Download as pdf or txt
You might also like
- Lab 9 - Motion of FluidsDocument8 pagesLab 9 - Motion of Fluidsconstantine1106No ratings yet
- Jrs Tutorials: CalorimetryDocument4 pagesJrs Tutorials: CalorimetryPriyanshu Gupta100% (1)
- Fluid Mechanics Lab-I (Report)Document18 pagesFluid Mechanics Lab-I (Report)Mohammad Usman HabibNo ratings yet
- Lab Manual 3.1 - LEVEL 1 - Determination of Head Loss in Pipes Due To Friction, Fittings, Sudden Expansion and Contraction.Document4 pagesLab Manual 3.1 - LEVEL 1 - Determination of Head Loss in Pipes Due To Friction, Fittings, Sudden Expansion and Contraction.Coi50% (2)
- Autrique 2013 IOP Conf. Ser.: Mater. Sci. Eng. 52 022022Document8 pagesAutrique 2013 IOP Conf. Ser.: Mater. Sci. Eng. 52 022022curlyprachiNo ratings yet
- Leak Detection in Water-Distribution Pipe System: June 2018Document5 pagesLeak Detection in Water-Distribution Pipe System: June 2018Sai PhanindraNo ratings yet
- Mansour2015 - Design of A Novel In-Pipe Reliable Leak DetectorDocument11 pagesMansour2015 - Design of A Novel In-Pipe Reliable Leak DetectorHenriqueNo ratings yet
- An Intelligent Flow Measuring Technique Using Venturi: March 2012Document7 pagesAn Intelligent Flow Measuring Technique Using Venturi: March 2012Ayman N YassinNo ratings yet
- Spe 18370 MSDocument11 pagesSpe 18370 MSAT8iNo ratings yet
- J Optlastec 2016 02 015Document6 pagesJ Optlastec 2016 02 015EDO SUNARDINo ratings yet
- OTC-25111-MS Evaluation of A Composite Device With An Embedded Non-Intrusive Water Cut Sensing Platform For Production Tubing and Well CompletionsDocument9 pagesOTC-25111-MS Evaluation of A Composite Device With An Embedded Non-Intrusive Water Cut Sensing Platform For Production Tubing and Well CompletionsLeon ZidaneNo ratings yet
- Andreasen Et Al 2020Document28 pagesAndreasen Et Al 2020acidoanimalNo ratings yet
- SPE 77655 Downhole Fiber-Optic Multiphase Flowmeter: Design, Operating Principle, and TestingDocument7 pagesSPE 77655 Downhole Fiber-Optic Multiphase Flowmeter: Design, Operating Principle, and TestingTheNourEldenNo ratings yet
- Uncertainty and Reproducibility Analysis of A Laboratorial Scaled Pipe ProverDocument8 pagesUncertainty and Reproducibility Analysis of A Laboratorial Scaled Pipe ProverOrlando GomezNo ratings yet
- FEDSM-ICNMM2010-30775: Gas Liquid Vane Separators in High Pressure ApplicationsDocument5 pagesFEDSM-ICNMM2010-30775: Gas Liquid Vane Separators in High Pressure ApplicationsAmine BennouriNo ratings yet
- Study of Different Types of Valves & Determination of Minor Head Loss For Various Openings of Locally Available Plastic ValveDocument5 pagesStudy of Different Types of Valves & Determination of Minor Head Loss For Various Openings of Locally Available Plastic ValveMEER MUSTAFA ALINo ratings yet
- SSTMokni Ines 2019Document15 pagesSSTMokni Ines 2019fajar kusumaNo ratings yet
- 62-69 Engineer's Notebook DudaDocument5 pages62-69 Engineer's Notebook DudaMichael LagundinoNo ratings yet
- 1A 02 ASCEBianchiDocument5 pages1A 02 ASCEBianchiOth MellalNo ratings yet
- Upstream Operations in The Oil Industry Rigorous MDocument12 pagesUpstream Operations in The Oil Industry Rigorous MShakerMahmoodNo ratings yet
- 2013 - The Monitoring of The Two Phase Flow-Annular Flow Type Regime Using Microwave Sensor TechniqueDocument7 pages2013 - The Monitoring of The Two Phase Flow-Annular Flow Type Regime Using Microwave Sensor Techniqueh3r0n3duNo ratings yet
- A Coupled Volume of Fluid and Immersed Boundary Method For Simulating 3D Multiphase Flows With Contact Line Dynamics in Complex GeometriesDocument15 pagesA Coupled Volume of Fluid and Immersed Boundary Method For Simulating 3D Multiphase Flows With Contact Line Dynamics in Complex GeometriesTing-Yu ChengNo ratings yet
- Miniature Liquid Flow Sensor and Feedback ControlDocument7 pagesMiniature Liquid Flow Sensor and Feedback ControlBeenish MirzaNo ratings yet
- Ii Ii Two Mark 2 MarksDocument37 pagesIi Ii Two Mark 2 MarksSATHISHNo ratings yet
- CPT-350 15 PipelineDocument74 pagesCPT-350 15 PipelineJeeEianYannNo ratings yet
- Corse ProjectDocument21 pagesCorse ProjectsydbwlanNo ratings yet
- Dissolved Oxygen MeasurementDocument5 pagesDissolved Oxygen Measurementraju1559405No ratings yet
- Horizontal PLT With Slotted-Liner Completion To Diagnose Annular Flow PDFDocument13 pagesHorizontal PLT With Slotted-Liner Completion To Diagnose Annular Flow PDFLaura DemarchNo ratings yet
- Use of Weir and Flames For Stream GaugingDocument66 pagesUse of Weir and Flames For Stream GaugingarjmandquestNo ratings yet
- Schubert2016 PDFDocument9 pagesSchubert2016 PDFDWNLD USRMLNo ratings yet
- Valve Minor HeadlossDocument5 pagesValve Minor HeadlossAbhishek Kumar SinhaNo ratings yet
- Evaluation - of - Erosion-Corrosion - in - Multiphase - Flow (Imprt)Document10 pagesEvaluation - of - Erosion-Corrosion - in - Multiphase - Flow (Imprt)Mahfoud AMMOURNo ratings yet
- Flow Measurement 2001 - International Conference - Creating Efficiency Across Industry SectorsDocument13 pagesFlow Measurement 2001 - International Conference - Creating Efficiency Across Industry SectorsSArulManojNo ratings yet
- Sanchez 2005Document10 pagesSanchez 2005jacobo solanoNo ratings yet
- The Floating Water BridgeDocument6 pagesThe Floating Water BridgePablo AlvinNo ratings yet
- SPE Mexico Corrosion 06Document9 pagesSPE Mexico Corrosion 06henbauNo ratings yet
- Automated Horizontal Slurry Flow Regime RecognitioDocument11 pagesAutomated Horizontal Slurry Flow Regime RecognitioCalberttNo ratings yet
- Hutagalung 2019 J. Phys. Conf. Ser. 1230 012086Document12 pagesHutagalung 2019 J. Phys. Conf. Ser. 1230 012086christian.canaleNo ratings yet
- Ijmqe 180001Document8 pagesIjmqe 180001Tan TranNo ratings yet
- Venturimodeling Aiche 1998Document13 pagesVenturimodeling Aiche 1998Gerardo Agurto LescanoNo ratings yet
- 14 Optimization of Shell Tube Heat Exchanger by Baffle Inclination Baffle Cut-1Document5 pages14 Optimization of Shell Tube Heat Exchanger by Baffle Inclination Baffle Cut-1PramodNo ratings yet
- SPE 72150 Evaluations of Sub Horizontal Well Performance With Optical and Electrical ProbesDocument10 pagesSPE 72150 Evaluations of Sub Horizontal Well Performance With Optical and Electrical ProbesheydaripostNo ratings yet
- Oscillatory Flowmeters: An Effective Solution For Flow MeasurementDocument3 pagesOscillatory Flowmeters: An Effective Solution For Flow Measurementyensi riascosNo ratings yet
- Case Histories of Production LoggingDocument7 pagesCase Histories of Production LoggingLulut Fitra FalaNo ratings yet
- Behavior of A Pneumatic Pressure Regulator Valve Under Leakage CircumstancesDocument7 pagesBehavior of A Pneumatic Pressure Regulator Valve Under Leakage CircumstancesbadaboyNo ratings yet
- Efective Leak DetectionDocument10 pagesEfective Leak DetectionEfren RamirezNo ratings yet
- Analysis of Performance of V-Cone Meter - Experimental & CFDDocument7 pagesAnalysis of Performance of V-Cone Meter - Experimental & CFDpratheesh91No ratings yet
- OMAE2004 51219 FinalDocument5 pagesOMAE2004 51219 FinalThejaswiniNo ratings yet
- ASME IMECE 2015 Paper FINALDocument14 pagesASME IMECE 2015 Paper FINALVigor ModemNo ratings yet
- A Review of Gravity Three-Phase Separators: February 2017Document12 pagesA Review of Gravity Three-Phase Separators: February 2017Jose LozanoNo ratings yet
- 1 s2.0 S1877705817313796 MainDocument8 pages1 s2.0 S1877705817313796 MainvanbuochoangctNo ratings yet
- Unesco - Eolss Sample Chapters: Vacuum Creating EquipmentDocument7 pagesUnesco - Eolss Sample Chapters: Vacuum Creating Equipmentahmed nawaz100% (1)
- Bremann Paschen DDocument16 pagesBremann Paschen DSenathipathi KalimuthuNo ratings yet
- Flow Analysis of Butterfly Valve Using CFD: JournalDocument7 pagesFlow Analysis of Butterfly Valve Using CFD: JournalMary Grace VelitarioNo ratings yet
- Installation and Operation of Densitometers 2205Document4 pagesInstallation and Operation of Densitometers 2205CRT ServicesNo ratings yet
- Fluids 2 Lab Report 4 FinalDocument9 pagesFluids 2 Lab Report 4 FinalJay-ar BensOnNo ratings yet
- Simulation of Full-Bore Tube Rupture in Shell&Tube Heat ExchangerDocument6 pagesSimulation of Full-Bore Tube Rupture in Shell&Tube Heat ExchangerMoca PhoenixNo ratings yet
- Hajajs HSJD FDocument11 pagesHajajs HSJD FRohan PrajapatiNo ratings yet
- Flow Measurement Methods Applied To Hydro Power Plants: March 2012Document19 pagesFlow Measurement Methods Applied To Hydro Power Plants: March 2012João Marcos Monteiro BernardesNo ratings yet
- Parametric Approach For The Optimal Design of Knockout DrumsDocument11 pagesParametric Approach For The Optimal Design of Knockout DrumsYamen SleimanNo ratings yet
- Methodologies for Assessing Pipe Failure Rates in Advanced Water Cooled ReactorsFrom EverandMethodologies for Assessing Pipe Failure Rates in Advanced Water Cooled ReactorsNo ratings yet
- Sewage Disposal Works: Their Design and ConstructionFrom EverandSewage Disposal Works: Their Design and ConstructionNo ratings yet
- United States Patent (19) 11) Patent Number: 4,811,792Document8 pagesUnited States Patent (19) 11) Patent Number: 4,811,792MuhammadNo ratings yet
- US20100012315A1Document6 pagesUS20100012315A1MuhammadNo ratings yet
- Asiasašease&: (12) United States Patent (10) Patent No.: Us 9,097,086 B2Document13 pagesAsiasašease&: (12) United States Patent (10) Patent No.: Us 9,097,086 B2MuhammadNo ratings yet
- CA2642724CDocument24 pagesCA2642724CMuhammadNo ratings yet
- CM50175 - Coursework 1 - Project Proposal SpecificationDocument3 pagesCM50175 - Coursework 1 - Project Proposal SpecificationMuhammadNo ratings yet
- TEPZZ 7 7 - 64B - T: European Patent SpecificationDocument19 pagesTEPZZ 7 7 - 64B - T: European Patent SpecificationMuhammadNo ratings yet
- CAN304 Assessment 1: Literature Review Assessment 1Document2 pagesCAN304 Assessment 1: Literature Review Assessment 1MuhammadNo ratings yet
- Goals and BackgroundDocument5 pagesGoals and BackgroundMuhammadNo ratings yet
- 1 - SA Assignment 2Document11 pages1 - SA Assignment 2MuhammadNo ratings yet
- nc200v1 1Document8 pagesnc200v1 1MuhammadNo ratings yet
- LLP109 Coursework - C: AssignmentDocument1 pageLLP109 Coursework - C: AssignmentMuhammadNo ratings yet
- New Method For Data Communication Over Power-Line Career: July 2016Document11 pagesNew Method For Data Communication Over Power-Line Career: July 2016MuhammadNo ratings yet
- MP Avt 357 11Document14 pagesMP Avt 357 11MuhammadNo ratings yet
- 2N3054 2N3054A Silicon NPN Power Transistors DescriptionDocument4 pages2N3054 2N3054A Silicon NPN Power Transistors DescriptionMuhammadNo ratings yet
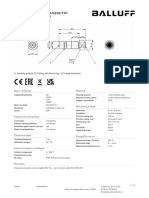
- BCS Z094401-XXS20B-SZ02-T07 Order Code: BCS013E: Capacitive SensorsDocument2 pagesBCS Z094401-XXS20B-SZ02-T07 Order Code: BCS013E: Capacitive SensorsMuhammadNo ratings yet
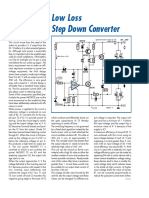
- Low Loss Step Down Converter: Michel FrankeDocument1 pageLow Loss Step Down Converter: Michel FrankeJosé ManuelNo ratings yet
- Guidance Note 6 - Protection Against Overcurrent (IEE Guidence Notes) (No 6) (PDDocument2 pagesGuidance Note 6 - Protection Against Overcurrent (IEE Guidence Notes) (No 6) (PDbuddhika MadusankaNo ratings yet
- Bulk Density ("Unit Weight") and Voids in Aggregate: Standard Test Method ForDocument5 pagesBulk Density ("Unit Weight") and Voids in Aggregate: Standard Test Method ForHandyNo ratings yet
- MetrologyDocument132 pagesMetrologyAd Man GeTig0% (1)
- Work Energy and PowerDocument13 pagesWork Energy and PowerLlama jennerNo ratings yet
- Fundamentals of Surveying and MappingDocument128 pagesFundamentals of Surveying and MappingBudzz V. Lupio Jr.No ratings yet
- Gravitation SolutionsDocument30 pagesGravitation Solutionsshreevardhansingh93No ratings yet
- Topic 4.4 FormativeDocument2 pagesTopic 4.4 FormativebubbleteaNo ratings yet
- Chapter 8 PDFDocument20 pagesChapter 8 PDFSudipto Sarker SuptoNo ratings yet
- Weight Box (E2 Class)Document2 pagesWeight Box (E2 Class)Calibration Services100% (1)
- 5th Weekly Exam - Plumbing ArithmeticDocument11 pages5th Weekly Exam - Plumbing ArithmeticArchie Gomocag0% (1)
- Measurement Lab ReportDocument9 pagesMeasurement Lab ReportSIRAWAT AKSORNSUWANNo ratings yet
- Wiring Ac Doorstrike ButterflymxDocument1 pageWiring Ac Doorstrike ButterflymxadenijisegunNo ratings yet
- Adobe Scan 29-Dec-2023Document5 pagesAdobe Scan 29-Dec-2023theindiandragon5367No ratings yet
- Atomic Absorption PresentationDocument23 pagesAtomic Absorption PresentationMani JeeNo ratings yet
- HMT216B LAB REPORT (Final)Document22 pagesHMT216B LAB REPORT (Final)Solethu MthembuNo ratings yet
- Thermodynamics Chapter 1Document36 pagesThermodynamics Chapter 1WILYNo ratings yet
- Wolfson Eup3 ch06 Test BankDocument22 pagesWolfson Eup3 ch06 Test Bank陳禹誌No ratings yet
- Military Institute of Science & TechnologyDocument3 pagesMilitary Institute of Science & Technologyahmed rifatNo ratings yet
- Electronic Balance.....Document15 pagesElectronic Balance.....Bilal RiadhNo ratings yet
- TechnicalGuideUV VISSpectrophotometerDocument13 pagesTechnicalGuideUV VISSpectrophotometereduardo celedonNo ratings yet
- Analytical Calculation of Proximity-Effect Resistance For Planar Coil With Litz Wire and Ferrite Plate in Inductive Power TransferDocument8 pagesAnalytical Calculation of Proximity-Effect Resistance For Planar Coil With Litz Wire and Ferrite Plate in Inductive Power TransfershuangwenNo ratings yet
- Prismatic Open Channel SolutionsDocument27 pagesPrismatic Open Channel SolutionsresearchditNo ratings yet
- Erdas مقدمة إلى برنامجDocument24 pagesErdas مقدمة إلى برنامجsalmounNo ratings yet
- Electrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsDocument1 pageElectrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsSalih Ahmed ObeidNo ratings yet
- Grade 11-Term 1-Practical List N Instructions 21-22Document5 pagesGrade 11-Term 1-Practical List N Instructions 21-22AadyaNo ratings yet
- Measuring Paved Surface Frictional Properties Using The Dynamic Friction TesterDocument5 pagesMeasuring Paved Surface Frictional Properties Using The Dynamic Friction TesterEric GozzerNo ratings yet
- Experimental Metrological Investigations To Measure Thickness Reduction of Vanes at Inaccessible Regions of CastingsDocument8 pagesExperimental Metrological Investigations To Measure Thickness Reduction of Vanes at Inaccessible Regions of CastingsJohn Vivian Prashant jp7vivianNo ratings yet