
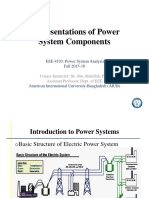
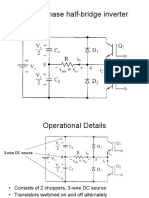
DC AC Converter
DC AC Converter
You might also like
- Pi-Bot V2.0 User ManualDocument110 pagesPi-Bot V2.0 User ManualMarcelo Carvalho100% (1)
- ELX303 Exam SolutionsDocument27 pagesELX303 Exam SolutionsNadeesha BandaraNo ratings yet
- Archemidian SolidsDocument22 pagesArchemidian Solidspositron999100% (1)
- Affidavit of Two Disinterested PersonsDocument1 pageAffidavit of Two Disinterested PersonsKim Grace PėqueNo ratings yet
- Outputs of Dairy FarmingDocument29 pagesOutputs of Dairy FarmingRamya RachelNo ratings yet
- Hafta1.compressedDocument28 pagesHafta1.compressedSersio BordiosNo ratings yet
- Unit 4 InvertersDocument86 pagesUnit 4 InvertersHaritha RkNo ratings yet
- MSC Rectifier CorrectedDocument53 pagesMSC Rectifier CorrectedashammoudaNo ratings yet
- 03 InverterDocument61 pages03 Inverterkamlesh jatNo ratings yet
- Dcac PDFDocument117 pagesDcac PDFLim EugeneNo ratings yet
- 15EC73 - PE - Mod 3 - QB - 12102019 PDFDocument35 pages15EC73 - PE - Mod 3 - QB - 12102019 PDFAishwaryaNo ratings yet
- Switch Mode InvertersDocument22 pagesSwitch Mode InvertersVivek SinghNo ratings yet
- Unit-4 InvertersDocument43 pagesUnit-4 InvertersbalafetNo ratings yet
- Transformer StudiesDocument52 pagesTransformer StudiesSyed JaveedNo ratings yet
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor life100% (1)
- EEE424 InverterV2Document82 pagesEEE424 InverterV2M.Feridun HızNo ratings yet
- Electrical-Engineering Engineering Power-Electronics Inverters NotesDocument22 pagesElectrical-Engineering Engineering Power-Electronics Inverters NotesAbdelrahman Magdy EbrahimNo ratings yet
- Unit 4 - CombinedDocument229 pagesUnit 4 - CombinedNINJANo ratings yet
- Lec 9Document27 pagesLec 9ahmed ragabNo ratings yet
- PEI Mod2@AzDOCUMENTS - inDocument68 pagesPEI Mod2@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- ACVC Material PDFDocument75 pagesACVC Material PDFramakrishnaprasad908No ratings yet
- Module-4-DC To AC Converters - ModDocument65 pagesModule-4-DC To AC Converters - Mod21je0095100% (1)
- Chopper Basic PDFDocument12 pagesChopper Basic PDFSoumya DuttaNo ratings yet
- Lesson No. 3 LectureDocument56 pagesLesson No. 3 LectureJay ZacariasNo ratings yet
- Module BuckDocument13 pagesModule BuckShankara BNo ratings yet
- 18ee53 Module 5Document33 pages18ee53 Module 5AshwiniNo ratings yet
- TransformerDocument52 pagesTransformerorangramaiNo ratings yet
- PE Lecture 9 TotDocument43 pagesPE Lecture 9 Totahmed el-sayedNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- EEE Lab ManualDocument26 pagesEEE Lab ManualPrabin RoyNo ratings yet
- Chapter 5 AC ConverterDocument27 pagesChapter 5 AC ConverterArjun KumarNo ratings yet
- Open Ended LabsDocument13 pagesOpen Ended LabsMuhammad ImadNo ratings yet
- 2 KNE223 Lecture Note 2 TransformerDocument52 pages2 KNE223 Lecture Note 2 TransformerZaid RafiqueNo ratings yet
- AC Voltage ControllerDocument6 pagesAC Voltage ControllerTuhin ShahNo ratings yet
- Chapter 4Document23 pagesChapter 4Arife AbdulkerimNo ratings yet
- VCO AnalysisDocument14 pagesVCO Analysiskok6100% (2)
- Controlled Rectifier Single Phase Full WaveDocument7 pagesControlled Rectifier Single Phase Full WaveJesus BecerraNo ratings yet
- AC-DC Converter - Single PhaseDocument16 pagesAC-DC Converter - Single Phasebishnu prasad muniNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- DC-AC ConverterDocument152 pagesDC-AC Converterads jokamNo ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- 8038Document22 pages8038narendramaharana39No ratings yet
- Unit4 EDCDocument15 pagesUnit4 EDCKarthick Sivakumar ChellamuthuNo ratings yet
- CHAPTER 2 TransformersDocument70 pagesCHAPTER 2 TransformersTom100% (1)
- Lecture Slide - Single Phase Transformer (Part I)Document24 pagesLecture Slide - Single Phase Transformer (Part I)plshamburger17No ratings yet
- 01 Representation of Power SystemDocument46 pages01 Representation of Power Systemবিবেক রত্নNo ratings yet
- Power ElectronicsDocument89 pagesPower Electronicsneelam sanjeev kumarNo ratings yet
- Single-Phase Half-Bridge InverterDocument29 pagesSingle-Phase Half-Bridge InverterSyed Ejaz Hussain AbidiNo ratings yet
- VFD BasicDocument44 pagesVFD Basicقلبي لربي حياهNo ratings yet
- Chapter4 TransDocument104 pagesChapter4 TransAbdul Shukor100% (1)
- 11 Chapter 3Document23 pages11 Chapter 3sathishNo ratings yet
- Chapter 2-1Document9 pagesChapter 2-1Tibebu Xibe TeNo ratings yet
- FALLSEM2012-13 CP0991 03-Aug-2012 RM01Document4 pagesFALLSEM2012-13 CP0991 03-Aug-2012 RM01Ankit BhattNo ratings yet
- Module 3-1Document11 pagesModule 3-1mrcarlo456No ratings yet
- Ilovepdf MergedDocument119 pagesIlovepdf MergedkushalNo ratings yet
- Unit 2 Converters (Half Controlled)Document52 pagesUnit 2 Converters (Half Controlled)Tenzin JamtshoNo ratings yet
- Chapter 5 - Ac To Ac ConverterDocument43 pagesChapter 5 - Ac To Ac Converterapolloroka100% (1)
- 12 CycloconvertersDocument16 pages12 CycloconvertersAbdallah LotfyNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Silicone RubberDocument13 pagesSilicone RubberPaikoNo ratings yet
- Polymers: Jiefeng Liu, Hanbo Zheng, Yiyi Zhang, Tianchun Zhou, Jie Zhao, Jiaqi Li, Jingqing Liu and Jichang LiDocument16 pagesPolymers: Jiefeng Liu, Hanbo Zheng, Yiyi Zhang, Tianchun Zhou, Jie Zhao, Jiaqi Li, Jingqing Liu and Jichang LiPaikoNo ratings yet
- Energies: Transformer Fault Diagnosis Model Based On Improved Gray Wolf Optimizer and Probabilistic Neural NetworkDocument21 pagesEnergies: Transformer Fault Diagnosis Model Based On Improved Gray Wolf Optimizer and Probabilistic Neural NetworkPaikoNo ratings yet
- Ac Substation Equipment Failure Report Nerc ComDocument51 pagesAc Substation Equipment Failure Report Nerc ComPaikoNo ratings yet
- 110 SP 20 HBL Battery Charger - Compress Pages 26Document1 page110 SP 20 HBL Battery Charger - Compress Pages 26PaikoNo ratings yet
- Brochure SRT 4955 - enDocument2 pagesBrochure SRT 4955 - enPaikoNo ratings yet
- X-Plane Installer LogDocument3 pagesX-Plane Installer LogMarsala NistoNo ratings yet
- Chemical Technology Subject Code: CH2001 Module II-Lecture 2 Urea ProductionDocument12 pagesChemical Technology Subject Code: CH2001 Module II-Lecture 2 Urea ProductionU SANKAR TEJONo ratings yet
- SH - Module 10 Lesson 8-LayersDocument52 pagesSH - Module 10 Lesson 8-LayersMine Cuevas Dela CruzNo ratings yet
- UPRM Ingenieria Mecanica Curriculo #1Document2 pagesUPRM Ingenieria Mecanica Curriculo #1Yosef DeleonNo ratings yet
- 6.334 Power Electronics: Mit OpencoursewareDocument4 pages6.334 Power Electronics: Mit OpencoursewareLocalized Prayer AppNo ratings yet
- 1 FffffanyDocument1 page1 FffffanyLuis SolisNo ratings yet
- Beef Feedlot Management GuideDocument38 pagesBeef Feedlot Management GuideHassan Ali Khalid100% (2)
- BSNL Complaint LetterDocument1 pageBSNL Complaint Lettershivi08No ratings yet
- D-5 Track Maintenance Activities - Part 4Document35 pagesD-5 Track Maintenance Activities - Part 4rajeshengasst89No ratings yet
- Final October Yojana 17-9 PDFDocument80 pagesFinal October Yojana 17-9 PDFsharadNo ratings yet
- DLL - Tle-He 6 - Q3 - W5Document5 pagesDLL - Tle-He 6 - Q3 - W5Jayjay Roniel100% (2)
- 17 March 2011 Case Study DiamondDocument7 pages17 March 2011 Case Study DiamondIonita AlexandruNo ratings yet
- PVM2700 Ag-GDocument122 pagesPVM2700 Ag-GAleLeNo ratings yet
- A. Technical MalversationDocument8 pagesA. Technical MalversationDinosaur Korean100% (1)
- 12.8 Reading+listeningDocument15 pages12.8 Reading+listeningPhạm Minh Trí VõNo ratings yet
- Mannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDocument20 pagesMannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDr. Muhammad Zaman ZahidNo ratings yet
- Chemistry and Technology of Rubber PDFDocument215 pagesChemistry and Technology of Rubber PDFCharlie CB Portner100% (1)
- Instruction Manual: MissionDocument93 pagesInstruction Manual: Missionamjad atayaNo ratings yet
- Astm A-285Document2 pagesAstm A-285LoriGalbanusNo ratings yet
- Definitive Guide To Security Awareness SuccessDocument19 pagesDefinitive Guide To Security Awareness SuccessRicardo RodríguezNo ratings yet
- Why Invest in RomaniaDocument21 pagesWhy Invest in RomaniaAlexandru Vlad CiocirlanNo ratings yet
- The Burma Code Vol-5Document465 pagesThe Burma Code Vol-5kerrypwlNo ratings yet
- HTW-1390 T5: Tunge Modeller Standard StatiskDocument6 pagesHTW-1390 T5: Tunge Modeller Standard StatiskjhonnyNo ratings yet
- Lirik LaguDocument38 pagesLirik LaguMuhammad tegar raihan 02No ratings yet
- Business Studies RevisionDocument2 pagesBusiness Studies RevisionSwapnil NaskarNo ratings yet
- Legal Hurdle in Gaming PaymentDocument9 pagesLegal Hurdle in Gaming Paymentanurag kumarNo ratings yet





























































































Download as pdf or txt
You might also like
- Pi-Bot V2.0 User ManualDocument110 pagesPi-Bot V2.0 User ManualMarcelo Carvalho100% (1)
- ELX303 Exam SolutionsDocument27 pagesELX303 Exam SolutionsNadeesha BandaraNo ratings yet
- Archemidian SolidsDocument22 pagesArchemidian Solidspositron999100% (1)
- Affidavit of Two Disinterested PersonsDocument1 pageAffidavit of Two Disinterested PersonsKim Grace PėqueNo ratings yet
- Outputs of Dairy FarmingDocument29 pagesOutputs of Dairy FarmingRamya RachelNo ratings yet
- Hafta1.compressedDocument28 pagesHafta1.compressedSersio BordiosNo ratings yet
- Unit 4 InvertersDocument86 pagesUnit 4 InvertersHaritha RkNo ratings yet
- MSC Rectifier CorrectedDocument53 pagesMSC Rectifier CorrectedashammoudaNo ratings yet
- 03 InverterDocument61 pages03 Inverterkamlesh jatNo ratings yet
- Dcac PDFDocument117 pagesDcac PDFLim EugeneNo ratings yet
- 15EC73 - PE - Mod 3 - QB - 12102019 PDFDocument35 pages15EC73 - PE - Mod 3 - QB - 12102019 PDFAishwaryaNo ratings yet
- Switch Mode InvertersDocument22 pagesSwitch Mode InvertersVivek SinghNo ratings yet
- Unit-4 InvertersDocument43 pagesUnit-4 InvertersbalafetNo ratings yet
- Transformer StudiesDocument52 pagesTransformer StudiesSyed JaveedNo ratings yet
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor life100% (1)
- EEE424 InverterV2Document82 pagesEEE424 InverterV2M.Feridun HızNo ratings yet
- Electrical-Engineering Engineering Power-Electronics Inverters NotesDocument22 pagesElectrical-Engineering Engineering Power-Electronics Inverters NotesAbdelrahman Magdy EbrahimNo ratings yet
- Unit 4 - CombinedDocument229 pagesUnit 4 - CombinedNINJANo ratings yet
- Lec 9Document27 pagesLec 9ahmed ragabNo ratings yet
- PEI Mod2@AzDOCUMENTS - inDocument68 pagesPEI Mod2@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- ACVC Material PDFDocument75 pagesACVC Material PDFramakrishnaprasad908No ratings yet
- Module-4-DC To AC Converters - ModDocument65 pagesModule-4-DC To AC Converters - Mod21je0095100% (1)
- Chopper Basic PDFDocument12 pagesChopper Basic PDFSoumya DuttaNo ratings yet
- Lesson No. 3 LectureDocument56 pagesLesson No. 3 LectureJay ZacariasNo ratings yet
- Module BuckDocument13 pagesModule BuckShankara BNo ratings yet
- 18ee53 Module 5Document33 pages18ee53 Module 5AshwiniNo ratings yet
- TransformerDocument52 pagesTransformerorangramaiNo ratings yet
- PE Lecture 9 TotDocument43 pagesPE Lecture 9 Totahmed el-sayedNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- EEE Lab ManualDocument26 pagesEEE Lab ManualPrabin RoyNo ratings yet
- Chapter 5 AC ConverterDocument27 pagesChapter 5 AC ConverterArjun KumarNo ratings yet
- Open Ended LabsDocument13 pagesOpen Ended LabsMuhammad ImadNo ratings yet
- 2 KNE223 Lecture Note 2 TransformerDocument52 pages2 KNE223 Lecture Note 2 TransformerZaid RafiqueNo ratings yet
- AC Voltage ControllerDocument6 pagesAC Voltage ControllerTuhin ShahNo ratings yet
- Chapter 4Document23 pagesChapter 4Arife AbdulkerimNo ratings yet
- VCO AnalysisDocument14 pagesVCO Analysiskok6100% (2)
- Controlled Rectifier Single Phase Full WaveDocument7 pagesControlled Rectifier Single Phase Full WaveJesus BecerraNo ratings yet
- AC-DC Converter - Single PhaseDocument16 pagesAC-DC Converter - Single Phasebishnu prasad muniNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- DC-AC ConverterDocument152 pagesDC-AC Converterads jokamNo ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- 8038Document22 pages8038narendramaharana39No ratings yet
- Unit4 EDCDocument15 pagesUnit4 EDCKarthick Sivakumar ChellamuthuNo ratings yet
- CHAPTER 2 TransformersDocument70 pagesCHAPTER 2 TransformersTom100% (1)
- Lecture Slide - Single Phase Transformer (Part I)Document24 pagesLecture Slide - Single Phase Transformer (Part I)plshamburger17No ratings yet
- 01 Representation of Power SystemDocument46 pages01 Representation of Power Systemবিবেক রত্নNo ratings yet
- Power ElectronicsDocument89 pagesPower Electronicsneelam sanjeev kumarNo ratings yet
- Single-Phase Half-Bridge InverterDocument29 pagesSingle-Phase Half-Bridge InverterSyed Ejaz Hussain AbidiNo ratings yet
- VFD BasicDocument44 pagesVFD Basicقلبي لربي حياهNo ratings yet
- Chapter4 TransDocument104 pagesChapter4 TransAbdul Shukor100% (1)
- 11 Chapter 3Document23 pages11 Chapter 3sathishNo ratings yet
- Chapter 2-1Document9 pagesChapter 2-1Tibebu Xibe TeNo ratings yet
- FALLSEM2012-13 CP0991 03-Aug-2012 RM01Document4 pagesFALLSEM2012-13 CP0991 03-Aug-2012 RM01Ankit BhattNo ratings yet
- Module 3-1Document11 pagesModule 3-1mrcarlo456No ratings yet
- Ilovepdf MergedDocument119 pagesIlovepdf MergedkushalNo ratings yet
- Unit 2 Converters (Half Controlled)Document52 pagesUnit 2 Converters (Half Controlled)Tenzin JamtshoNo ratings yet
- Chapter 5 - Ac To Ac ConverterDocument43 pagesChapter 5 - Ac To Ac Converterapolloroka100% (1)
- 12 CycloconvertersDocument16 pages12 CycloconvertersAbdallah LotfyNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Silicone RubberDocument13 pagesSilicone RubberPaikoNo ratings yet
- Polymers: Jiefeng Liu, Hanbo Zheng, Yiyi Zhang, Tianchun Zhou, Jie Zhao, Jiaqi Li, Jingqing Liu and Jichang LiDocument16 pagesPolymers: Jiefeng Liu, Hanbo Zheng, Yiyi Zhang, Tianchun Zhou, Jie Zhao, Jiaqi Li, Jingqing Liu and Jichang LiPaikoNo ratings yet
- Energies: Transformer Fault Diagnosis Model Based On Improved Gray Wolf Optimizer and Probabilistic Neural NetworkDocument21 pagesEnergies: Transformer Fault Diagnosis Model Based On Improved Gray Wolf Optimizer and Probabilistic Neural NetworkPaikoNo ratings yet
- Ac Substation Equipment Failure Report Nerc ComDocument51 pagesAc Substation Equipment Failure Report Nerc ComPaikoNo ratings yet
- 110 SP 20 HBL Battery Charger - Compress Pages 26Document1 page110 SP 20 HBL Battery Charger - Compress Pages 26PaikoNo ratings yet
- Brochure SRT 4955 - enDocument2 pagesBrochure SRT 4955 - enPaikoNo ratings yet
- X-Plane Installer LogDocument3 pagesX-Plane Installer LogMarsala NistoNo ratings yet
- Chemical Technology Subject Code: CH2001 Module II-Lecture 2 Urea ProductionDocument12 pagesChemical Technology Subject Code: CH2001 Module II-Lecture 2 Urea ProductionU SANKAR TEJONo ratings yet
- SH - Module 10 Lesson 8-LayersDocument52 pagesSH - Module 10 Lesson 8-LayersMine Cuevas Dela CruzNo ratings yet
- UPRM Ingenieria Mecanica Curriculo #1Document2 pagesUPRM Ingenieria Mecanica Curriculo #1Yosef DeleonNo ratings yet
- 6.334 Power Electronics: Mit OpencoursewareDocument4 pages6.334 Power Electronics: Mit OpencoursewareLocalized Prayer AppNo ratings yet
- 1 FffffanyDocument1 page1 FffffanyLuis SolisNo ratings yet
- Beef Feedlot Management GuideDocument38 pagesBeef Feedlot Management GuideHassan Ali Khalid100% (2)
- BSNL Complaint LetterDocument1 pageBSNL Complaint Lettershivi08No ratings yet
- D-5 Track Maintenance Activities - Part 4Document35 pagesD-5 Track Maintenance Activities - Part 4rajeshengasst89No ratings yet
- Final October Yojana 17-9 PDFDocument80 pagesFinal October Yojana 17-9 PDFsharadNo ratings yet
- DLL - Tle-He 6 - Q3 - W5Document5 pagesDLL - Tle-He 6 - Q3 - W5Jayjay Roniel100% (2)
- 17 March 2011 Case Study DiamondDocument7 pages17 March 2011 Case Study DiamondIonita AlexandruNo ratings yet
- PVM2700 Ag-GDocument122 pagesPVM2700 Ag-GAleLeNo ratings yet
- A. Technical MalversationDocument8 pagesA. Technical MalversationDinosaur Korean100% (1)
- 12.8 Reading+listeningDocument15 pages12.8 Reading+listeningPhạm Minh Trí VõNo ratings yet
- Mannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDocument20 pagesMannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDr. Muhammad Zaman ZahidNo ratings yet
- Chemistry and Technology of Rubber PDFDocument215 pagesChemistry and Technology of Rubber PDFCharlie CB Portner100% (1)
- Instruction Manual: MissionDocument93 pagesInstruction Manual: Missionamjad atayaNo ratings yet
- Astm A-285Document2 pagesAstm A-285LoriGalbanusNo ratings yet
- Definitive Guide To Security Awareness SuccessDocument19 pagesDefinitive Guide To Security Awareness SuccessRicardo RodríguezNo ratings yet
- Why Invest in RomaniaDocument21 pagesWhy Invest in RomaniaAlexandru Vlad CiocirlanNo ratings yet
- The Burma Code Vol-5Document465 pagesThe Burma Code Vol-5kerrypwlNo ratings yet
- HTW-1390 T5: Tunge Modeller Standard StatiskDocument6 pagesHTW-1390 T5: Tunge Modeller Standard StatiskjhonnyNo ratings yet
- Lirik LaguDocument38 pagesLirik LaguMuhammad tegar raihan 02No ratings yet
- Business Studies RevisionDocument2 pagesBusiness Studies RevisionSwapnil NaskarNo ratings yet
- Legal Hurdle in Gaming PaymentDocument9 pagesLegal Hurdle in Gaming Paymentanurag kumarNo ratings yet