
Week 12 - Module 10 Finite State Machines 1
Week 12 - Module 10 Finite State Machines 1
You might also like
- MCB-V6 Elevator Integrated Control System: Testing and Commissioning ManualDocument214 pagesMCB-V6 Elevator Integrated Control System: Testing and Commissioning ManualHan MoreyraNo ratings yet
- CET Power - Agil Modular UPS - User Manual - v7.4Document66 pagesCET Power - Agil Modular UPS - User Manual - v7.4Renzo Velarde100% (1)
- Chapter Bit ManipulationDocument14 pagesChapter Bit ManipulationSWAPNILNo ratings yet
- Assignment Coa Wase Wims2019Document8 pagesAssignment Coa Wase Wims2019RAHUL KUMAR RNo ratings yet
- Week 13 - Module 11 Finite State Machines 2Document13 pagesWeek 13 - Module 11 Finite State Machines 2Ben GwenNo ratings yet
- Unit - 1 DSDDocument56 pagesUnit - 1 DSDultimatekp144No ratings yet
- Ce G 3150 Lab 4 Traffic LightDocument22 pagesCe G 3150 Lab 4 Traffic LightAli AhmadNo ratings yet
- VHDL FSM UNIT 5 ET&T 7th SemDocument22 pagesVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARNo ratings yet
- COLab6Document3 pagesCOLab6Qazi SulalNo ratings yet
- DLD Term ProjectDocument10 pagesDLD Term ProjectH052 Rajesh Komaravalli ECENo ratings yet
- Sequential Mealy Machines VHDLSession8 EnotesDocument16 pagesSequential Mealy Machines VHDLSession8 EnotessaravananpaulchamyNo ratings yet
- Capstone ResearchProject Moore Mealy MachineDocument9 pagesCapstone ResearchProject Moore Mealy MachineAnish ChatterjeeNo ratings yet
- Lecture 11Document21 pagesLecture 11fotescuiondaniel7No ratings yet
- Lab 14Document11 pagesLab 14amalkatribNo ratings yet
- 2-Lecture Notes Lesson4 4Document10 pages2-Lecture Notes Lesson4 4kstu1112No ratings yet
- Finite State MachinesDocument17 pagesFinite State Machineslashali1212No ratings yet
- Synchronous CounterDocument12 pagesSynchronous CounterRajasekar PichaimuthuNo ratings yet
- Lab3 Long ReportDocument21 pagesLab3 Long Reportalif fudenNo ratings yet
- Finite State Machines: Moore MachineDocument4 pagesFinite State Machines: Moore Machineborakas_borakasNo ratings yet
- Finite State MachinesDocument8 pagesFinite State MachinesHnd FinalNo ratings yet
- Algorithmic State Machine (ASM) : UnitDocument10 pagesAlgorithmic State Machine (ASM) : Unitateeq mughalNo ratings yet
- Sdic IV NotesDocument13 pagesSdic IV NotesPAVETHRA R SNo ratings yet
- ELE2120 Digital Circuits and Systems: Tutorial Note 9Document25 pagesELE2120 Digital Circuits and Systems: Tutorial Note 9Nelson Ubaldo Quispe MNo ratings yet
- Finite State MachinesDocument60 pagesFinite State MachinesAssistance WorldNo ratings yet
- Finite State Machines: Finite State Machine Next-State FunctionDocument5 pagesFinite State Machines: Finite State Machine Next-State FunctionAnish MathewNo ratings yet
- Lab 2Document22 pagesLab 2Usman KianiNo ratings yet
- Synchronous CountersDocument50 pagesSynchronous CountersJaney24No ratings yet
- DS II 2 Finite State MachineDocument42 pagesDS II 2 Finite State MachineNightkiller StationNo ratings yet
- Control Project ModifiedDocument4 pagesControl Project ModifiedMohamed Elsayed HasanNo ratings yet
- Finite State MachinesDocument55 pagesFinite State Machinesdeepanilsaxena100% (2)
- Logic Circuits: Chapter IntroductionDocument12 pagesLogic Circuits: Chapter IntroductionRabin KoiralaNo ratings yet
- DLC - Unit 2Document30 pagesDLC - Unit 2Bala SubramanianNo ratings yet
- University of Gondar Institute of TechnologyDocument59 pagesUniversity of Gondar Institute of TechnologyamareNo ratings yet
- EXP3Document10 pagesEXP3pilawak670No ratings yet
- FSM SlidesDocument37 pagesFSM SlidesSahil Sharma0% (1)
- How To Design A Finite State Machine Sequence DetectorDocument14 pagesHow To Design A Finite State Machine Sequence Detectorzlh14188No ratings yet
- Lec 13 - Chap 9 - CountersDocument28 pagesLec 13 - Chap 9 - CountersAliRazaNo ratings yet
- ASM2Document8 pagesASM2Sri LathaNo ratings yet
- Mealy and Moore Type Finite State MachinesDocument9 pagesMealy and Moore Type Finite State MachinesNithyendra RoyNo ratings yet
- State Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Document4 pagesState Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Fatmir KelmendiNo ratings yet
- State Tables and State DiagramsDocument3 pagesState Tables and State DiagramsTushar GhoshNo ratings yet
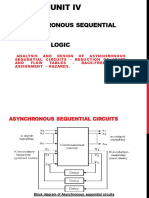
- Unit IvDocument66 pagesUnit IvHarriet Linda CNo ratings yet
- Synchronous Sequential LogicDocument95 pagesSynchronous Sequential LogicGlenda OfianaNo ratings yet
- 2 Chapter 12 Algorithmic State MachineDocument16 pages2 Chapter 12 Algorithmic State MachinekaosadNo ratings yet
- FSM 2Document17 pagesFSM 2Cristian ChitivaNo ratings yet
- Asm 1Document5 pagesAsm 1Jagan RajendiranNo ratings yet
- Consider The Status of Two LED's Counting A SequenceDocument6 pagesConsider The Status of Two LED's Counting A SequencePrafull BNo ratings yet
- Study of The Kitaev Models: Arnab Barman RayDocument20 pagesStudy of The Kitaev Models: Arnab Barman RayArnab Barman RayNo ratings yet
- Unit 5 Sequential MOS Logic CircuitDocument21 pagesUnit 5 Sequential MOS Logic CircuitHarsh kumarNo ratings yet
- Logic Circuit & Switching Theory Sequencial Logic CircuitsDocument67 pagesLogic Circuit & Switching Theory Sequencial Logic CircuitsAngelica FangonNo ratings yet
- Group2 Ece142Document61 pagesGroup2 Ece142Angelica FangonNo ratings yet
- Designing A Data Synchronizer Logic CircuitDocument6 pagesDesigning A Data Synchronizer Logic CircuitbabahussainNo ratings yet
- MethodologyDocument10 pagesMethodologyELLEN CASTILLONo ratings yet
- Lab No.9 Design of Synchronous Counter ObjectivesDocument5 pagesLab No.9 Design of Synchronous Counter Objectivesasadmehmoodsatti786No ratings yet
- Finite State Machines With Output (Mealy and Moore Machines)Document17 pagesFinite State Machines With Output (Mealy and Moore Machines)Satish AripakaNo ratings yet
- Exam 3 Study Questions: Chapters 15-18 of Nelson'S Text, Cascadable Counters, Lc-3, and UartsDocument5 pagesExam 3 Study Questions: Chapters 15-18 of Nelson'S Text, Cascadable Counters, Lc-3, and UartsSyyeda BatoolNo ratings yet
- Synchronous CountersDocument5 pagesSynchronous CountersSebastien PaulNo ratings yet
- Lecture 4. Sequential Logic 2: Prof. Taeweon Suh Computer Science Education Korea UniversityDocument35 pagesLecture 4. Sequential Logic 2: Prof. Taeweon Suh Computer Science Education Korea UniversitySAMIT KARMAKARNo ratings yet
- Basic DFANFA RegularDocument33 pagesBasic DFANFA RegularSouvik GonNo ratings yet
- Rohini 19043599930Document58 pagesRohini 19043599930Bck SreedharNo ratings yet
- Sequence Detector PaperDocument8 pagesSequence Detector PaperVicky RNo ratings yet
- W1 IntroductionDocument12 pagesW1 IntroductionBen GwenNo ratings yet
- W9 Graphs Theory DefinitionsDocument2 pagesW9 Graphs Theory DefinitionsBen GwenNo ratings yet
- Week 11 - Module 9 Sequential Logic CircuitsDocument13 pagesWeek 11 - Module 9 Sequential Logic CircuitsBen GwenNo ratings yet
- Week 13 - Module 11 Finite State Machines 2Document13 pagesWeek 13 - Module 11 Finite State Machines 2Ben GwenNo ratings yet
- Week 12 - Module 10 Finite State Machines 1Document10 pagesWeek 12 - Module 10 Finite State Machines 1Ben GwenNo ratings yet
- Week 11 - Module 9 Sequential Logic CircuitsDocument12 pagesWeek 11 - Module 9 Sequential Logic CircuitsBen GwenNo ratings yet
- Week 9 - Module 8 TimingDocument7 pagesWeek 9 - Module 8 TimingBen GwenNo ratings yet
- Week 4 - Module 4 Boolean Functions and Their FormsDocument7 pagesWeek 4 - Module 4 Boolean Functions and Their FormsBen GwenNo ratings yet
- Week 9 - Module 8 TimingDocument8 pagesWeek 9 - Module 8 TimingBen GwenNo ratings yet
- Week 7 - Module 6 Design of Combinational Circuits 1Document9 pagesWeek 7 - Module 6 Design of Combinational Circuits 1Ben GwenNo ratings yet
- Week 4 - Module 4 Boolean Functions and Their FormsDocument12 pagesWeek 4 - Module 4 Boolean Functions and Their FormsBen GwenNo ratings yet
- Week 3 - Module 3 Boolean AlgebraDocument5 pagesWeek 3 - Module 3 Boolean AlgebraBen GwenNo ratings yet
- Week 6 - Module 5 Karnaugh MapsDocument12 pagesWeek 6 - Module 5 Karnaugh MapsBen GwenNo ratings yet
- Week 1 - Module 1 Number SystemsDocument22 pagesWeek 1 - Module 1 Number SystemsBen GwenNo ratings yet
- Week 6 - Module 5 Karnaugh MapsDocument10 pagesWeek 6 - Module 5 Karnaugh MapsBen GwenNo ratings yet
- Week 2 - Module 2 Binary Logic and Logic GatesDocument10 pagesWeek 2 - Module 2 Binary Logic and Logic GatesBen GwenNo ratings yet
- Week 1 - Module 1 Number SystemsDocument10 pagesWeek 1 - Module 1 Number SystemsBen GwenNo ratings yet
- Week 3 - Module 3 Boolean AlgebraDocument12 pagesWeek 3 - Module 3 Boolean AlgebraBen GwenNo ratings yet
- Week 2 - Module 2 Binary Logic and Logic GatesDocument5 pagesWeek 2 - Module 2 Binary Logic and Logic GatesBen GwenNo ratings yet
- 30RQM/30RQP 160-520: Air-to-Water Scroll Heat Pump With Greenspeed IntelligenceDocument26 pages30RQM/30RQP 160-520: Air-to-Water Scroll Heat Pump With Greenspeed IntelligenceSvetla NikolovaNo ratings yet
- 2V0-620 Examcollection Premium Exam Dumps 173q PDFDocument39 pages2V0-620 Examcollection Premium Exam Dumps 173q PDFMohammad Tufail100% (2)
- Resume AmitJoshiDocument6 pagesResume AmitJoshiAmit JoshiNo ratings yet
- DeltaX-Associate Product Engineer-Job DescriptionDocument12 pagesDeltaX-Associate Product Engineer-Job DescriptionkarthikeyanNo ratings yet
- EDUC 5 Module MidtermDocument32 pagesEDUC 5 Module MidtermCHRISTIAN JAKE ECULLANo ratings yet
- Google - Examcollection.cloud Digital Leader - Pdf.download.2024 May 01.by - Luther.162q.vceDocument6 pagesGoogle - Examcollection.cloud Digital Leader - Pdf.download.2024 May 01.by - Luther.162q.vceShubham MalokarNo ratings yet
- Car Showroom Project FileDocument55 pagesCar Showroom Project FileDr-Sudhir Dutt BhardwajNo ratings yet
- Harsharan Kaur Section 4-2 October 10, 2020Document14 pagesHarsharan Kaur Section 4-2 October 10, 2020Sonia KaurNo ratings yet
- Stage 3 - Developed Design ChecklistDocument16 pagesStage 3 - Developed Design ChecklistVirah Sammy ChandraNo ratings yet
- HandoffDocument7 pagesHandoffRajdeep JindalNo ratings yet
- MCSL-204 Windows and Linux LabDocument49 pagesMCSL-204 Windows and Linux LabAlok SharmaNo ratings yet
- AWS Certified SysOp Administrator GuideDocument5 pagesAWS Certified SysOp Administrator Guidekeepalive20100% (1)
- WP - Firmware Hacking, Slash The Pineapple For Fun (En)Document21 pagesWP - Firmware Hacking, Slash The Pineapple For Fun (En)peperNo ratings yet
- Barangay Management Information System: Background of The StudyDocument6 pagesBarangay Management Information System: Background of The StudyRodjean SimballaNo ratings yet
- Capstone Project Proposal Draft Student Fillable 1Document6 pagesCapstone Project Proposal Draft Student Fillable 1api-653572023No ratings yet
- SNMP Traps Zabbix ManualDocument8 pagesSNMP Traps Zabbix ManualffNo ratings yet
- GazePointer JournalDocument12 pagesGazePointer JournalHaison AliNo ratings yet
- INE - Introduction To CCIE SPv4Document21 pagesINE - Introduction To CCIE SPv4kyi lwinNo ratings yet
- Pantallas 08 02 2024 Local 328 y Local 347 City MDocument150 pagesPantallas 08 02 2024 Local 328 y Local 347 City Minvdannyfernandes85No ratings yet
- A Chave de Salomao Jose Rodrigues Dos Santos PDF Aws - CompressDocument2 pagesA Chave de Salomao Jose Rodrigues Dos Santos PDF Aws - Compressvictor santosNo ratings yet
- Computer SystemsDocument13 pagesComputer Systemsgabriel chinechenduNo ratings yet
- GTP Firewall in 4G and 5G Mobile Networks: Strong Protection For All GTP InterfacesDocument4 pagesGTP Firewall in 4G and 5G Mobile Networks: Strong Protection For All GTP InterfacesAnilNo ratings yet
- Awa Se E Dura GiyaDocument6 pagesAwa Se E Dura GiyaChathura KumaraNo ratings yet
- Landis+Gyr HIGH PRECISION METERING ZMQ202 User ManualDocument88 pagesLandis+Gyr HIGH PRECISION METERING ZMQ202 User ManualBilal WNo ratings yet
- Iphone Configuration UtilityDocument20 pagesIphone Configuration UtilityDon MathesNo ratings yet
- Anr 6.42 (64200002) 0Document10 pagesAnr 6.42 (64200002) 0Moni SainjakitNo ratings yet








































































































Download as pdf or txt
You might also like
- MCB-V6 Elevator Integrated Control System: Testing and Commissioning ManualDocument214 pagesMCB-V6 Elevator Integrated Control System: Testing and Commissioning ManualHan MoreyraNo ratings yet
- CET Power - Agil Modular UPS - User Manual - v7.4Document66 pagesCET Power - Agil Modular UPS - User Manual - v7.4Renzo Velarde100% (1)
- Chapter Bit ManipulationDocument14 pagesChapter Bit ManipulationSWAPNILNo ratings yet
- Assignment Coa Wase Wims2019Document8 pagesAssignment Coa Wase Wims2019RAHUL KUMAR RNo ratings yet
- Week 13 - Module 11 Finite State Machines 2Document13 pagesWeek 13 - Module 11 Finite State Machines 2Ben GwenNo ratings yet
- Unit - 1 DSDDocument56 pagesUnit - 1 DSDultimatekp144No ratings yet
- Ce G 3150 Lab 4 Traffic LightDocument22 pagesCe G 3150 Lab 4 Traffic LightAli AhmadNo ratings yet
- VHDL FSM UNIT 5 ET&T 7th SemDocument22 pagesVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARNo ratings yet
- COLab6Document3 pagesCOLab6Qazi SulalNo ratings yet
- DLD Term ProjectDocument10 pagesDLD Term ProjectH052 Rajesh Komaravalli ECENo ratings yet
- Sequential Mealy Machines VHDLSession8 EnotesDocument16 pagesSequential Mealy Machines VHDLSession8 EnotessaravananpaulchamyNo ratings yet
- Capstone ResearchProject Moore Mealy MachineDocument9 pagesCapstone ResearchProject Moore Mealy MachineAnish ChatterjeeNo ratings yet
- Lecture 11Document21 pagesLecture 11fotescuiondaniel7No ratings yet
- Lab 14Document11 pagesLab 14amalkatribNo ratings yet
- 2-Lecture Notes Lesson4 4Document10 pages2-Lecture Notes Lesson4 4kstu1112No ratings yet
- Finite State MachinesDocument17 pagesFinite State Machineslashali1212No ratings yet
- Synchronous CounterDocument12 pagesSynchronous CounterRajasekar PichaimuthuNo ratings yet
- Lab3 Long ReportDocument21 pagesLab3 Long Reportalif fudenNo ratings yet
- Finite State Machines: Moore MachineDocument4 pagesFinite State Machines: Moore Machineborakas_borakasNo ratings yet
- Finite State MachinesDocument8 pagesFinite State MachinesHnd FinalNo ratings yet
- Algorithmic State Machine (ASM) : UnitDocument10 pagesAlgorithmic State Machine (ASM) : Unitateeq mughalNo ratings yet
- Sdic IV NotesDocument13 pagesSdic IV NotesPAVETHRA R SNo ratings yet
- ELE2120 Digital Circuits and Systems: Tutorial Note 9Document25 pagesELE2120 Digital Circuits and Systems: Tutorial Note 9Nelson Ubaldo Quispe MNo ratings yet
- Finite State MachinesDocument60 pagesFinite State MachinesAssistance WorldNo ratings yet
- Finite State Machines: Finite State Machine Next-State FunctionDocument5 pagesFinite State Machines: Finite State Machine Next-State FunctionAnish MathewNo ratings yet
- Lab 2Document22 pagesLab 2Usman KianiNo ratings yet
- Synchronous CountersDocument50 pagesSynchronous CountersJaney24No ratings yet
- DS II 2 Finite State MachineDocument42 pagesDS II 2 Finite State MachineNightkiller StationNo ratings yet
- Control Project ModifiedDocument4 pagesControl Project ModifiedMohamed Elsayed HasanNo ratings yet
- Finite State MachinesDocument55 pagesFinite State Machinesdeepanilsaxena100% (2)
- Logic Circuits: Chapter IntroductionDocument12 pagesLogic Circuits: Chapter IntroductionRabin KoiralaNo ratings yet
- DLC - Unit 2Document30 pagesDLC - Unit 2Bala SubramanianNo ratings yet
- University of Gondar Institute of TechnologyDocument59 pagesUniversity of Gondar Institute of TechnologyamareNo ratings yet
- EXP3Document10 pagesEXP3pilawak670No ratings yet
- FSM SlidesDocument37 pagesFSM SlidesSahil Sharma0% (1)
- How To Design A Finite State Machine Sequence DetectorDocument14 pagesHow To Design A Finite State Machine Sequence Detectorzlh14188No ratings yet
- Lec 13 - Chap 9 - CountersDocument28 pagesLec 13 - Chap 9 - CountersAliRazaNo ratings yet
- ASM2Document8 pagesASM2Sri LathaNo ratings yet
- Mealy and Moore Type Finite State MachinesDocument9 pagesMealy and Moore Type Finite State MachinesNithyendra RoyNo ratings yet
- State Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Document4 pagesState Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Fatmir KelmendiNo ratings yet
- State Tables and State DiagramsDocument3 pagesState Tables and State DiagramsTushar GhoshNo ratings yet
- Unit IvDocument66 pagesUnit IvHarriet Linda CNo ratings yet
- Synchronous Sequential LogicDocument95 pagesSynchronous Sequential LogicGlenda OfianaNo ratings yet
- 2 Chapter 12 Algorithmic State MachineDocument16 pages2 Chapter 12 Algorithmic State MachinekaosadNo ratings yet
- FSM 2Document17 pagesFSM 2Cristian ChitivaNo ratings yet
- Asm 1Document5 pagesAsm 1Jagan RajendiranNo ratings yet
- Consider The Status of Two LED's Counting A SequenceDocument6 pagesConsider The Status of Two LED's Counting A SequencePrafull BNo ratings yet
- Study of The Kitaev Models: Arnab Barman RayDocument20 pagesStudy of The Kitaev Models: Arnab Barman RayArnab Barman RayNo ratings yet
- Unit 5 Sequential MOS Logic CircuitDocument21 pagesUnit 5 Sequential MOS Logic CircuitHarsh kumarNo ratings yet
- Logic Circuit & Switching Theory Sequencial Logic CircuitsDocument67 pagesLogic Circuit & Switching Theory Sequencial Logic CircuitsAngelica FangonNo ratings yet
- Group2 Ece142Document61 pagesGroup2 Ece142Angelica FangonNo ratings yet
- Designing A Data Synchronizer Logic CircuitDocument6 pagesDesigning A Data Synchronizer Logic CircuitbabahussainNo ratings yet
- MethodologyDocument10 pagesMethodologyELLEN CASTILLONo ratings yet
- Lab No.9 Design of Synchronous Counter ObjectivesDocument5 pagesLab No.9 Design of Synchronous Counter Objectivesasadmehmoodsatti786No ratings yet
- Finite State Machines With Output (Mealy and Moore Machines)Document17 pagesFinite State Machines With Output (Mealy and Moore Machines)Satish AripakaNo ratings yet
- Exam 3 Study Questions: Chapters 15-18 of Nelson'S Text, Cascadable Counters, Lc-3, and UartsDocument5 pagesExam 3 Study Questions: Chapters 15-18 of Nelson'S Text, Cascadable Counters, Lc-3, and UartsSyyeda BatoolNo ratings yet
- Synchronous CountersDocument5 pagesSynchronous CountersSebastien PaulNo ratings yet
- Lecture 4. Sequential Logic 2: Prof. Taeweon Suh Computer Science Education Korea UniversityDocument35 pagesLecture 4. Sequential Logic 2: Prof. Taeweon Suh Computer Science Education Korea UniversitySAMIT KARMAKARNo ratings yet
- Basic DFANFA RegularDocument33 pagesBasic DFANFA RegularSouvik GonNo ratings yet
- Rohini 19043599930Document58 pagesRohini 19043599930Bck SreedharNo ratings yet
- Sequence Detector PaperDocument8 pagesSequence Detector PaperVicky RNo ratings yet
- W1 IntroductionDocument12 pagesW1 IntroductionBen GwenNo ratings yet
- W9 Graphs Theory DefinitionsDocument2 pagesW9 Graphs Theory DefinitionsBen GwenNo ratings yet
- Week 11 - Module 9 Sequential Logic CircuitsDocument13 pagesWeek 11 - Module 9 Sequential Logic CircuitsBen GwenNo ratings yet
- Week 13 - Module 11 Finite State Machines 2Document13 pagesWeek 13 - Module 11 Finite State Machines 2Ben GwenNo ratings yet
- Week 12 - Module 10 Finite State Machines 1Document10 pagesWeek 12 - Module 10 Finite State Machines 1Ben GwenNo ratings yet
- Week 11 - Module 9 Sequential Logic CircuitsDocument12 pagesWeek 11 - Module 9 Sequential Logic CircuitsBen GwenNo ratings yet
- Week 9 - Module 8 TimingDocument7 pagesWeek 9 - Module 8 TimingBen GwenNo ratings yet
- Week 4 - Module 4 Boolean Functions and Their FormsDocument7 pagesWeek 4 - Module 4 Boolean Functions and Their FormsBen GwenNo ratings yet
- Week 9 - Module 8 TimingDocument8 pagesWeek 9 - Module 8 TimingBen GwenNo ratings yet
- Week 7 - Module 6 Design of Combinational Circuits 1Document9 pagesWeek 7 - Module 6 Design of Combinational Circuits 1Ben GwenNo ratings yet
- Week 4 - Module 4 Boolean Functions and Their FormsDocument12 pagesWeek 4 - Module 4 Boolean Functions and Their FormsBen GwenNo ratings yet
- Week 3 - Module 3 Boolean AlgebraDocument5 pagesWeek 3 - Module 3 Boolean AlgebraBen GwenNo ratings yet
- Week 6 - Module 5 Karnaugh MapsDocument12 pagesWeek 6 - Module 5 Karnaugh MapsBen GwenNo ratings yet
- Week 1 - Module 1 Number SystemsDocument22 pagesWeek 1 - Module 1 Number SystemsBen GwenNo ratings yet
- Week 6 - Module 5 Karnaugh MapsDocument10 pagesWeek 6 - Module 5 Karnaugh MapsBen GwenNo ratings yet
- Week 2 - Module 2 Binary Logic and Logic GatesDocument10 pagesWeek 2 - Module 2 Binary Logic and Logic GatesBen GwenNo ratings yet
- Week 1 - Module 1 Number SystemsDocument10 pagesWeek 1 - Module 1 Number SystemsBen GwenNo ratings yet
- Week 3 - Module 3 Boolean AlgebraDocument12 pagesWeek 3 - Module 3 Boolean AlgebraBen GwenNo ratings yet
- Week 2 - Module 2 Binary Logic and Logic GatesDocument5 pagesWeek 2 - Module 2 Binary Logic and Logic GatesBen GwenNo ratings yet
- 30RQM/30RQP 160-520: Air-to-Water Scroll Heat Pump With Greenspeed IntelligenceDocument26 pages30RQM/30RQP 160-520: Air-to-Water Scroll Heat Pump With Greenspeed IntelligenceSvetla NikolovaNo ratings yet
- 2V0-620 Examcollection Premium Exam Dumps 173q PDFDocument39 pages2V0-620 Examcollection Premium Exam Dumps 173q PDFMohammad Tufail100% (2)
- Resume AmitJoshiDocument6 pagesResume AmitJoshiAmit JoshiNo ratings yet
- DeltaX-Associate Product Engineer-Job DescriptionDocument12 pagesDeltaX-Associate Product Engineer-Job DescriptionkarthikeyanNo ratings yet
- EDUC 5 Module MidtermDocument32 pagesEDUC 5 Module MidtermCHRISTIAN JAKE ECULLANo ratings yet
- Google - Examcollection.cloud Digital Leader - Pdf.download.2024 May 01.by - Luther.162q.vceDocument6 pagesGoogle - Examcollection.cloud Digital Leader - Pdf.download.2024 May 01.by - Luther.162q.vceShubham MalokarNo ratings yet
- Car Showroom Project FileDocument55 pagesCar Showroom Project FileDr-Sudhir Dutt BhardwajNo ratings yet
- Harsharan Kaur Section 4-2 October 10, 2020Document14 pagesHarsharan Kaur Section 4-2 October 10, 2020Sonia KaurNo ratings yet
- Stage 3 - Developed Design ChecklistDocument16 pagesStage 3 - Developed Design ChecklistVirah Sammy ChandraNo ratings yet
- HandoffDocument7 pagesHandoffRajdeep JindalNo ratings yet
- MCSL-204 Windows and Linux LabDocument49 pagesMCSL-204 Windows and Linux LabAlok SharmaNo ratings yet
- AWS Certified SysOp Administrator GuideDocument5 pagesAWS Certified SysOp Administrator Guidekeepalive20100% (1)
- WP - Firmware Hacking, Slash The Pineapple For Fun (En)Document21 pagesWP - Firmware Hacking, Slash The Pineapple For Fun (En)peperNo ratings yet
- Barangay Management Information System: Background of The StudyDocument6 pagesBarangay Management Information System: Background of The StudyRodjean SimballaNo ratings yet
- Capstone Project Proposal Draft Student Fillable 1Document6 pagesCapstone Project Proposal Draft Student Fillable 1api-653572023No ratings yet
- SNMP Traps Zabbix ManualDocument8 pagesSNMP Traps Zabbix ManualffNo ratings yet
- GazePointer JournalDocument12 pagesGazePointer JournalHaison AliNo ratings yet
- INE - Introduction To CCIE SPv4Document21 pagesINE - Introduction To CCIE SPv4kyi lwinNo ratings yet
- Pantallas 08 02 2024 Local 328 y Local 347 City MDocument150 pagesPantallas 08 02 2024 Local 328 y Local 347 City Minvdannyfernandes85No ratings yet
- A Chave de Salomao Jose Rodrigues Dos Santos PDF Aws - CompressDocument2 pagesA Chave de Salomao Jose Rodrigues Dos Santos PDF Aws - Compressvictor santosNo ratings yet
- Computer SystemsDocument13 pagesComputer Systemsgabriel chinechenduNo ratings yet
- GTP Firewall in 4G and 5G Mobile Networks: Strong Protection For All GTP InterfacesDocument4 pagesGTP Firewall in 4G and 5G Mobile Networks: Strong Protection For All GTP InterfacesAnilNo ratings yet
- Awa Se E Dura GiyaDocument6 pagesAwa Se E Dura GiyaChathura KumaraNo ratings yet
- Landis+Gyr HIGH PRECISION METERING ZMQ202 User ManualDocument88 pagesLandis+Gyr HIGH PRECISION METERING ZMQ202 User ManualBilal WNo ratings yet
- Iphone Configuration UtilityDocument20 pagesIphone Configuration UtilityDon MathesNo ratings yet
- Anr 6.42 (64200002) 0Document10 pagesAnr 6.42 (64200002) 0Moni SainjakitNo ratings yet