
Robot Companies
Robot Companies
You might also like
- Testing & Commissioning Certificate For SPRKDocument2 pagesTesting & Commissioning Certificate For SPRKgururaj100% (3)
- F Secure Tending To The Red ForestDocument30 pagesF Secure Tending To The Red ForestMohammed MojoNo ratings yet
- Welding and CuttingDocument64 pagesWelding and CuttingScott TrainorNo ratings yet
- Huawei Ape4517r0 (Penta Band)Document2 pagesHuawei Ape4517r0 (Penta Band)Mehdi Esmayly100% (4)
- The Vanity of Arts and SciencesDocument403 pagesThe Vanity of Arts and SciencesAndre SetteNo ratings yet
- S) Agencies of The Argentine National StateDocument3 pagesS) Agencies of The Argentine National StateScribdTranslationsNo ratings yet
- AnimacionDocument30 pagesAnimacionAngie Natalia DiazNo ratings yet
- Vivek Murthy - Work and The Loneliness EpidemicDocument24 pagesVivek Murthy - Work and The Loneliness EpidemicMONEY MINDED MILLENNIALNo ratings yet
- Buena RevistaDocument1 pageBuena Revistaluislopez1234No ratings yet
- Chile Mining: Expomin Official Investment GuideDocument41 pagesChile Mining: Expomin Official Investment GuideVictor ValeNo ratings yet
- Excellence: R CS EaDocument35 pagesExcellence: R CS EakokuyNo ratings yet
- Brochure Marketeers HangoutDocument1 pageBrochure Marketeers HangoutJP PhoneNo ratings yet
- Patentes KoolhaasDocument14 pagesPatentes KoolhaasJuan SebastianNo ratings yet
- Escape Studios Industry Beginner-S Guide 2022 2022Document14 pagesEscape Studios Industry Beginner-S Guide 2022 2022sasca.scarNo ratings yet
- Big DataDocument171 pagesBig DataMarek ZimnakNo ratings yet
- Zygomatico-Maxillary OsteotomyDocument8 pagesZygomatico-Maxillary Osteotomypratiksha malhotraNo ratings yet
- CE Apr 16 PDFDocument84 pagesCE Apr 16 PDFNGNo ratings yet
- Mag GTI Issue 2018-3Document100 pagesMag GTI Issue 2018-3Philo ApNo ratings yet
- Semi-Final and Final Round ProblemDocument4 pagesSemi-Final and Final Round ProblemShruti MehtaNo ratings yet
- INGLÉSDocument3 pagesINGLÉSMarcelo TorresNo ratings yet
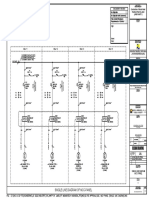
- 02C. Mcc-Panel (Single Line Diagram)Document11 pages02C. Mcc-Panel (Single Line Diagram)Media RaharjaNo ratings yet
- Project Management GuideDocument16 pagesProject Management Guideaaryanfernandes6No ratings yet
- Organigrama MMAYADocument1 pageOrganigrama MMAYALuis HinojosaNo ratings yet
- Mapa 2BDocument2 pagesMapa 2Bmc9934871No ratings yet
- Semana 01 - Basics ConceptsDocument21 pagesSemana 01 - Basics ConceptsANYELA LISETH CCOPA YLLANESNo ratings yet
- CatalogDocument60 pagesCatalogRonnie LiewNo ratings yet
- Performance MonitoringDocument60 pagesPerformance MonitoringManoj Kumar PanigrahyNo ratings yet
- Performance Measurement For ProjectsDocument60 pagesPerformance Measurement For ProjectsMaria HerreraNo ratings yet
- Srishti Profile Architect C.p.chawlaDocument18 pagesSrishti Profile Architect C.p.chawlaChandra Prakash ChawlaNo ratings yet
- IMANEE 2018 Conference ProgrammeDocument36 pagesIMANEE 2018 Conference ProgrammeirinaNo ratings yet
- Department of The Army Technical Manual: Telescope, Observation M49 W/E (6650-530-0960)Document34 pagesDepartment of The Army Technical Manual: Telescope, Observation M49 W/E (6650-530-0960)SteveNo ratings yet
- Is BN 9789514262371Document88 pagesIs BN 9789514262371Muhammad Afif RahmanNo ratings yet
- Mind MapDocument1 pageMind MapRumbling QueenNo ratings yet
- AngelopuloGCBar 2013 SectionAIntroductionT IntegratedOrganisatioDocument2 pagesAngelopuloGCBar 2013 SectionAIntroductionT IntegratedOrganisatiolungilekhoza114No ratings yet
- A New World Map in Textiles and ClothingDocument237 pagesA New World Map in Textiles and ClothingImran IqbalNo ratings yet
- AFEE HandbookDocument160 pagesAFEE HandbookLuz VargasNo ratings yet
- Dokumen - Tips The New Brand Landscape 2Document66 pagesDokumen - Tips The New Brand Landscape 2fitara embunNo ratings yet
- Cape Fear River - Crash ReportDocument4 pagesCape Fear River - Crash ReportJohanna Ferebee StillNo ratings yet
- Detailed Design: Plazhi Ish Uzina Sodes NarteDocument1 pageDetailed Design: Plazhi Ish Uzina Sodes NarteAlban HysomemajNo ratings yet
- Monthly Report of Cases: Noveleta Cavite Region IV October 2010Document6 pagesMonthly Report of Cases: Noveleta Cavite Region IV October 2010Joy ParasNo ratings yet
- aPP fORMDocument1 pageaPP fORMMark Roger Huberit IINo ratings yet
- Serengeti Media Report July 28-Final VersionDocument8 pagesSerengeti Media Report July 28-Final VersionECONOMYTICKERNo ratings yet
- Vanish Magic Magazine Morgan Strebler EditionDocument250 pagesVanish Magic Magazine Morgan Strebler EditionMarcelo Jorge Abel rossi100% (3)
- Itr 1-2019 GB PDFDocument8 pagesItr 1-2019 GB PDFAlexNo ratings yet
- CGPPDocument173 pagesCGPPLynn ThetNo ratings yet
- Acfrogcdtxyd2pxju5at Bhuefelguczf1 8kx547l3 Gtczdlqkny9ej0 Ye0f17dznwzi3iblefaqgbd3kvbduseduhsz74gt8t7cxczwq9pzu0pqa3wsfgxkdrm8Document1 pageAcfrogcdtxyd2pxju5at Bhuefelguczf1 8kx547l3 Gtczdlqkny9ej0 Ye0f17dznwzi3iblefaqgbd3kvbduseduhsz74gt8t7cxczwq9pzu0pqa3wsfgxkdrm8r100% (1)
- Format Bap Par AlfamartDocument1 pageFormat Bap Par Alfamartمصباح المنيرNo ratings yet
- 'Kampoong in The Air' The PresentationDocument8 pages'Kampoong in The Air' The PresentationEdy SubangkitNo ratings yet
- MKWD Annual Procurement Plan 2019Document34 pagesMKWD Annual Procurement Plan 2019Roland AnaumNo ratings yet
- Project Submission of Internal Atkt Oct 2022Document18 pagesProject Submission of Internal Atkt Oct 2022vinit tandelNo ratings yet
- Preliminary Round ADocument4 pagesPreliminary Round AShruti MehtaNo ratings yet
- Organigrama MINTURDocument1 pageOrganigrama MINTURSilvia NavaresNo ratings yet
- Perspective: Location Plan Site Development PlanDocument1 pagePerspective: Location Plan Site Development PlannfuriscalNo ratings yet
- Board PosterDocument1 pageBoard PosterEmilda IzhnyNo ratings yet
- BAI DomainsOfBusinessAgility BookDocument79 pagesBAI DomainsOfBusinessAgility BookHudson MartinsNo ratings yet
- Volumen de TraficoDocument59 pagesVolumen de TraficoGustavo Carlos Gomez C.No ratings yet
- Macro Fall2015 SOLUTIONDocument4 pagesMacro Fall2015 SOLUTIONAhmed KharratNo ratings yet
- Webinar OKR 3 Sep 2020Document59 pagesWebinar OKR 3 Sep 2020FajriRamadhan100% (1)
- LE10s ARM 5858938-1EN-Rev3Document343 pagesLE10s ARM 5858938-1EN-Rev3The LamNo ratings yet
- Disha Publication Practice Sets For RRB Junior Engineer Mechanical Allied Engineering Stage II Exam. CB1198675309Document18 pagesDisha Publication Practice Sets For RRB Junior Engineer Mechanical Allied Engineering Stage II Exam. CB1198675309anilNo ratings yet
- BSC H Computer ScienceDocument209 pagesBSC H Computer ScienceSmNo ratings yet
- Cybersecurity Maturity Model Certification (CMMC) : Version 1.0 - January 30, 2020Document28 pagesCybersecurity Maturity Model Certification (CMMC) : Version 1.0 - January 30, 2020肖翔100% (1)
- A.Nisansala Weeraperuma ResumeDocument1 pageA.Nisansala Weeraperuma Resumenisansaladilshani8No ratings yet
- KGP-931D: Differential GPS NAVIGATORDocument2 pagesKGP-931D: Differential GPS NAVIGATORueg liepajaNo ratings yet
- CSPGCLDocument30 pagesCSPGCLRobinn TiggaNo ratings yet
- Feederless-SFP-DC Cables-Flexi Multiradio Base Station Installation Site Requirements PDFDocument15 pagesFeederless-SFP-DC Cables-Flexi Multiradio Base Station Installation Site Requirements PDFFlorin StanNo ratings yet
- OSPF Exercise2Document1 pageOSPF Exercise2Nikhilesh Prabhakar100% (1)
- Solution Guide For SAP Sales CloudDocument1,224 pagesSolution Guide For SAP Sales CloudMarlos Augustus Maciel DamascenoNo ratings yet
- What Is A Project? - Definition and Key CharacteristicsDocument6 pagesWhat Is A Project? - Definition and Key Characteristicschandan kumarNo ratings yet
- SPM 1200l5a 1Document1 pageSPM 1200l5a 1Mohamed DaHaBNo ratings yet
- Individual Assignment Ib1704 Phuong Oanh Sa160135Document14 pagesIndividual Assignment Ib1704 Phuong Oanh Sa160135Hoa PhươngNo ratings yet
- Cs8491 Computer Architecture Unit - 2: Ans: ADocument8 pagesCs8491 Computer Architecture Unit - 2: Ans: AASIF MNo ratings yet
- Chandrayaan 3 WikipediaDocument1 pageChandrayaan 3 WikipediaOm prakash singhNo ratings yet
- Soal Ujian Sekolah Bahasa Inggris Kelas XII Tahun 2023.docx 20240318 145912 0000Document14 pagesSoal Ujian Sekolah Bahasa Inggris Kelas XII Tahun 2023.docx 20240318 145912 0000leenicholas492No ratings yet
- Redp 5711Document156 pagesRedp 5711democraciacensuradaNo ratings yet
- Rec ColumnDocument2 pagesRec Columnnirmal sutharNo ratings yet
- "Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodDocument6 pages"Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodAnonymous e7Rajar9SwNo ratings yet
- CDX MP40Document54 pagesCDX MP40scribduser1979No ratings yet
- Spare Parts ManagementDocument24 pagesSpare Parts ManagementHassan ShafiqueNo ratings yet
- Sriharshini InternshipDocument12 pagesSriharshini InternshipSriharshini 158No ratings yet
- Manual Visiometro Optec-1000Document26 pagesManual Visiometro Optec-1000Leydi Johana Guerra SuazaNo ratings yet
- ACMS Local Church ManualDocument61 pagesACMS Local Church ManualDiogo Francisco100% (1)
- LEARNING UNIT 1 KamaliDocument61 pagesLEARNING UNIT 1 Kamalimigishadieumerci1No ratings yet
- F P A I: Chapter 5 (Cont.)Document17 pagesF P A I: Chapter 5 (Cont.)hassan IQNo ratings yet
- 03 - Quality Management SystemDocument12 pages03 - Quality Management SystemCharlon Adrian RuizNo ratings yet






















































































Download as pdf or txt
You might also like
- Testing & Commissioning Certificate For SPRKDocument2 pagesTesting & Commissioning Certificate For SPRKgururaj100% (3)
- F Secure Tending To The Red ForestDocument30 pagesF Secure Tending To The Red ForestMohammed MojoNo ratings yet
- Welding and CuttingDocument64 pagesWelding and CuttingScott TrainorNo ratings yet
- Huawei Ape4517r0 (Penta Band)Document2 pagesHuawei Ape4517r0 (Penta Band)Mehdi Esmayly100% (4)
- The Vanity of Arts and SciencesDocument403 pagesThe Vanity of Arts and SciencesAndre SetteNo ratings yet
- S) Agencies of The Argentine National StateDocument3 pagesS) Agencies of The Argentine National StateScribdTranslationsNo ratings yet
- AnimacionDocument30 pagesAnimacionAngie Natalia DiazNo ratings yet
- Vivek Murthy - Work and The Loneliness EpidemicDocument24 pagesVivek Murthy - Work and The Loneliness EpidemicMONEY MINDED MILLENNIALNo ratings yet
- Buena RevistaDocument1 pageBuena Revistaluislopez1234No ratings yet
- Chile Mining: Expomin Official Investment GuideDocument41 pagesChile Mining: Expomin Official Investment GuideVictor ValeNo ratings yet
- Excellence: R CS EaDocument35 pagesExcellence: R CS EakokuyNo ratings yet
- Brochure Marketeers HangoutDocument1 pageBrochure Marketeers HangoutJP PhoneNo ratings yet
- Patentes KoolhaasDocument14 pagesPatentes KoolhaasJuan SebastianNo ratings yet
- Escape Studios Industry Beginner-S Guide 2022 2022Document14 pagesEscape Studios Industry Beginner-S Guide 2022 2022sasca.scarNo ratings yet
- Big DataDocument171 pagesBig DataMarek ZimnakNo ratings yet
- Zygomatico-Maxillary OsteotomyDocument8 pagesZygomatico-Maxillary Osteotomypratiksha malhotraNo ratings yet
- CE Apr 16 PDFDocument84 pagesCE Apr 16 PDFNGNo ratings yet
- Mag GTI Issue 2018-3Document100 pagesMag GTI Issue 2018-3Philo ApNo ratings yet
- Semi-Final and Final Round ProblemDocument4 pagesSemi-Final and Final Round ProblemShruti MehtaNo ratings yet
- INGLÉSDocument3 pagesINGLÉSMarcelo TorresNo ratings yet
- 02C. Mcc-Panel (Single Line Diagram)Document11 pages02C. Mcc-Panel (Single Line Diagram)Media RaharjaNo ratings yet
- Project Management GuideDocument16 pagesProject Management Guideaaryanfernandes6No ratings yet
- Organigrama MMAYADocument1 pageOrganigrama MMAYALuis HinojosaNo ratings yet
- Mapa 2BDocument2 pagesMapa 2Bmc9934871No ratings yet
- Semana 01 - Basics ConceptsDocument21 pagesSemana 01 - Basics ConceptsANYELA LISETH CCOPA YLLANESNo ratings yet
- CatalogDocument60 pagesCatalogRonnie LiewNo ratings yet
- Performance MonitoringDocument60 pagesPerformance MonitoringManoj Kumar PanigrahyNo ratings yet
- Performance Measurement For ProjectsDocument60 pagesPerformance Measurement For ProjectsMaria HerreraNo ratings yet
- Srishti Profile Architect C.p.chawlaDocument18 pagesSrishti Profile Architect C.p.chawlaChandra Prakash ChawlaNo ratings yet
- IMANEE 2018 Conference ProgrammeDocument36 pagesIMANEE 2018 Conference ProgrammeirinaNo ratings yet
- Department of The Army Technical Manual: Telescope, Observation M49 W/E (6650-530-0960)Document34 pagesDepartment of The Army Technical Manual: Telescope, Observation M49 W/E (6650-530-0960)SteveNo ratings yet
- Is BN 9789514262371Document88 pagesIs BN 9789514262371Muhammad Afif RahmanNo ratings yet
- Mind MapDocument1 pageMind MapRumbling QueenNo ratings yet
- AngelopuloGCBar 2013 SectionAIntroductionT IntegratedOrganisatioDocument2 pagesAngelopuloGCBar 2013 SectionAIntroductionT IntegratedOrganisatiolungilekhoza114No ratings yet
- A New World Map in Textiles and ClothingDocument237 pagesA New World Map in Textiles and ClothingImran IqbalNo ratings yet
- AFEE HandbookDocument160 pagesAFEE HandbookLuz VargasNo ratings yet
- Dokumen - Tips The New Brand Landscape 2Document66 pagesDokumen - Tips The New Brand Landscape 2fitara embunNo ratings yet
- Cape Fear River - Crash ReportDocument4 pagesCape Fear River - Crash ReportJohanna Ferebee StillNo ratings yet
- Detailed Design: Plazhi Ish Uzina Sodes NarteDocument1 pageDetailed Design: Plazhi Ish Uzina Sodes NarteAlban HysomemajNo ratings yet
- Monthly Report of Cases: Noveleta Cavite Region IV October 2010Document6 pagesMonthly Report of Cases: Noveleta Cavite Region IV October 2010Joy ParasNo ratings yet
- aPP fORMDocument1 pageaPP fORMMark Roger Huberit IINo ratings yet
- Serengeti Media Report July 28-Final VersionDocument8 pagesSerengeti Media Report July 28-Final VersionECONOMYTICKERNo ratings yet
- Vanish Magic Magazine Morgan Strebler EditionDocument250 pagesVanish Magic Magazine Morgan Strebler EditionMarcelo Jorge Abel rossi100% (3)
- Itr 1-2019 GB PDFDocument8 pagesItr 1-2019 GB PDFAlexNo ratings yet
- CGPPDocument173 pagesCGPPLynn ThetNo ratings yet
- Acfrogcdtxyd2pxju5at Bhuefelguczf1 8kx547l3 Gtczdlqkny9ej0 Ye0f17dznwzi3iblefaqgbd3kvbduseduhsz74gt8t7cxczwq9pzu0pqa3wsfgxkdrm8Document1 pageAcfrogcdtxyd2pxju5at Bhuefelguczf1 8kx547l3 Gtczdlqkny9ej0 Ye0f17dznwzi3iblefaqgbd3kvbduseduhsz74gt8t7cxczwq9pzu0pqa3wsfgxkdrm8r100% (1)
- Format Bap Par AlfamartDocument1 pageFormat Bap Par Alfamartمصباح المنيرNo ratings yet
- 'Kampoong in The Air' The PresentationDocument8 pages'Kampoong in The Air' The PresentationEdy SubangkitNo ratings yet
- MKWD Annual Procurement Plan 2019Document34 pagesMKWD Annual Procurement Plan 2019Roland AnaumNo ratings yet
- Project Submission of Internal Atkt Oct 2022Document18 pagesProject Submission of Internal Atkt Oct 2022vinit tandelNo ratings yet
- Preliminary Round ADocument4 pagesPreliminary Round AShruti MehtaNo ratings yet
- Organigrama MINTURDocument1 pageOrganigrama MINTURSilvia NavaresNo ratings yet
- Perspective: Location Plan Site Development PlanDocument1 pagePerspective: Location Plan Site Development PlannfuriscalNo ratings yet
- Board PosterDocument1 pageBoard PosterEmilda IzhnyNo ratings yet
- BAI DomainsOfBusinessAgility BookDocument79 pagesBAI DomainsOfBusinessAgility BookHudson MartinsNo ratings yet
- Volumen de TraficoDocument59 pagesVolumen de TraficoGustavo Carlos Gomez C.No ratings yet
- Macro Fall2015 SOLUTIONDocument4 pagesMacro Fall2015 SOLUTIONAhmed KharratNo ratings yet
- Webinar OKR 3 Sep 2020Document59 pagesWebinar OKR 3 Sep 2020FajriRamadhan100% (1)
- LE10s ARM 5858938-1EN-Rev3Document343 pagesLE10s ARM 5858938-1EN-Rev3The LamNo ratings yet
- Disha Publication Practice Sets For RRB Junior Engineer Mechanical Allied Engineering Stage II Exam. CB1198675309Document18 pagesDisha Publication Practice Sets For RRB Junior Engineer Mechanical Allied Engineering Stage II Exam. CB1198675309anilNo ratings yet
- BSC H Computer ScienceDocument209 pagesBSC H Computer ScienceSmNo ratings yet
- Cybersecurity Maturity Model Certification (CMMC) : Version 1.0 - January 30, 2020Document28 pagesCybersecurity Maturity Model Certification (CMMC) : Version 1.0 - January 30, 2020肖翔100% (1)
- A.Nisansala Weeraperuma ResumeDocument1 pageA.Nisansala Weeraperuma Resumenisansaladilshani8No ratings yet
- KGP-931D: Differential GPS NAVIGATORDocument2 pagesKGP-931D: Differential GPS NAVIGATORueg liepajaNo ratings yet
- CSPGCLDocument30 pagesCSPGCLRobinn TiggaNo ratings yet
- Feederless-SFP-DC Cables-Flexi Multiradio Base Station Installation Site Requirements PDFDocument15 pagesFeederless-SFP-DC Cables-Flexi Multiradio Base Station Installation Site Requirements PDFFlorin StanNo ratings yet
- OSPF Exercise2Document1 pageOSPF Exercise2Nikhilesh Prabhakar100% (1)
- Solution Guide For SAP Sales CloudDocument1,224 pagesSolution Guide For SAP Sales CloudMarlos Augustus Maciel DamascenoNo ratings yet
- What Is A Project? - Definition and Key CharacteristicsDocument6 pagesWhat Is A Project? - Definition and Key Characteristicschandan kumarNo ratings yet
- SPM 1200l5a 1Document1 pageSPM 1200l5a 1Mohamed DaHaBNo ratings yet
- Individual Assignment Ib1704 Phuong Oanh Sa160135Document14 pagesIndividual Assignment Ib1704 Phuong Oanh Sa160135Hoa PhươngNo ratings yet
- Cs8491 Computer Architecture Unit - 2: Ans: ADocument8 pagesCs8491 Computer Architecture Unit - 2: Ans: AASIF MNo ratings yet
- Chandrayaan 3 WikipediaDocument1 pageChandrayaan 3 WikipediaOm prakash singhNo ratings yet
- Soal Ujian Sekolah Bahasa Inggris Kelas XII Tahun 2023.docx 20240318 145912 0000Document14 pagesSoal Ujian Sekolah Bahasa Inggris Kelas XII Tahun 2023.docx 20240318 145912 0000leenicholas492No ratings yet
- Redp 5711Document156 pagesRedp 5711democraciacensuradaNo ratings yet
- Rec ColumnDocument2 pagesRec Columnnirmal sutharNo ratings yet
- "Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodDocument6 pages"Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodAnonymous e7Rajar9SwNo ratings yet
- CDX MP40Document54 pagesCDX MP40scribduser1979No ratings yet
- Spare Parts ManagementDocument24 pagesSpare Parts ManagementHassan ShafiqueNo ratings yet
- Sriharshini InternshipDocument12 pagesSriharshini InternshipSriharshini 158No ratings yet
- Manual Visiometro Optec-1000Document26 pagesManual Visiometro Optec-1000Leydi Johana Guerra SuazaNo ratings yet
- ACMS Local Church ManualDocument61 pagesACMS Local Church ManualDiogo Francisco100% (1)
- LEARNING UNIT 1 KamaliDocument61 pagesLEARNING UNIT 1 Kamalimigishadieumerci1No ratings yet
- F P A I: Chapter 5 (Cont.)Document17 pagesF P A I: Chapter 5 (Cont.)hassan IQNo ratings yet
- 03 - Quality Management SystemDocument12 pages03 - Quality Management SystemCharlon Adrian RuizNo ratings yet