Download as pdf or txt
You might also like
- L 05 Analysis and Design of Two Way Slab Without BeamsDocument57 pagesL 05 Analysis and Design of Two Way Slab Without BeamsHidayat Ullah100% (2)
- Unit 4 NotesDocument26 pagesUnit 4 NotesJohnsi JNo ratings yet
- Analog-to-Digital and Digital-to-Analog ConversionsDocument20 pagesAnalog-to-Digital and Digital-to-Analog ConversionsArif HassanNo ratings yet
- Unit-3 ADCDocument54 pagesUnit-3 ADCPrassun PrasadNo ratings yet
- Digital To Analog ConvertersDocument9 pagesDigital To Analog ConvertersAlisha KshetriNo ratings yet
- Digital Electronics-10 PDFDocument8 pagesDigital Electronics-10 PDFTapas BanerjeeNo ratings yet
- integratedelectronicsUNIT 3convertersDocument11 pagesintegratedelectronicsUNIT 3convertersYogeshwaranNo ratings yet
- Week 3Document25 pagesWeek 3İBRAHİM YÜMLÜNo ratings yet
- Unit-5 ADCDocument8 pagesUnit-5 ADCDr. M Kiran KumarNo ratings yet
- Experinment 10Document5 pagesExperinment 10mano17doremonNo ratings yet
- BI Technologies R2R Resistor Ladder NetworksDocument6 pagesBI Technologies R2R Resistor Ladder NetworksChethan JayasimhaNo ratings yet
- DAC and ADCDocument18 pagesDAC and ADCHalesh M R ECNo ratings yet
- Analog-To-Digital and Digital-To-Analog Converters - Electronics PostDocument6 pagesAnalog-To-Digital and Digital-To-Analog Converters - Electronics PostDurga DeviNo ratings yet
- Analog To Digital Converter and Vise VersDocument7 pagesAnalog To Digital Converter and Vise VersSpyx MeniNo ratings yet
- Nyquist-Rate D/A ConvertersDocument3 pagesNyquist-Rate D/A ConvertersAli AhmadNo ratings yet
- Lab Manual DAC-SignedDocument10 pagesLab Manual DAC-Signedabidrk_21789100% (2)
- Unit-III Adc & DacDocument20 pagesUnit-III Adc & DacK Krishna Murthy 184450No ratings yet
- DLC Lab - 10Document7 pagesDLC Lab - 10Didarul Alam AlifNo ratings yet
- Analog To Digital Conversion CircuitsDocument10 pagesAnalog To Digital Conversion Circuitsaslam janNo ratings yet
- Digital To Analog ConvertersDocument13 pagesDigital To Analog ConvertersPasha ChauhanNo ratings yet
- Analog To Digital (ADC) and Digital To Analog (DAC) ConvertersDocument12 pagesAnalog To Digital (ADC) and Digital To Analog (DAC) ConvertersIoana IoanaNo ratings yet
- Lab 09 DacDocument8 pagesLab 09 DacSenthil KumarNo ratings yet
- Adc ConversionDocument20 pagesAdc Conversionhemantec100% (1)
- Adc and Dac Converters: BY:-PULKIT PARASHAR (17BEE080), Pritam Yaduvanshi (17bee079) Guide:-Prof. Akhilesh NimjeDocument9 pagesAdc and Dac Converters: BY:-PULKIT PARASHAR (17BEE080), Pritam Yaduvanshi (17bee079) Guide:-Prof. Akhilesh NimjePritam YaduvanshiNo ratings yet
- Using The CURRENT DIFFERENCE AMPLIFIE1-1Document13 pagesUsing The CURRENT DIFFERENCE AMPLIFIE1-1GomitahNo ratings yet
- Using The Current Difference Amplifier (Ingles)Document13 pagesUsing The Current Difference Amplifier (Ingles)GomitahNo ratings yet
- 6 Log Anti Log AmplifiersDocument32 pages6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- Mechatronics 06 2023Document32 pagesMechatronics 06 2023Deniz DemirNo ratings yet
- DEC LAB 06 (Design of A Digital To Analog Converter)Document9 pagesDEC LAB 06 (Design of A Digital To Analog Converter)anon_776365175No ratings yet
- RP Jain Adc DacDocument27 pagesRP Jain Adc DacAnand SinghNo ratings yet
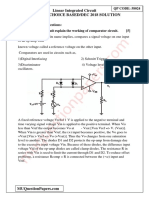
- Lic Dec 2018 Ans PDFDocument24 pagesLic Dec 2018 Ans PDFVaibhavNo ratings yet
- Data Conversion DevicesDocument6 pagesData Conversion Devicesriya vermaNo ratings yet
- Dac and Adc Circuits: Topic OutcomeDocument9 pagesDac and Adc Circuits: Topic OutcomeSegfred NavarroNo ratings yet
- A/D & D/A ConvertersDocument16 pagesA/D & D/A Convertersgeet_battaNo ratings yet
- Analog-To-Digital Conversion Btech IIIDocument50 pagesAnalog-To-Digital Conversion Btech IIILisa BhagatNo ratings yet
- Section F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationDocument8 pagesSection F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationKiệt NgôNo ratings yet
- Implementationofan 8 Bit Successive Subtraction ADCDocument7 pagesImplementationofan 8 Bit Successive Subtraction ADCVhann_FraidNo ratings yet
- Digital-to-Analog (D/A) Converters Lec8 1 Introduction To D/A ConvertersDocument4 pagesDigital-to-Analog (D/A) Converters Lec8 1 Introduction To D/A ConvertersKhalifa EltayebNo ratings yet
- Measuring InstrDocument4 pagesMeasuring InstrG ParidaNo ratings yet
- DACDocument28 pagesDACRohith Mohan100% (1)
- AN-580 Application Note: Programmable Oscillator Uses Digital PotentiometersDocument2 pagesAN-580 Application Note: Programmable Oscillator Uses Digital PotentiometerswolfienukeNo ratings yet
- Converter & Timing CircuitDocument16 pagesConverter & Timing Circuityoboiiii649No ratings yet
- Chapter 5Document42 pagesChapter 5Ram Bahadur KhadkaNo ratings yet
- ECE3073 P7 Analogue AnswersDocument5 pagesECE3073 P7 Analogue AnswerskewancamNo ratings yet
- Analog To Digital & Digital To Analog ConvertersDocument66 pagesAnalog To Digital & Digital To Analog ConvertersSai Krishna Kodali100% (1)
- DC-DC Converters 2014-2015Document20 pagesDC-DC Converters 2014-2015MD. ASHIQUR RAHMAN 1602111No ratings yet
- BIT102 SLM Library - SLM - Unit 12Document15 pagesBIT102 SLM Library - SLM - Unit 12pavanmay227597No ratings yet
- Unit-Viii - Dac and AdcsDocument11 pagesUnit-Viii - Dac and AdcsVarsha SenthilNo ratings yet
- DAC AnalysisDocument19 pagesDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుNo ratings yet
- Signal ProcessingDocument47 pagesSignal ProcessingAthira rcNo ratings yet
- Methods of Analog To Digital ConvertionsDocument11 pagesMethods of Analog To Digital ConvertionsProsper RighendaNo ratings yet
- BScPhysics 4sem MrrajeshKumarDocument20 pagesBScPhysics 4sem MrrajeshKumarchaudhuriabhinaba1No ratings yet
- Digital Energy MeterDocument14 pagesDigital Energy MeterpvpriyaNo ratings yet
- Chapter 4Document23 pagesChapter 4Tejan Kumar SharmaNo ratings yet
- A 15-b - Msample/s Digitally Self-Calibrated Pipeline ADC: Hae-Seung Lee, andDocument9 pagesA 15-b - Msample/s Digitally Self-Calibrated Pipeline ADC: Hae-Seung Lee, andSilpa VelagaletiNo ratings yet
- RCA-MOS-FET-Biasing-1970Document8 pagesRCA-MOS-FET-Biasing-1970ulisses.farinaNo ratings yet
- Binary Weighted DACDocument16 pagesBinary Weighted DACatharvamande2003No ratings yet
- Multi Metro An 202Document6 pagesMulti Metro An 202herberthfabricioNo ratings yet
- ColocviuDocument6 pagesColocviuAndra BordeaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CamScanner 05-31-2021 12.13.57Document34 pagesCamScanner 05-31-2021 12.13.57Son SonNo ratings yet
- ECE202 Analog Communication Unit - 3 FM Transmitters: Dr. A. RajeshDocument17 pagesECE202 Analog Communication Unit - 3 FM Transmitters: Dr. A. RajeshSon SonNo ratings yet
- ECE202 Analog Communication Unit - 3 Transmitters and ReceiversDocument23 pagesECE202 Analog Communication Unit - 3 Transmitters and ReceiversSon SonNo ratings yet
- LIC Notes HandwrittenDocument151 pagesLIC Notes HandwrittenSon SonNo ratings yet
- Sense OrgansDocument6 pagesSense Organsannmarie100% (1)
- Transcript PDFDocument1 pageTranscript PDFapi-486098227No ratings yet
- FL Response Crpe PDFDocument10 pagesFL Response Crpe PDFNational Education Policy CenterNo ratings yet
- Modeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersDocument7 pagesModeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersLucas BomfimNo ratings yet
- Limit State Design Approach For The Safety Evaluation of The Foundations of Concrete Gravity DamsDocument18 pagesLimit State Design Approach For The Safety Evaluation of The Foundations of Concrete Gravity Damsसूरज कुमार चौधरीNo ratings yet
- CP JD 2003 CHT3500 Harverster Supplement World - CB21458306Document51 pagesCP JD 2003 CHT3500 Harverster Supplement World - CB21458306Jaime IglesiasNo ratings yet
- 7080 AccuSizer BrochureDocument8 pages7080 AccuSizer BrochureI SunnahNo ratings yet
- LMA-Workshop-Sheet LABAN PDFDocument6 pagesLMA-Workshop-Sheet LABAN PDFsabinalazarNo ratings yet
- Mottram Escápula1Document6 pagesMottram Escápula1Elizabeth VivancoNo ratings yet
- Tool ManagementDocument6 pagesTool ManagementRoshan RamnaniNo ratings yet
- RDBMS and Table RelationshipsDocument28 pagesRDBMS and Table RelationshipsForkensteinNo ratings yet
- Karnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDocument18 pagesKarnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDexter DoteNo ratings yet
- H3D Manual - Complete ABDZP0GADocument63 pagesH3D Manual - Complete ABDZP0GAMiladShahabiNo ratings yet
- Not Recommended For New Design: Parallel Port Button HolderDocument2 pagesNot Recommended For New Design: Parallel Port Button HolderSaasiNo ratings yet
- TADANO Gr300ex3Document157 pagesTADANO Gr300ex3Abi Jith100% (1)
- Distribution of Experiments (RU-23)Document2 pagesDistribution of Experiments (RU-23)alifarafatbiplobyNo ratings yet
- CH 21 Hull Fundamentals 8 The DDocument23 pagesCH 21 Hull Fundamentals 8 The DjlosamNo ratings yet
- Acción de La Estructura. Miller.Document12 pagesAcción de La Estructura. Miller.Pedro SosaNo ratings yet
- Practical 7 PDFDocument8 pagesPractical 7 PDFAjinkya PatilNo ratings yet
- Introduction To Internal Combustion Engines: Asst. Prof. Vishnu SankarDocument57 pagesIntroduction To Internal Combustion Engines: Asst. Prof. Vishnu SankarMohammad Ishfaq BhatNo ratings yet
- Data Structure Using C NCS301 PDFDocument2 pagesData Structure Using C NCS301 PDFavinas_3marNo ratings yet
- .Labitec.: Platelet Aggregation & Coagulation SystemsDocument4 pages.Labitec.: Platelet Aggregation & Coagulation SystemsBivaria GrupNo ratings yet
- Mash MellowDocument3 pagesMash MellowNicole MeraNo ratings yet
- NATO Vector GraphicsDocument16 pagesNATO Vector GraphicsMarius Lucian NeculaNo ratings yet
- Report 2 Water Absorption of BlockDocument8 pagesReport 2 Water Absorption of BlockZhiwar oramariNo ratings yet
- Scentroid SS400-Operation Manual-V2.0Document21 pagesScentroid SS400-Operation Manual-V2.0delboni delboniNo ratings yet
- NotesDocument289 pagesNoteshemanth beharaNo ratings yet
- Electronics Engineering Mastery Test 7 ECE Pre-Board PDFDocument29 pagesElectronics Engineering Mastery Test 7 ECE Pre-Board PDFXyNo ratings yet
- CT AbdomenDocument2 pagesCT AbdomenVlog Anak DusunNo ratings yet