Download as pdf or txt
You might also like
- Galois Theory 4th Stewart Solution ManualDocument9 pagesGalois Theory 4th Stewart Solution ManualAndrea Maxcy100% (34)
- Pure Birth Process PDFDocument7 pagesPure Birth Process PDFKIRAN DUBEYNo ratings yet
- Solutions To Assignment 4 PDFDocument11 pagesSolutions To Assignment 4 PDFVirajitha MaddumabandaraNo ratings yet
- Citizen M16Document64 pagesCitizen M16Favoreel Patrick100% (1)
- Iris Scanning Seminar ReportDocument39 pagesIris Scanning Seminar ReportDinesh Atun Reddy100% (1)
- Actuarial Notation: AnnuitiesDocument12 pagesActuarial Notation: AnnuitiesCallum Thain BlackNo ratings yet
- ACE The LSAT Logic GamesDocument41 pagesACE The LSAT Logic GamesLawschoolprep100% (9)
- Geometry Ch.1 Unit PlanDocument3 pagesGeometry Ch.1 Unit Planmelissaw12No ratings yet
- Solutions Ht2009Document6 pagesSolutions Ht2009Kibet ElishaNo ratings yet
- Chapter02 03 SJDocument5 pagesChapter02 03 SJkaviNo ratings yet
- Assn1 M146CDocument8 pagesAssn1 M146CRaymondSanchezNo ratings yet
- On The Sign of The Green's Function Associated To Hill's Equation With An Indefinite PotentialDocument11 pagesOn The Sign of The Green's Function Associated To Hill's Equation With An Indefinite PotentialFran Heyderman Estupiñan SinisterraNo ratings yet
- Parte 10Document7 pagesParte 10Elohim Ortiz CaballeroNo ratings yet
- Note7 8Document17 pagesNote7 8Nancy QNo ratings yet
- HW 8 SolutionDocument10 pagesHW 8 SolutionRotem CalisirNo ratings yet
- HW2 SolutionDocument7 pagesHW2 SolutionDevaraj SubrmanayamNo ratings yet
- Laplace PDFDocument59 pagesLaplace PDFsygwapoooNo ratings yet
- E9-211 Oct2019-Mid SolutionsDocument3 pagesE9-211 Oct2019-Mid SolutionsRajbeer SinghNo ratings yet
- LBSEconometricsPartIIpdf Time SeriesDocument246 pagesLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacNo ratings yet
- 8 Periodic Linear Di Erential Equations - Floquet TheoryDocument5 pages8 Periodic Linear Di Erential Equations - Floquet Theorycanoninha2No ratings yet
- Week 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDocument6 pagesWeek 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDeepjyoti MajumderNo ratings yet
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- Polynomial Root Motion: Christopher Frayer and James A. SwensonDocument6 pagesPolynomial Root Motion: Christopher Frayer and James A. SwensonMarie.NgoNo ratings yet
- Lecture FloquetDocument4 pagesLecture FloquetSaid SaidNo ratings yet
- Feb 24 - Linear Transformation QuestionsDocument3 pagesFeb 24 - Linear Transformation QuestionsparshotamNo ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- ch11 SPDocument12 pagesch11 SPKanchan JainNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- Considerations On Finite and Fixed Time ConvergenceDocument4 pagesConsiderations On Finite and Fixed Time ConvergenceAntonio EstradaNo ratings yet
- Basic Theory of Nonlinear Third-Order Q-DifferenceDocument14 pagesBasic Theory of Nonlinear Third-Order Q-DifferenceTomas Bavestrello GilNo ratings yet
- MA1512 Tutorial 5 SolutionsDocument7 pagesMA1512 Tutorial 5 SolutionsWeiyen NgNo ratings yet
- Special FunDocument10 pagesSpecial FunJHNo ratings yet
- 117Document11 pages117Mohammad Imran ShafiNo ratings yet
- Kernel-Based Portfolio Management ModelDocument8 pagesKernel-Based Portfolio Management ModelvidmantoNo ratings yet
- Long Time Behavior of Infinite Harmonic Chain With L Initial ConditionsDocument22 pagesLong Time Behavior of Infinite Harmonic Chain With L Initial ConditionsOng JooHomNo ratings yet
- EC331 M1 SolutionDocument2 pagesEC331 M1 SolutionBushra MamoudNo ratings yet
- Chapter 3 - Lecture NotesDocument20 pagesChapter 3 - Lecture NotesJoel Tan Yi JieNo ratings yet
- Lorentz AttractorDocument15 pagesLorentz AttractorDavid BrantleyNo ratings yet
- Periodic Solutions of Nonautonomous Ordinary Differential EquationsDocument18 pagesPeriodic Solutions of Nonautonomous Ordinary Differential EquationsAntonio Torres PeñaNo ratings yet
- L Evy Processes in Finance: A Remedy To The Non-Stationarity of Continuous MartingalesDocument10 pagesL Evy Processes in Finance: A Remedy To The Non-Stationarity of Continuous Martingalesalste7806412No ratings yet
- E y X y e y X X: Differential Equations '15 - FinalDocument3 pagesE y X y e y X X: Differential Equations '15 - Final陳浚維No ratings yet
- PCweek5 2015Document10 pagesPCweek5 2015Roy VeseyNo ratings yet
- Problem Set 5 SolutionsDocument2 pagesProblem Set 5 SolutionsMengyao MaNo ratings yet
- Existence and Regularity of Periodic Solutions To Certain First-Order Partial Differential EquationsDocument24 pagesExistence and Regularity of Periodic Solutions To Certain First-Order Partial Differential EquationsAlex TedescoNo ratings yet
- Wwwwrtyyu FGDHDocument25 pagesWwwwrtyyu FGDHSaad KhNo ratings yet
- HW 3Document5 pagesHW 3TaduxNo ratings yet
- Oscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermDocument10 pagesOscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermRobin Achmad KurenaiNo ratings yet
- Lecture 8 DUDLEY'S INTEGRAL INEQUALITYDocument7 pagesLecture 8 DUDLEY'S INTEGRAL INEQUALITYBoul chandra GaraiNo ratings yet
- Conduction SteadyDocument12 pagesConduction SteadyRafi Mahmoud SulaimanNo ratings yet
- M340project Sacco MaddenDocument6 pagesM340project Sacco MaddenDavid SaccoNo ratings yet
- Math207 HW3Document2 pagesMath207 HW3PramodNo ratings yet
- Assignment 3Document2 pagesAssignment 3Ravindra ShettyNo ratings yet
- 6 Transform-Domain Approaches: 6.1 MotivationDocument46 pages6 Transform-Domain Approaches: 6.1 MotivationCHARLES MATHEWNo ratings yet
- TelegrphDocument4 pagesTelegrphimohammadghiyasiNo ratings yet
- Lecture 1Document60 pagesLecture 1katerinneNo ratings yet
- Sullivan 8Document6 pagesSullivan 8Satyaki BhattacharyaNo ratings yet
- Bardaro 2012Document17 pagesBardaro 2012beharNo ratings yet
- Results About Heat EquationsDocument7 pagesResults About Heat EquationsAdi SubbuNo ratings yet
- Random Process in Analog Communication SystemsDocument91 pagesRandom Process in Analog Communication SystemsEkaveera Gouribhatla100% (1)
- Solutions To Assignment 4Document11 pagesSolutions To Assignment 4Sandeep SajuNo ratings yet
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Class Discusion DsamplindistnDocument2 pagesClass Discusion DsamplindistnGizaw Belay100% (1)
- Horizontal Design - Overview: Slew Create or Modify Track Horizontal Track Design Slew AnalysisDocument16 pagesHorizontal Design - Overview: Slew Create or Modify Track Horizontal Track Design Slew AnalysisReepak GuptaNo ratings yet
- Problem Solving and Reasoning - Polya's Problem Solving StrategyDocument22 pagesProblem Solving and Reasoning - Polya's Problem Solving Strategymisssunshine112No ratings yet
- Solving Cubic EquationsDocument7 pagesSolving Cubic EquationsMandar KulkarniNo ratings yet
- Propositional-Predicate CalculusDocument53 pagesPropositional-Predicate CalculusHarsh DarukaNo ratings yet
- 도로설계기준, 2016Document332 pages도로설계기준, 2016suni soonNo ratings yet
- Assignment 1 Stock Market AnalysisDocument10 pagesAssignment 1 Stock Market AnalysisThái TriệuNo ratings yet
- Review For Final ExamDocument9 pagesReview For Final ExamAceNo ratings yet
- Area Perimeter Task CardsDocument5 pagesArea Perimeter Task Cardsapi-347809438100% (1)
- MTH - 209 Lecture NoteDocument48 pagesMTH - 209 Lecture NoteTochukwupa Preize0% (1)
- Notes in LogicDocument10 pagesNotes in LogicJoseph De Villa BobadillaNo ratings yet
- Pressure Recovery in A Centrifugal Blower CasingDocument7 pagesPressure Recovery in A Centrifugal Blower CasingBensinghdhasNo ratings yet
- K - Random Walk Heat Equation DerivationDocument4 pagesK - Random Walk Heat Equation DerivationdecvsdsdfeNo ratings yet
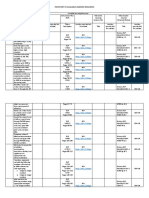
- Inventory of Available Learning Resources: ST THDocument9 pagesInventory of Available Learning Resources: ST THArnold C ZenarosaNo ratings yet
- Analysis of Time SeriesDocument32 pagesAnalysis of Time SeriesAnika KumarNo ratings yet
- Classification and Clustering: CS109/Stat121/AC209/E-109 Data ScienceDocument28 pagesClassification and Clustering: CS109/Stat121/AC209/E-109 Data ScienceMatheus SilvaNo ratings yet
- Algebra 1 Summer PacketDocument8 pagesAlgebra 1 Summer PacketSaida Mtz GNo ratings yet
- Petrochemicals Planning.Document12 pagesPetrochemicals Planning.vasucristalNo ratings yet
- Handout 7: MonopolyDocument8 pagesHandout 7: MonopolyRaulNo ratings yet
- Critical Section Service by A Preemptive ModelDocument17 pagesCritical Section Service by A Preemptive Modeldugguz100% (1)
- Icons at The Interface - Their UsefulnessDocument13 pagesIcons at The Interface - Their Usefulnesseluzapinheiro6883No ratings yet
- International Journals Call For Paper HTTP://WWW - Iiste.org/journalsDocument12 pagesInternational Journals Call For Paper HTTP://WWW - Iiste.org/journalsAlexander DeckerNo ratings yet
- Dishonest:: (Aggarwal Exm-18)Document15 pagesDishonest:: (Aggarwal Exm-18)Md.Ashiq IqbalNo ratings yet
- 2020-2021 Graduate Calendar: Description DateDocument8 pages2020-2021 Graduate Calendar: Description Datekarim alamiNo ratings yet