Download as pdf or txt
You might also like
- Métodos numéricos aplicados a Ingeniería: Casos de estudio usando MATLABFrom EverandMétodos numéricos aplicados a Ingeniería: Casos de estudio usando MATLABRating: 5 out of 5 stars5/5 (1)
- SM CH PDFDocument18 pagesSM CH PDFHector NaranjoNo ratings yet
- Unit 005 Producing Components Using Hand Fitting Techniques: Level: 2 Credit Value: 14 NDAQ Number: 500/9514/6 Unit AimDocument8 pagesUnit 005 Producing Components Using Hand Fitting Techniques: Level: 2 Credit Value: 14 NDAQ Number: 500/9514/6 Unit AimDARTH XZOMBIEzZ0% (1)
- Part One Part One: Mathematical Modeling Mathematical Modeling, Numerical Methods, and Problem SolvingDocument13 pagesPart One Part One: Mathematical Modeling Mathematical Modeling, Numerical Methods, and Problem SolvingyogaNo ratings yet
- NM 1.0 IntroDocument30 pagesNM 1.0 IntroMohd AshrafNo ratings yet
- Week1 Chapter 1-3 IntroductionDocument56 pagesWeek1 Chapter 1-3 IntroductionIVAN CHRISTIANNo ratings yet
- Mathematical Modeling, Numerical Methods, and Problem SolvingDocument96 pagesMathematical Modeling, Numerical Methods, and Problem SolvingAbel TayeNo ratings yet
- L1 Numerical Methods-AnalysisDocument16 pagesL1 Numerical Methods-AnalysisEdenNo ratings yet
- Numerical Methods Chapter 1 3 4Document44 pagesNumerical Methods Chapter 1 3 4dsnNo ratings yet
- 00A - Introduksi Komp Num 01Document25 pages00A - Introduksi Komp Num 01Mess YeahNo ratings yet
- NM Intro 1Document27 pagesNM Intro 1Nurul AsyilahNo ratings yet
- 01 CS316 IntroductionDocument45 pages01 CS316 IntroductionAbdelrhman SowilamNo ratings yet
- Lecture 0Document40 pagesLecture 0Nikhil VijNo ratings yet
- Introduction To DaaDocument126 pagesIntroduction To DaaMalajebamaniraj MalaNo ratings yet
- Chemical Engineering Mathematics: Ali AltwayDocument164 pagesChemical Engineering Mathematics: Ali AltwayDyan Sulys TyaningsihNo ratings yet
- Numerical Methods: Intro To Numerical Methods & Intro To Matlab ProgrammingDocument45 pagesNumerical Methods: Intro To Numerical Methods & Intro To Matlab ProgrammingMd Jahirul Islam100% (1)
- Chapter 1 PDFDocument42 pagesChapter 1 PDFbig boy smkakNo ratings yet
- Teknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DDocument44 pagesTeknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DblackzenyNo ratings yet
- CFD IntroductionDocument10 pagesCFD IntroductionChitrarthLavNo ratings yet
- Chap 9 Algorithms IntroductionDocument22 pagesChap 9 Algorithms IntroductionAnh ViệtNo ratings yet
- Chapter 1Document16 pagesChapter 1Abel TayeNo ratings yet
- Modeling and Simulation: ME 635/IPD 611 Kishore PochirajuDocument48 pagesModeling and Simulation: ME 635/IPD 611 Kishore PochirajuFredNo ratings yet
- System SimulationDocument60 pagesSystem SimulationShubhadaNo ratings yet
- Numerical Methods and Problem Solving: Chapter ObjectivesDocument33 pagesNumerical Methods and Problem Solving: Chapter ObjectivesAgricultural MachineryNo ratings yet
- Numerical Methods: By: Jeziel C. Suniel, EceDocument48 pagesNumerical Methods: By: Jeziel C. Suniel, EceJeziel SunielNo ratings yet
- Materi 1 Matematika TerapanDocument39 pagesMateri 1 Matematika TerapanDewiNo ratings yet
- MATH2059 - Ozge KK-Chapter1Document34 pagesMATH2059 - Ozge KK-Chapter1demir ermanNo ratings yet
- Introduction To Numerical MethodDocument45 pagesIntroduction To Numerical MethodTirah KrolNo ratings yet
- ADA Unit IDocument114 pagesADA Unit IAjal ShresthaNo ratings yet
- Subject Name: Design and Analysis of Algorithms Subject Code: 10CS43 Prepared By: Sindhuja K Department: CSE DateDocument59 pagesSubject Name: Design and Analysis of Algorithms Subject Code: 10CS43 Prepared By: Sindhuja K Department: CSE DateTawseef ShaikhNo ratings yet
- Mathematical ModelingDocument27 pagesMathematical ModelingGopu MohandasNo ratings yet
- 02EAH 225 - Dec28th PDFDocument25 pages02EAH 225 - Dec28th PDFTesh SiNo ratings yet
- Running A Proper Regression Analysis: V G R Chandran Govindaraju Uitm Email: WebsiteDocument36 pagesRunning A Proper Regression Analysis: V G R Chandran Govindaraju Uitm Email: WebsiteArafatul Alam PatwaryNo ratings yet
- Lecture 3Document7 pagesLecture 3derfdNo ratings yet
- CFD Class M.techDocument52 pagesCFD Class M.techdankshavali shaikNo ratings yet
- Cssyll 3Document21 pagesCssyll 3Mohan H G SantyNo ratings yet
- Lecture 1Document22 pagesLecture 1Roshan CharaghNo ratings yet
- Introduction To Computational HydraulicsDocument33 pagesIntroduction To Computational HydraulicsDatz SorianoNo ratings yet
- Regression Analysis Engineering StatisticsDocument72 pagesRegression Analysis Engineering StatisticsLeonardo Miguel LantoNo ratings yet
- Lags and Lag StructureDocument27 pagesLags and Lag StructureDina Bunbun AiiahNo ratings yet
- Lecture1 - Modelling-Computers-Error Analysis - 19feb2024 - NK - v1Document75 pagesLecture1 - Modelling-Computers-Error Analysis - 19feb2024 - NK - v1yamanfNo ratings yet
- Mathematical Problem SolvingDocument28 pagesMathematical Problem SolvingGopu MohandasNo ratings yet
- FEM FundamentalsDocument62 pagesFEM FundamentalsleleparthaNo ratings yet
- Lecture 1.0Document29 pagesLecture 1.0Shaheen S. RatnaniNo ratings yet
- Wk01 - Lec01 Physical QuantitiesDocument23 pagesWk01 - Lec01 Physical QuantitiesYouCan SpamNo ratings yet
- Lecture 1: Overview of The CFD Process and Workflow: ANSYS Fluent Getting Started - Part 1Document15 pagesLecture 1: Overview of The CFD Process and Workflow: ANSYS Fluent Getting Started - Part 1ReytingNo ratings yet
- CH 01Document25 pagesCH 01Anwar AlthariNo ratings yet
- 09.0 Integer Programming PDFDocument77 pages09.0 Integer Programming PDFAshoka VanjareNo ratings yet
- Dimension AnalysisDocument63 pagesDimension AnalysisJonny SinclairNo ratings yet
- Lecture 1.1: Overview of The CFD Process and Workflow: ANSYS Fluent Getting StartedDocument16 pagesLecture 1.1: Overview of The CFD Process and Workflow: ANSYS Fluent Getting StartedSahil JawaNo ratings yet
- Discretization of EquationDocument14 pagesDiscretization of Equationsandyengineer13No ratings yet
- Chapter-2-Data Structures and Algorithms AnalysisDocument44 pagesChapter-2-Data Structures and Algorithms Analysisbini100% (1)
- คณิต54 - Numerical MethodsDocument4 pagesคณิต54 - Numerical MethodsNutnut NutnutNo ratings yet
- ESE306-lecture 1Document34 pagesESE306-lecture 1masamba10No ratings yet
- 6192d8da 1630643399377Document40 pages6192d8da 1630643399377Badal PanditNo ratings yet
- Ch1. Mathematical Modeling, Numerical Methods, and Problem SolvingDocument11 pagesCh1. Mathematical Modeling, Numerical Methods, and Problem Solvingmsalam2No ratings yet
- Process OptimizationDocument70 pagesProcess OptimizationplanketNo ratings yet
- Algo Lecture01Document66 pagesAlgo Lecture01Noor FatimaNo ratings yet
- FM Ch4 Lecture AASTU.Document81 pagesFM Ch4 Lecture AASTU.Abenezer KassahunNo ratings yet
- Chapter 8 Indicator Variable: Ray-Bing Chen Institute of Statistics National University of KaohsiungDocument40 pagesChapter 8 Indicator Variable: Ray-Bing Chen Institute of Statistics National University of KaohsiungRagini ChaurasiaNo ratings yet
- Lecture1 6 PDFDocument30 pagesLecture1 6 PDFColinNo ratings yet
- MSE 354 - Lesson 03Document48 pagesMSE 354 - Lesson 03Sarah AkuteyNo ratings yet
- Lab 4 - Heat Treatment of Steels - Quenching & TemperingDocument14 pagesLab 4 - Heat Treatment of Steels - Quenching & TemperingSarah AkuteyNo ratings yet
- Welding Processes: Prof. Kannatey-Asibu, JRDocument44 pagesWelding Processes: Prof. Kannatey-Asibu, JRSarah AkuteyNo ratings yet
- Eng Prop of Polymers Lecture 1Document134 pagesEng Prop of Polymers Lecture 1Sarah AkuteyNo ratings yet
- Control1088un 2020-01 PDFDocument104 pagesControl1088un 2020-01 PDFhareshNo ratings yet
- 2023 - ECON422 - TURKISH ECONOMY - HOMEWORK - Final VersionDocument3 pages2023 - ECON422 - TURKISH ECONOMY - HOMEWORK - Final VersionsenaNo ratings yet
- U Pravom Testu Nema Ponudjenih Reci (BEEN, YOU ) Vec Mozete Upotrebiti Bilo Koje, Ali Recenica Treba Da Ima Smisla I Da Ne Promeni ZnacenjeDocument3 pagesU Pravom Testu Nema Ponudjenih Reci (BEEN, YOU ) Vec Mozete Upotrebiti Bilo Koje, Ali Recenica Treba Da Ima Smisla I Da Ne Promeni ZnacenjeMarko RisticNo ratings yet
- Ict FinalDocument23 pagesIct FinalJhody MaeNo ratings yet
- Stirling's FormulaDocument3 pagesStirling's FormulaAnnisa ZakiyaNo ratings yet
- Chapter 7 - Cognitive DevelopmentDocument3 pagesChapter 7 - Cognitive DevelopmentmizbigspendaNo ratings yet
- D202466-18 UJF-3042HG, 6042 OperationManual eDocument160 pagesD202466-18 UJF-3042HG, 6042 OperationManual eAzure FistNo ratings yet
- Math InterventionDocument6 pagesMath InterventionPAOLO R. ALARDENo ratings yet
- A289A289M-97 (2013) Standard Specification For Alloy Steel Forgings For Nonmagnetic Retaining Rings For GeneratorsDocument3 pagesA289A289M-97 (2013) Standard Specification For Alloy Steel Forgings For Nonmagnetic Retaining Rings For GeneratorsShico1983No ratings yet
- 1LOC005 - How Do I Allocate Legs To A Drivers Run SheetDocument2 pages1LOC005 - How Do I Allocate Legs To A Drivers Run Sheetguolidong2017No ratings yet
- Memory Addressing and Instruction FormatsDocument9 pagesMemory Addressing and Instruction Formatsrobern ndoloNo ratings yet
- LA SpecificationDocument3 pagesLA SpecificationVino VinoNo ratings yet
- System Path VariablesDocument5 pagesSystem Path VariablesUnessNo ratings yet
- Chap 1-5 NotesDocument14 pagesChap 1-5 NotesBismah SaleemNo ratings yet
- Apply For Car Loan in Canada From Canadian Auto CenterDocument1 pageApply For Car Loan in Canada From Canadian Auto CenterCanadian Auto CenterNo ratings yet
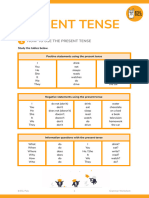
- (TV) Present TenseDocument8 pages(TV) Present TenseDe Aparicio DenisseNo ratings yet
- Online Marketing EssentialsDocument508 pagesOnline Marketing EssentialsElena BotezatuNo ratings yet
- Job Interview Questions OkDocument2 pagesJob Interview Questions OkJaqueline FernándezNo ratings yet
- Test Bank For Learning and Behavior Active Learning 6th Edition by ChanceDocument24 pagesTest Bank For Learning and Behavior Active Learning 6th Edition by ChanceTonyRamosriqzf100% (31)
- Practical Manual in Biochemistry and Clinical BiochemistryDocument6 pagesPractical Manual in Biochemistry and Clinical BiochemistrycxjvxsogzbNo ratings yet
- Modified Dry Direct Seeding TechnologyDocument2 pagesModified Dry Direct Seeding TechnologydelacruzjobyNo ratings yet
- 14-54 8m-Inetermediate-3Document10 pages14-54 8m-Inetermediate-3epdsan3dNo ratings yet
- Three Lever ClassesDocument5 pagesThree Lever ClassesSourabh SharafNo ratings yet
- Dressmaking 9 - Q2 - Module-2Document21 pagesDressmaking 9 - Q2 - Module-2Judith Bernadez-EspenidoNo ratings yet
- RFP Development of Central Green Park in Gift City09092021011413Document151 pagesRFP Development of Central Green Park in Gift City09092021011413akashNo ratings yet
- Prerequisite For Service Entry Sheet SAP-FioriApp.Document4 pagesPrerequisite For Service Entry Sheet SAP-FioriApp.praveennbsNo ratings yet
- 5th-Sunday-of-Lent (2) .2Document1 page5th-Sunday-of-Lent (2) .2Emmanuel ToretaNo ratings yet
- Assignment 3Document3 pagesAssignment 3Joy GhoshNo ratings yet