TechniquesGheewala AnkurNo ratings yet
- Advance Control Systems Lab File: Name: Prateek Pandey Enroll. No: 43113204918 Batch: EEE 4 YrDocument26 pagesAdvance Control Systems Lab File: Name: Prateek Pandey Enroll. No: 43113204918 Batch: EEE 4 YrCharanpreet SinghNo ratings yet
- Linear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaDocument49 pagesLinear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaAndré AraújoNo ratings yet
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNo ratings yet
- CH 1Document11 pagesCH 1tarekegn utaNo ratings yet
- Automatic Control ExerciseDocument140 pagesAutomatic Control Exercisetaile1995No ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- SEEA1602Document230 pagesSEEA1602Dilli harshaNo ratings yet
- System Modeling & ExamplesDocument16 pagesSystem Modeling & ExamplesahmdNo ratings yet
- 31 - Lecture-31 - State Space AnalysisDocument17 pages31 - Lecture-31 - State Space AnalysisDeepesh RajpootNo ratings yet
- Inno2018 CE I MET4 ModellingDocument12 pagesInno2018 CE I MET4 ModellinginnoodiraNo ratings yet
- Modeling and Simulation: Raul - Ionel@etc - UptDocument14 pagesModeling and Simulation: Raul - Ionel@etc - UpthassenbbNo ratings yet
- Lec 07Document25 pagesLec 07api-247714257No ratings yet
- Chapter 8 State Space AnalysisDocument22 pagesChapter 8 State Space AnalysisAli AhmadNo ratings yet
- MCLECTURE2Document57 pagesMCLECTURE2teknikpembakaran2013No ratings yet
- EGR214B1 19 16LSp1Document19 pagesEGR214B1 19 16LSp1sultanNo ratings yet
- InTech-Control Designs For Linear Systems Using State Derivative FeedbackDocument29 pagesInTech-Control Designs For Linear Systems Using State Derivative FeedbackManmatha KrishnanNo ratings yet
- EE1354 MODERN CONTROL SYSTEMS - FinalDocument23 pagesEE1354 MODERN CONTROL SYSTEMS - FinalMebreNo ratings yet
- Control System IDocument12 pagesControl System IKhawar RiazNo ratings yet
- Modeling of Dynamic SystemsmesinDocument19 pagesModeling of Dynamic SystemsmesinRifqi Bustanul FaozanNo ratings yet
- Linear Observers Design and Implementation: Verica Radisavljevic-Gajic, Member, IEEEDocument6 pagesLinear Observers Design and Implementation: Verica Radisavljevic-Gajic, Member, IEEEgedeus8072No ratings yet
- Reference Signal Tracking Control of The Tora System: A Case Study of TP Model Transformation Based ControlDocument14 pagesReference Signal Tracking Control of The Tora System: A Case Study of TP Model Transformation Based ControlLuizNo ratings yet
- Modeling in The Time DomainDocument19 pagesModeling in The Time DomainAnonymous 55cH67eIxNo ratings yet
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocument5 pagesENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Electronic Systems: Study Topics in Physics Book 8From EverandElectronic Systems: Study Topics in Physics Book 8Rating: 5 out of 5 stars5/5 (1)
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsFrom EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo ratings yet
- Online Course On Ophthalmic Instruments Maintenance - Part IDocument2 pagesOnline Course On Ophthalmic Instruments Maintenance - Part IFuadNo ratings yet
- Water Utility BillDocument1 pageWater Utility BillFuadNo ratings yet
- Spare PartDocument3 pagesSpare PartFuadNo ratings yet
- 1SDC210107D0201 - Embedded ATSDocument4 pages1SDC210107D0201 - Embedded ATSFuadNo ratings yet
- 1 Statistical Methods For Continuous Variables Corr and RegressionDocument75 pages1 Statistical Methods For Continuous Variables Corr and RegressionFuad100% (1)
- Zones of Protection and General Principles of ProtectionDocument5 pagesZones of Protection and General Principles of ProtectionFuadNo ratings yet
- Service Manual: H.C.P.T. APR'07Document11 pagesService Manual: H.C.P.T. APR'07FuadNo ratings yet
- Chapter 11: Reagent Manufacture: Guidelines For The Blood Transfusion ServicesDocument33 pagesChapter 11: Reagent Manufacture: Guidelines For The Blood Transfusion ServicesFuadNo ratings yet
- ALX Application Founder Transcript.Document2 pagesALX Application Founder Transcript.FuadNo ratings yet
- Postcodes in Ethiopia: Listed in Postcode Order From 1000 To 7260Document5 pagesPostcodes in Ethiopia: Listed in Postcode Order From 1000 To 7260FuadNo ratings yet
- Prepared By: Someone Like John CrixusDocument67 pagesPrepared By: Someone Like John CrixusFuadNo ratings yet
- Hitachi R-Z570ARU7 Service ManualDocument11 pagesHitachi R-Z570ARU7 Service ManualFuadNo ratings yet
- Certificate Course On Instruments Maintenance For TechniciansDocument3 pagesCertificate Course On Instruments Maintenance For TechniciansFuadNo ratings yet
- Infineon-EconoPACK - EconoPIM - Series - ApplicationNotes-v01 - 00-ENDocument27 pagesInfineon-EconoPACK - EconoPIM - Series - ApplicationNotes-v01 - 00-ENFuadNo ratings yet
- Hand Wheel Vertical Autoclave Biobase BKQ-B75IIDocument3 pagesHand Wheel Vertical Autoclave Biobase BKQ-B75IIFuadNo ratings yet
- V23990-P849 - 4 - PM: Flow PIM 0 3Document24 pagesV23990-P849 - 4 - PM: Flow PIM 0 3FuadNo ratings yet
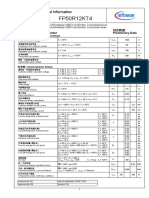
- Fp50R12Kt4: 技术信息/TechnicalinformationDocument11 pagesFp50R12Kt4: 技术信息/TechnicalinformationFuadNo ratings yet
- ABB ATS Brochure V 10-2 LRDocument12 pagesABB ATS Brochure V 10-2 LRFuadNo ratings yet
- Finecare BrochureDocument2 pagesFinecare BrochureFuadNo ratings yet
- GN Series: Product SelectionDocument182 pagesGN Series: Product SelectionFuadNo ratings yet
- 1.pulse Oximeter: General Description: Non-Invasive Measurement of Oxygen Saturation and Pulse Rate WithDocument4 pages1.pulse Oximeter: General Description: Non-Invasive Measurement of Oxygen Saturation and Pulse Rate WithFuadNo ratings yet
- 5Q0765RTDocument10 pages5Q0765RTFuadNo ratings yet
- Silicon PNP Epitaxial: ApplicationDocument5 pagesSilicon PNP Epitaxial: ApplicationFuadNo ratings yet
- The Specifications of K15A60D: Details PDFDocument1 pageThe Specifications of K15A60D: Details PDFFuadNo ratings yet
- Tn0200T/Ts N-Channel 20-V (D-S) Mosfets: Vishay SiliconixDocument5 pagesTn0200T/Ts N-Channel 20-V (D-S) Mosfets: Vishay SiliconixFuadNo ratings yet
- Silicon PNP Power Transistors: Product SpecificationDocument3 pagesSilicon PNP Power Transistors: Product SpecificationFuadNo ratings yet
- Chapter 12Document91 pagesChapter 12Carmen de LeonNo ratings yet
- Solution To The User Equilibrium Dynamic Traffic Routing Problem Using Feedback LinearizationDocument18 pagesSolution To The User Equilibrium Dynamic Traffic Routing Problem Using Feedback LinearizationRamadan DurakuNo ratings yet
- Adaptive Input - Output Linearizing Control of Induction Motors PDFDocument14 pagesAdaptive Input - Output Linearizing Control of Induction Motors PDFJorge LavínNo ratings yet
- ControlDocument135 pagesControlElvin MüseyibovNo ratings yet
- Virtual Prototyping of An Electric Power Steering SimulatorDocument10 pagesVirtual Prototyping of An Electric Power Steering SimulatorBalajiNo ratings yet
- Introduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsDocument47 pagesIntroduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsVinit SutarNo ratings yet
- Advanced Contol Systems Full NotesDocument113 pagesAdvanced Contol Systems Full NotesM.KNo ratings yet
- Adv Control & Robotic Lec 2Document27 pagesAdv Control & Robotic Lec 2key3hseNo ratings yet
- Robot ManipulatorsDocument556 pagesRobot ManipulatorsIvan AvramovNo ratings yet
- Control System Theory and DesignDocument290 pagesControl System Theory and DesignPitzi PitzoneNo ratings yet
- OPTIMAL ControlpapperDocument11 pagesOPTIMAL Controlpapperalfani13No ratings yet
- Ieee76b8073a Ed83 20160227121547 PDFDocument13 pagesIeee76b8073a Ed83 20160227121547 PDFSani1248No ratings yet
- Objectives: Question Bank On Short Answer QuestionsDocument12 pagesObjectives: Question Bank On Short Answer QuestionsTahseen AnjumNo ratings yet
- MainDocument668 pagesMainMoulines VincentNo ratings yet
- 7289237Document265 pages7289237Ravi Kiran MeesalaNo ratings yet
- Práctica Diagramas de BloquesDocument7 pagesPráctica Diagramas de BloquesGuardado EduardoNo ratings yet
- MATLAB FunctionsDocument2 pagesMATLAB FunctionsEtsupNo ratings yet
- Control System Question BankDocument23 pagesControl System Question Bankdr mbaluNo ratings yet
- Implementation of Pacejka's AnalyticalDocument42 pagesImplementation of Pacejka's AnalyticalRenan AlvesNo ratings yet
- Dynare ExamplesDocument21 pagesDynare ExamplesgvenchoNo ratings yet
- Anna University, Chennai Affiliated Institutions Regulations - 2017 Choice Based Credit System M.E. Power Systems EngineeringDocument43 pagesAnna University, Chennai Affiliated Institutions Regulations - 2017 Choice Based Credit System M.E. Power Systems EngineeringKRAJ315No ratings yet
- Week 2 System Modeling RovisDocument51 pagesWeek 2 System Modeling RovisBảo MinhNo ratings yet
- MIT6 01SCS11 Chap07 PDFDocument26 pagesMIT6 01SCS11 Chap07 PDFPranav KarthikeyanNo ratings yet
- 16EC3203 Control Systems EngineeringDocument260 pages16EC3203 Control Systems EngineeringDivyaJ100% (1)
- 2-Mathematical Modeling PDFDocument91 pages2-Mathematical Modeling PDFFahad AliNo ratings yet
- Unit 1, 2 Control - Systems - NotesDocument97 pagesUnit 1, 2 Control - Systems - NoteskingsukumarNo ratings yet
- Control System Design For An Autonomous Mobile RobotDocument86 pagesControl System Design For An Autonomous Mobile RobotEswaran'zSivaNo ratings yet