Download as pdf or txt
You might also like
- Audi A4 B8 Relais Positionen enDocument8 pagesAudi A4 B8 Relais Positionen enAndreasNo ratings yet
- Ultravac (105S Series) Operations ManualDocument64 pagesUltravac (105S Series) Operations ManualMatias Contreras Köbrich100% (1)
- LuXSensing Beacon Batteryless IoT Sensor Design Methodology and Field Test For Sustainable Greenhouse MonitoringDocument13 pagesLuXSensing Beacon Batteryless IoT Sensor Design Methodology and Field Test For Sustainable Greenhouse Monitoringlingaraj kNo ratings yet
- Iot Based Smart Sprinkling System: Rana Johar, Ahmed Bensenouci, Sieee Mohamed-Amine BensenouciDocument6 pagesIot Based Smart Sprinkling System: Rana Johar, Ahmed Bensenouci, Sieee Mohamed-Amine BensenouciJANANI VENKATESANNo ratings yet
- A Smart Traffic Light Using A Microcontroller Based On The Fuzzy LogicDocument10 pagesA Smart Traffic Light Using A Microcontroller Based On The Fuzzy LogicIAES IJAINo ratings yet
- GJRECS30415Document6 pagesGJRECS30415fot199144No ratings yet
- Ijarcce 2023 125159Document4 pagesIjarcce 2023 125159Kishore kumarNo ratings yet
- Water Quality Analysis Using Machine LearningDocument6 pagesWater Quality Analysis Using Machine LearningIJRASETPublicationsNo ratings yet
- Tech SemDocument30 pagesTech Semjustbreathe2206No ratings yet
- Global Transitions Proceedings: Balakrishna K, Rajesh NDocument5 pagesGlobal Transitions Proceedings: Balakrishna K, Rajesh NRagashree GowdaNo ratings yet
- Energy Efficient IoT-Sensors Network For Smart FarmingDocument11 pagesEnergy Efficient IoT-Sensors Network For Smart Farmingmuhd.zikzNo ratings yet
- An Efficient, Optimized and Solar Based Automatic Irrigation System Using GSM ModuleDocument6 pagesAn Efficient, Optimized and Solar Based Automatic Irrigation System Using GSM ModuleIJRASETPublicationsNo ratings yet
- Iot Based Industrial Parameters Monitoring System: Bhilai Institute of Technology, DurgDocument7 pagesIot Based Industrial Parameters Monitoring System: Bhilai Institute of Technology, DurgAbhishek SinghNo ratings yet
- Vijayakumar-Balakrishnan2021 Article ArtificialIntelligence-basedAgDocument8 pagesVijayakumar-Balakrishnan2021 Article ArtificialIntelligence-basedAgKevin David Ortega QuinonesNo ratings yet
- Irrigation - Scheduling and ManagementDocument3 pagesIrrigation - Scheduling and ManagementIJIRSTNo ratings yet
- Ijecet 06 09 004Document9 pagesIjecet 06 09 004IAEME PublicationNo ratings yet
- AgriDocument12 pagesAgriALNATRON GROUPSNo ratings yet
- Field Evaluation of Path-Planning Algorithms For Autonomous Mobile Robot in Smart FarmsDocument14 pagesField Evaluation of Path-Planning Algorithms For Autonomous Mobile Robot in Smart FarmsPrashanth HCNo ratings yet
- GPS Guided Unmanned Ground Vehicle For Agriculture ApplicationsDocument9 pagesGPS Guided Unmanned Ground Vehicle For Agriculture Applicationslederod707No ratings yet
- Iot Based Smart Irrigation SystemDocument16 pagesIot Based Smart Irrigation SystemBhavy ParasharNo ratings yet
- Ag Crop MonitoringDocument7 pagesAg Crop MonitoringAnonymous 5oLqGsWzoNo ratings yet
- Vol 14 No 3 - November 2014Document50 pagesVol 14 No 3 - November 2014ijcsbiNo ratings yet
- 1.1 GeneralDocument48 pages1.1 GeneralSiva KumarNo ratings yet
- Kulkarni 2020 IOP Conf. Ser. Mater. Sci. Eng. 748 012002Document8 pagesKulkarni 2020 IOP Conf. Ser. Mater. Sci. Eng. 748 012002trinidadprincess94No ratings yet
- AjolDocument7 pagesAjolm.hamsyyNo ratings yet
- Design and Construction of A Solar-Powered Automatic Irrigation System With IOT SupportDocument11 pagesDesign and Construction of A Solar-Powered Automatic Irrigation System With IOT SupportDeepak TiwariNo ratings yet
- Study Report On Using Iot Agriculture Farm Monitoring: January 2019Document10 pagesStudy Report On Using Iot Agriculture Farm Monitoring: January 2019kiranNo ratings yet
- Paper 38 LT2017 Io TBased Smart Sprinkling System Final VersionDocument8 pagesPaper 38 LT2017 Io TBased Smart Sprinkling System Final VersionMICHEL RAJ MechNo ratings yet
- SynopsisDocument19 pagesSynopsisstillrules100% (6)
- Agricultural Crop Monitoring Using IOTDocument6 pagesAgricultural Crop Monitoring Using IOTJunaidNo ratings yet
- Review On Cyber-Security For Optimized and Smart Irrigation SystemsDocument9 pagesReview On Cyber-Security For Optimized and Smart Irrigation SystemsTELKOMNIKANo ratings yet
- Smart-Irrigation-System-Using-Arduino-With-Solar-Power - Project ReportDocument8 pagesSmart-Irrigation-System-Using-Arduino-With-Solar-Power - Project ReportAmrish DashNo ratings yet
- Adaptive Power System (Simulation)Document6 pagesAdaptive Power System (Simulation)Yenny BeltranNo ratings yet
- An IoT Based Air and Sound Pollution Monitoring SystemDocument6 pagesAn IoT Based Air and Sound Pollution Monitoring SystemIJRASETPublicationsNo ratings yet
- An Algorithm Based Low Cost Automated System For Irrigation With Soil Moisture SensorDocument5 pagesAn Algorithm Based Low Cost Automated System For Irrigation With Soil Moisture SensorMugdha DokeNo ratings yet
- "Iot Based Smart Agriculture Monitoring and Smart Irrigation System Using ArduinoDocument23 pages"Iot Based Smart Agriculture Monitoring and Smart Irrigation System Using ArduinoNasim KhanNo ratings yet
- Computers and Electronics in Agriculture: Original PapersDocument11 pagesComputers and Electronics in Agriculture: Original PapersDesta Yuhada Triftian JayaNo ratings yet
- Design and Inverse Kinematics Analysis of Cable Suspended Parallel Robot FarmPet' ForDocument12 pagesDesign and Inverse Kinematics Analysis of Cable Suspended Parallel Robot FarmPet' ForIJRASETPublicationsNo ratings yet
- IJRTI2304047Document4 pagesIJRTI2304047Himanshu KumarNo ratings yet
- A Review On Greenhouse Environment Controlling RobotDocument4 pagesA Review On Greenhouse Environment Controlling RobotIRJMETS JOURNALNo ratings yet
- Access Denied Your Page Is Blocked Due To A KIET IT Security Policy That Prohibits Access To Category DefaultDocument6 pagesAccess Denied Your Page Is Blocked Due To A KIET IT Security Policy That Prohibits Access To Category DefaultakttripathiNo ratings yet
- An Automated Energy Meter Reading System Using GSM TechnologyDocument9 pagesAn Automated Energy Meter Reading System Using GSM TechnologyShema kevinNo ratings yet
- File GốcDocument6 pagesFile GốcChiến TrầnNo ratings yet
- Review PaperDocument15 pagesReview Paperdre98makNo ratings yet
- SmartfarmDocument16 pagesSmartfarmJames WandiyaNo ratings yet
- Iot 4Document17 pagesIot 4Akhil JoyNo ratings yet
- Sustainability 14 00827 v2Document20 pagesSustainability 14 00827 v2Nuraisyah samsudinNo ratings yet
- FYP Interim Report 1-Malik Saiful LizanDocument24 pagesFYP Interim Report 1-Malik Saiful LizanMalik SaifulNo ratings yet
- Angshuk Basu - 2K18 - EE - 027 - Anas Ayub - 2K19 - EE - 038Document17 pagesAngshuk Basu - 2K18 - EE - 027 - Anas Ayub - 2K19 - EE - 038Anas AyubNo ratings yet
- Adaptive Air Quality Sensing Using Machine LearningDocument10 pagesAdaptive Air Quality Sensing Using Machine LearningIJRASETPublicationsNo ratings yet
- 1 s2.0 S0960852417304753 MainDocument7 pages1 s2.0 S0960852417304753 MainabdulNo ratings yet
- A Concise Survey Paper On Automated Plant Irrigation SystemDocument7 pagesA Concise Survey Paper On Automated Plant Irrigation SystemIJRASETPublicationsNo ratings yet
- Design and Implementation of A Smart Irrigation System: July 2022Document9 pagesDesign and Implementation of A Smart Irrigation System: July 2022seth fernandoNo ratings yet
- Ijece Icrtecita P136Document4 pagesIjece Icrtecita P136vims1248993No ratings yet
- Ms. K Saranya JtL6Document11 pagesMs. K Saranya JtL6sanjsanjsanjanaNo ratings yet
- (IJETA-V2I3P9) :hemant M Sonawane, DR A.J. PatilDocument4 pages(IJETA-V2I3P9) :hemant M Sonawane, DR A.J. PatilIJETA - EighthSenseGroupNo ratings yet
- Towards Smart Agriculture Monitoring Using Fuzzy SystemsDocument15 pagesTowards Smart Agriculture Monitoring Using Fuzzy SystemsAmalinaAbdullahNo ratings yet
- Arduino Based Smart Vacuum Cleaner RobotDocument11 pagesArduino Based Smart Vacuum Cleaner RobotIJRASETPublicationsNo ratings yet
- Grass CutterDocument4 pagesGrass CutterArufuredo GurenNo ratings yet
- Smart Irrigation System Using IOTDocument6 pagesSmart Irrigation System Using IOTIJRASETPublicationsNo ratings yet
- Smart Agriculture Wireless Sensor Routing Protocol and Node Location Algorithm Based On Internet of Things TechnologyDocument7 pagesSmart Agriculture Wireless Sensor Routing Protocol and Node Location Algorithm Based On Internet of Things TechnologySowmmiya UthayakumarNo ratings yet
- Object Distance Estimation Using A Monovision CameraDocument7 pagesObject Distance Estimation Using A Monovision CameraIAES International Journal of Robotics and AutomationNo ratings yet
- Robotic Inspection and Automated Analysis System For Advanced ManufacturingDocument13 pagesRobotic Inspection and Automated Analysis System For Advanced ManufacturingIAES International Journal of Robotics and AutomationNo ratings yet
- The Use of Artificial Intelligence in Interrogation: Lies and TruthDocument9 pagesThe Use of Artificial Intelligence in Interrogation: Lies and TruthIAES International Journal of Robotics and AutomationNo ratings yet
- Traffic Lights Time Strategy For T-Junctions of Toll Road GateDocument10 pagesTraffic Lights Time Strategy For T-Junctions of Toll Road GateIAES International Journal of Robotics and AutomationNo ratings yet
- Smart Factory For Future Industry DevelopmentDocument5 pagesSmart Factory For Future Industry DevelopmentIAES International Journal of Robotics and AutomationNo ratings yet
- Competition On The Medical Robotics Markets For ElderlyDocument10 pagesCompetition On The Medical Robotics Markets For ElderlyIAES International Journal of Robotics and Automation100% (1)
- Vector-Logic Computing For Faults-As-Address Deductive SimulationDocument15 pagesVector-Logic Computing For Faults-As-Address Deductive SimulationIAES International Journal of Robotics and AutomationNo ratings yet
- CURe-Mi Mobile Manipulator Robot For Contact-Less COVID-19 Patients Serving MissionsDocument12 pagesCURe-Mi Mobile Manipulator Robot For Contact-Less COVID-19 Patients Serving MissionsIAES International Journal of Robotics and AutomationNo ratings yet
- Water Level Control of Small-Scale Recirculating Aquaculture System With Protein Skimmer Using Fuzzy Logic ControllerDocument15 pagesWater Level Control of Small-Scale Recirculating Aquaculture System With Protein Skimmer Using Fuzzy Logic ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Pick-And-Place Application Using A Dual Arm Collaborative Robot and An RGB-D Camera With YOLOv5Document14 pagesPick-And-Place Application Using A Dual Arm Collaborative Robot and An RGB-D Camera With YOLOv5IAES International Journal of Robotics and AutomationNo ratings yet
- Fuzzy-Proportional-Integral-Derivative Hybrid Controller Design For Ultra-High Temperature Milk ProcessingDocument11 pagesFuzzy-Proportional-Integral-Derivative Hybrid Controller Design For Ultra-High Temperature Milk ProcessingIAES International Journal of Robotics and AutomationNo ratings yet
- Real-Time Microreaction Recognition SystemDocument10 pagesReal-Time Microreaction Recognition SystemIAES International Journal of Robotics and AutomationNo ratings yet
- Semi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerDocument12 pagesSemi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Position Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationDocument8 pagesPosition Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationIAES International Journal of Robotics and AutomationNo ratings yet
- On Solving The Kinematics and Controlling of Origami Box-Shaped RobotsDocument13 pagesOn Solving The Kinematics and Controlling of Origami Box-Shaped RobotsIAES International Journal of Robotics and AutomationNo ratings yet
- Development of Image Super-Resolution FrameworkDocument5 pagesDevelopment of Image Super-Resolution FrameworkIAES International Journal of Robotics and AutomationNo ratings yet
- Design of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlDocument10 pagesDesign of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlIAES International Journal of Robotics and AutomationNo ratings yet
- Aerial Robot Swarms: A ReviewDocument9 pagesAerial Robot Swarms: A ReviewIAES International Journal of Robotics and AutomationNo ratings yet
- A Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsDocument14 pagesA Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsIAES International Journal of Robotics and AutomationNo ratings yet
- Model-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceDocument14 pagesModel-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceIAES International Journal of Robotics and AutomationNo ratings yet
- Assembling, Simulating, and Recording Robot Videos As An Effort To Motivate Middle School Students and Teachers of Science in Bengkulu ProvinceDocument11 pagesAssembling, Simulating, and Recording Robot Videos As An Effort To Motivate Middle School Students and Teachers of Science in Bengkulu ProvinceIAES International Journal of Robotics and AutomationNo ratings yet
- Conceptual Design and Simulation Study of An Autonomous Indoor Medical Waste Collection RobotDocument12 pagesConceptual Design and Simulation Study of An Autonomous Indoor Medical Waste Collection RobotIAES International Journal of Robotics and Automation100% (1)
- The Use and Significance of Machine Learning To Screen COVID-19Document9 pagesThe Use and Significance of Machine Learning To Screen COVID-19IAES International Journal of Robotics and AutomationNo ratings yet
- Self-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshDocument16 pagesSelf-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshIAES International Journal of Robotics and AutomationNo ratings yet
- Water Injection Control Modelling by Using Model-Based CalibrationDocument11 pagesWater Injection Control Modelling by Using Model-Based CalibrationIAES International Journal of Robotics and AutomationNo ratings yet
- Synthesis of Control Laws For Magnetic Levitation Systems Based On Serial Invariant ManifoldsDocument10 pagesSynthesis of Control Laws For Magnetic Levitation Systems Based On Serial Invariant ManifoldsIAES International Journal of Robotics and AutomationNo ratings yet
- Microexpression Recognition RobotDocument9 pagesMicroexpression Recognition RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Stabilization of Liquid Level in A Tank System Based On Fuzzy Logic ControllerDocument9 pagesStabilization of Liquid Level in A Tank System Based On Fuzzy Logic ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Mechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesDocument19 pagesMechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesIAES International Journal of Robotics and AutomationNo ratings yet
- Trajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmDocument15 pagesTrajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmIAES International Journal of Robotics and AutomationNo ratings yet
- Week 8Document65 pagesWeek 8sunil kumar sahNo ratings yet
- Celiera Mini Split Air Conditioning Systems ENDocument14 pagesCeliera Mini Split Air Conditioning Systems ENTenny SupNo ratings yet
- FirstStrike FoolsGuideDocument15 pagesFirstStrike FoolsGuidedeep playNo ratings yet
- TL Sine Em330d User Manual v102Document104 pagesTL Sine Em330d User Manual v102Dương Quốc TháiNo ratings yet
- Module 1 IntroductionDocument28 pagesModule 1 IntroductionJHONRUSSEL ANTONIONo ratings yet
- Property Tables and Charts (Si Units) : AppendixDocument31 pagesProperty Tables and Charts (Si Units) : AppendixNero sasukeNo ratings yet
- BELLMARINE GB Jan 2023 LQ-drivemaster-6-7Document2 pagesBELLMARINE GB Jan 2023 LQ-drivemaster-6-7ricardogaravitoNo ratings yet
- Suva 507 Refrigerant: Thermodynamic Properties ofDocument18 pagesSuva 507 Refrigerant: Thermodynamic Properties ofSebastian Andres Catalan BrionesNo ratings yet
- Va195 Abl40.4 107a - SHDocument3 pagesVa195 Abl40.4 107a - SHJaskaran SinghNo ratings yet
- Pending List of Secondary Drawing Upto 26-10 - 2023Document5 pagesPending List of Secondary Drawing Upto 26-10 - 2023Zahidul zahidNo ratings yet
- BP Statistical Review of World Energy 2003 Full ReportDocument39 pagesBP Statistical Review of World Energy 2003 Full ReportChrisNo ratings yet
- 5 Lifetime Extension For SiemensDocument21 pages5 Lifetime Extension For SiemensHiwa KhalediNo ratings yet
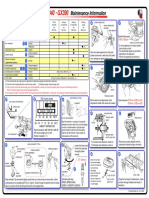
- gx390 MaintenanceDocument1 pagegx390 Maintenancecoyote556No ratings yet
- Catalogue - RWARC - T01 11Document1 pageCatalogue - RWARC - T01 11Project AsyadacNo ratings yet
- Remplacement LVDT Valve 010310 (E)Document20 pagesRemplacement LVDT Valve 010310 (E)Arko RoosNo ratings yet
- Experimental and Theoretical Analysis of A Heat Pipe Heat Exchanger Operating With A Low Global Warming Potential RefrigerantDocument8 pagesExperimental and Theoretical Analysis of A Heat Pipe Heat Exchanger Operating With A Low Global Warming Potential RefrigerantasalazarhNo ratings yet
- Climate Change Impacts On Wind EnergyDocument8 pagesClimate Change Impacts On Wind EnergyPuja Dwi LestariNo ratings yet
- Terminal Alternador Cummins DelcoDocument4 pagesTerminal Alternador Cummins DelcopedroNo ratings yet
- Do 9100 Dissolved Oxygen Meter With Electrode Filling Fluid ManualDocument6 pagesDo 9100 Dissolved Oxygen Meter With Electrode Filling Fluid Manualbioemil86No ratings yet
- Section A Module 1 - Gathering and Processing Information 1. Read The Following Extract Carefully and Then Answer The Questions That FollowDocument2 pagesSection A Module 1 - Gathering and Processing Information 1. Read The Following Extract Carefully and Then Answer The Questions That FollowSelena Reid0% (1)
- Fluke 9118ADocument4 pagesFluke 9118Avijay.victorysolutions01No ratings yet
- Lab Report 1 Major and Minor LossDocument10 pagesLab Report 1 Major and Minor LossEskiasNo ratings yet
- Summer Action Plan 2023Document2 pagesSummer Action Plan 2023SivaPrasad KattaNo ratings yet
- FM PPT 4Document22 pagesFM PPT 4sagar mittalNo ratings yet
- Methods of Determining Initial Fluid Contacts-Abbas Radhi-2022Document12 pagesMethods of Determining Initial Fluid Contacts-Abbas Radhi-2022M MohammedNo ratings yet
- NGH 38Document6 pagesNGH 38Jose Angel Guitart GonzalezNo ratings yet
- AbdkthndkehDocument34 pagesAbdkthndkehAshwini KasarlaNo ratings yet
- Control Valve PositionerDocument20 pagesControl Valve PositionerBrender Victor100% (1)