Download as pdf or txt
You might also like
- Exercise 1: ECE 413 - Digital Signal Processing Home Assignment 1 SolutionsDocument8 pagesExercise 1: ECE 413 - Digital Signal Processing Home Assignment 1 SolutionsA NNo ratings yet
- EE322M Quiz-1 SolutionDocument6 pagesEE322M Quiz-1 SolutionshubhamNo ratings yet
- EDI ProblemDocument5 pagesEDI ProblemluciaNo ratings yet
- Z TableDocument2 pagesZ TablembienkNo ratings yet
- Test 3 SolDocument7 pagesTest 3 Sol林鈺添No ratings yet
- Clase31 Señales.28septiembreDocument2 pagesClase31 Señales.28septiembrekaren juliana rodriguez guerraNo ratings yet
- Notes23 PDFDocument3 pagesNotes23 PDFVikas YadavNo ratings yet
- SS202B 2015midterm SolDocument7 pagesSS202B 2015midterm Sol박천우No ratings yet
- Rison Siregar (1615031060) + 1 3 Z +, Tentukan Nilai X (N) !: Z +2 Z Z Z X e X (Z) Z +2 Z Z Z Z eDocument3 pagesRison Siregar (1615031060) + 1 3 Z +, Tentukan Nilai X (N) !: Z +2 Z Z Z X e X (Z) Z +2 Z Z Z Z eRison SiregarNo ratings yet
- Hw3 SolutionsDocument17 pagesHw3 SolutionsSneha AdhikariNo ratings yet
- The Inverse Z-Transform Is Given AsDocument27 pagesThe Inverse Z-Transform Is Given Asanil kadleNo ratings yet
- Semana 13Document9 pagesSemana 13HAYBI MICAELA GUILLEN DELGADONo ratings yet
- ZT4 Appl OnlinePPTDocument20 pagesZT4 Appl OnlinePPTThato Will MongaleNo ratings yet
- Z Transform From DSP Raja RajeswariDocument23 pagesZ Transform From DSP Raja RajeswariHemanthnag BNo ratings yet
- EE330 Digital Signal Processing: Review of Z-TransformDocument36 pagesEE330 Digital Signal Processing: Review of Z-TransformNihal AhmadNo ratings yet
- A. B. C. Ans.:: Module 3: Analytical Tools Tutorials (Note: Show All Workings and Explanations Clearly)Document4 pagesA. B. C. Ans.:: Module 3: Analytical Tools Tutorials (Note: Show All Workings and Explanations Clearly)Uchechi Chioma UgoNo ratings yet
- P20 IIR Filters Part3Document33 pagesP20 IIR Filters Part3Harold GealanNo ratings yet
- Dwight SolnsDocument18 pagesDwight SolnsGarcia AlexNo ratings yet
- Solutions for Math 311 Final: i (π/3+i) −i (π/3+i)Document10 pagesSolutions for Math 311 Final: i (π/3+i) −i (π/3+i)afryantika pratiwiNo ratings yet
- Module 4 - ExamplesDocument18 pagesModule 4 - ExamplesUchechi Chioma UgoNo ratings yet
- ZT 2024Document74 pagesZT 2024joshuaNo ratings yet
- Table of Indefinite IntegralsDocument2 pagesTable of Indefinite Integrals黃業竣No ratings yet
- 1 Gamma Function & Digamma Function 1.1 Gamma FunctionDocument15 pages1 Gamma Function & Digamma Function 1.1 Gamma FunctionAndrés OchoaNo ratings yet
- Math PDFDocument61 pagesMath PDFMarvin Jay BayodNo ratings yet
- Chapter 4 2 HandoutsDocument68 pagesChapter 4 2 Handoutsmeseret sisayNo ratings yet
- Exercise Signal Processing 1Document35 pagesExercise Signal Processing 1Max PieriniNo ratings yet
- Triple Int16 7Document9 pagesTriple Int16 7Nick CeccioNo ratings yet
- Reduction FormulasDocument1 pageReduction FormulasGodstimeNo ratings yet
- Mat 203 PDFDocument1 pageMat 203 PDFRas DannyNo ratings yet
- Digital Signal Processing: Z TransformDocument39 pagesDigital Signal Processing: Z TransformAbdul HadiNo ratings yet
- Solu of Assignment 9Document5 pagesSolu of Assignment 9dontstopmeNo ratings yet
- Conditional Distributions and Transformations: Homework 9Document6 pagesConditional Distributions and Transformations: Homework 9Zihan ZhuNo ratings yet
- 104 Spring 06 AnswDocument5 pages104 Spring 06 AnswJanry GarciaNo ratings yet
- Solu of Assignment 10Document5 pagesSolu of Assignment 10dontstopmeNo ratings yet
- 1462531595E textofChap4Module4Document9 pages1462531595E textofChap4Module4Affan EffendiNo ratings yet
- Cepstrum Analysis and Homomorphic Deconvolution:) (N) (Z) ( Z) (N ) (Log) (Document19 pagesCepstrum Analysis and Homomorphic Deconvolution:) (N) (Z) ( Z) (N ) (Log) (Mohamed Hasan MutarNo ratings yet
- Where, Is A Complex Exponential Magnitude & Angle: X (Z) X N ZDocument26 pagesWhere, Is A Complex Exponential Magnitude & Angle: X (Z) X N Zanil kadleNo ratings yet
- In-Class Example (4) For Laurent Series: Math 128, Fall 2013 Instructor: Dr. Doreen de LeonDocument2 pagesIn-Class Example (4) For Laurent Series: Math 128, Fall 2013 Instructor: Dr. Doreen de LeonmauropenagosNo ratings yet
- 18 Improper IntegralsDocument6 pages18 Improper Integralsk56jn7xzwxNo ratings yet
- Z Transform - DPP 03 (Of Lec 07)Document4 pagesZ Transform - DPP 03 (Of Lec 07)amitprajapatieceNo ratings yet
- Solutions Ch10Document13 pagesSolutions Ch10mustafa arkanNo ratings yet
- L4 1 LTIsys AnalysisDocument11 pagesL4 1 LTIsys AnalysisMohd Shadab AlamNo ratings yet
- Digital Signal Processing UWO Lecture+8,+February+1stDocument24 pagesDigital Signal Processing UWO Lecture+8,+February+1stGASR2017No ratings yet
- 6 Line Integrals NotesDocument7 pages6 Line Integrals NotesSafdar AbbasNo ratings yet
- CSE - 610 Lecture # 6Document34 pagesCSE - 610 Lecture # 6zaidNo ratings yet
- Institute of Electrical and Electronic EngineeringDocument48 pagesInstitute of Electrical and Electronic EngineeringКдйікі КциNo ratings yet
- 1 1 0.5z 1 1 0.3z 1 1 0.7z 1 (1 0.5z) (1 0.3z) 1 (1 0.5z) (1 0.7z) 1 1 0.5z 1 1 0.3z 1 1 0.7zDocument4 pages1 1 0.5z 1 1 0.3z 1 1 0.7z 1 (1 0.5z) (1 0.3z) 1 (1 0.5z) (1 0.7z) 1 1 0.5z 1 1 0.3z 1 1 0.7zDio Izqhaq Risky SasongkoNo ratings yet
- Exercises 4 With SolutionsDocument6 pagesExercises 4 With Solutionsquanmh16082003No ratings yet
- Lecture10 ZTransFormDocument19 pagesLecture10 ZTransFormAlwin Neil A. CasañadaNo ratings yet
- Bessel Function: Ryusuke Numata The University of Maryland September 3, 2008Document7 pagesBessel Function: Ryusuke Numata The University of Maryland September 3, 2008Mohd AzuanNo ratings yet
- Exam With SolutionsDocument4 pagesExam With SolutionsKayan SamiNo ratings yet
- Lec 8Document59 pagesLec 8Saif AlabdullahNo ratings yet
- Ch3-DSP ZDocument90 pagesCh3-DSP ZtrucquynhtudoanNo ratings yet
- The Z-Transform and Its Roc Properties: - ObjectivesDocument11 pagesThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwNo ratings yet
- Lec7 10Document43 pagesLec7 10ekmemonNo ratings yet
- Z Transform: Z Transform and Its Application To The Analysis of LTI SystemsDocument12 pagesZ Transform: Z Transform and Its Application To The Analysis of LTI SystemsJaume TornilaNo ratings yet
- Z Transform SummaryDocument3 pagesZ Transform SummaryJesse SekenNo ratings yet
- Z Transform SummaryDocument3 pagesZ Transform SummaryJesse SekenNo ratings yet
- Advance Numerical Mechanical SimulationDocument259 pagesAdvance Numerical Mechanical SimulationSankit SinghNo ratings yet
- RPH Year 1 Transition Week 9Document4 pagesRPH Year 1 Transition Week 9Norlizza IsmailNo ratings yet
- The Nature of Probability and StatisticsDocument16 pagesThe Nature of Probability and StatisticsCynthia Plaza100% (1)
- User Manual To Mitsubishi Projection TV WS-65315Document76 pagesUser Manual To Mitsubishi Projection TV WS-65315notesdrNo ratings yet
- 14122-1 - Choice of Fixed Means of Access Between Two LevelsDocument20 pages14122-1 - Choice of Fixed Means of Access Between Two Levelsdavid.gonda8No ratings yet
- Algorithm and Validation of Tower of HanoiDocument2 pagesAlgorithm and Validation of Tower of HanoiKyaan MosqNo ratings yet
- Fitosoil Lab Test On VADocument2 pagesFitosoil Lab Test On VAkoko manjitNo ratings yet
- Decision AnalysisDocument28 pagesDecision AnalysisAshley MorrisNo ratings yet
- HC700 SDK SpecificationDocument680 pagesHC700 SDK SpecificationTzahiKupfer0% (1)
- The Modeling and Simulation of A Solenoid Valve For Industrial ApplicationsDocument4 pagesThe Modeling and Simulation of A Solenoid Valve For Industrial ApplicationsKamal UpadhyayNo ratings yet
- Casing Centralizer Are We Using Too Many or Too FewDocument19 pagesCasing Centralizer Are We Using Too Many or Too FewbeiguiiuirrNo ratings yet
- Maharshi Aravabhoomi ResumeDocument2 pagesMaharshi Aravabhoomi Resumedvinodkumarreddy2No ratings yet
- Backup & Restore: Samsung Galaxy Note 3: Back Up AppsDocument6 pagesBackup & Restore: Samsung Galaxy Note 3: Back Up Appsfreekey2No ratings yet
- As 91585 Probability Schedule 2014Document5 pagesAs 91585 Probability Schedule 2014Ariel ChouNo ratings yet
- Book List For Middle School and 9th Grade 2009-20102Document5 pagesBook List For Middle School and 9th Grade 2009-20102mrsfox100% (1)
- Chapter 15Document21 pagesChapter 15Minhazul AminNo ratings yet
- Geocentric Tropical Placidus True Node: Event ChartDocument1 pageGeocentric Tropical Placidus True Node: Event ChartLuciano DSNo ratings yet
- Access Specifier FinalDocument6 pagesAccess Specifier FinalManojChowdaryNo ratings yet
- Ballast Compatibility: T8 2ft LED Linear Lamp: Replaces 2FT T8/12 LampsDocument16 pagesBallast Compatibility: T8 2ft LED Linear Lamp: Replaces 2FT T8/12 LampsRyan DonerNo ratings yet
- Cultivation of White Button MushroomDocument7 pagesCultivation of White Button MushroomLalzar ZovaNo ratings yet
- MA 511: Computer Programming: Partha Sarathi MandalDocument7 pagesMA 511: Computer Programming: Partha Sarathi MandalNaveen GuptaNo ratings yet
- Ledw0020 03Document9 pagesLedw0020 03Serban StefanNo ratings yet
- LeafletDocument2 pagesLeafletCarlos Jose Sanchez EsparzaNo ratings yet
- SasDocument2 pagesSassravanthiNo ratings yet
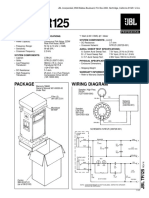
- JBL TR125Document2 pagesJBL TR125Jose Gregorio Ortega CarrilloNo ratings yet
- Precision Statements in UOP MethodsDocument15 pagesPrecision Statements in UOP MethodsDavinNo ratings yet
- Teachers' Challenges in Implementing The Highly Immersive Programme (HIP) in The ClassroomsDocument14 pagesTeachers' Challenges in Implementing The Highly Immersive Programme (HIP) in The ClassroomsNURSHUHADA BINTI MOHD NASIR MoeNo ratings yet
- Modeling BookDocument234 pagesModeling Book梁嫚芳No ratings yet
- Q3 ENGLISH 1 Week 5Document8 pagesQ3 ENGLISH 1 Week 5Ailyn Valenzuela CapellanNo ratings yet
- Vedantu's App & Get: DownloadDocument8 pagesVedantu's App & Get: DownloadAman MahatoNo ratings yet