
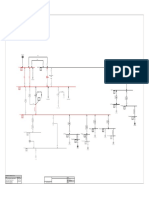
PowerSwing Parameter 68G
PowerSwing Parameter 68G
You might also like
- Spanish Verbs With PrepositionsDocument12 pagesSpanish Verbs With PrepositionsAmra-Refik Mujanovic100% (1)
- Elec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Document4 pagesElec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Filip ZubacNo ratings yet
- PowerSwing Parameter 68WDocument23 pagesPowerSwing Parameter 68WJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFM 2Document23 pagesPowerSwing Parameter F2PH GFM 2JIMENEZPSNo ratings yet
- PoleSlip78W GDocument88 pagesPoleSlip78W GJIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument26 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument86 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFL FallaDocument23 pagesPowerSwing Parameter F2PH GFL FallaJIMENEZPSNo ratings yet
- Importar Datos COMTRADE: Siemens 7Sj62Document35 pagesImportar Datos COMTRADE: Siemens 7Sj62JIMENEZPSNo ratings yet
- Picoblaze Interrupt Interface & Assembly Code Development: Ece 448 - Fpga and Asic Design With VHDLDocument25 pagesPicoblaze Interrupt Interface & Assembly Code Development: Ece 448 - Fpga and Asic Design With VHDLAnimesh SharmaNo ratings yet
- Regression VariousDocument17 pagesRegression VariousDennis Uygur AnderssonNo ratings yet
- Jfet Spice Data CTC 036 InterfetDocument16 pagesJfet Spice Data CTC 036 InterfetaudiosteveNo ratings yet
- Restrained Current Differential Relay Model: ... /3PHEXT - CFGDocument12 pagesRestrained Current Differential Relay Model: ... /3PHEXT - CFGramlijavierNo ratings yet
- Unit 2 Mcu PDFDocument12 pagesUnit 2 Mcu PDFatulNo ratings yet
- ARIMA Predict ForecastDocument1 pageARIMA Predict ForecastManoj MNo ratings yet
- Array Processors: SIMD Computer OrganizationDocument45 pagesArray Processors: SIMD Computer OrganizationArshad Matin100% (1)
- EIGRPv6 LabDocument8 pagesEIGRPv6 Labyokayo1994No ratings yet
- ANTES Y DESPUES LADO Sbb-Asw-00Document7 pagesANTES Y DESPUES LADO Sbb-Asw-00andryfloresotsNo ratings yet
- Flip Flop Problem 0Document12 pagesFlip Flop Problem 0Download UseNo ratings yet
- 6803 Instruction Set (68HC11 Subset)Document93 pages6803 Instruction Set (68HC11 Subset)Saukani HalimNo ratings yet
- Fmult/Accum: Low Resource Design ProposalDocument9 pagesFmult/Accum: Low Resource Design Proposalabhishek9126No ratings yet
- Task 02: Example of Analysing Data and Residual Volatility and Estimating ARCH and GARCH ModelsDocument12 pagesTask 02: Example of Analysing Data and Residual Volatility and Estimating ARCH and GARCH ModelsJustina SasnauskaiteNo ratings yet
- CiscoxalcatelDocument23 pagesCiscoxalcatelwell-rjNo ratings yet
- Commands CCNPDocument7 pagesCommands CCNPفخر العمايمNo ratings yet
- J7 PDFDocument10 pagesJ7 PDFManohar PNo ratings yet
- Labsheet Exp4Document6 pagesLabsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- Calling Procedure in ABAP Using ADBCDocument2 pagesCalling Procedure in ABAP Using ADBCvivianNo ratings yet
- Cmos Vlsi Design Lab 3: Controller Design and Verification: I. Aludec LogicDocument7 pagesCmos Vlsi Design Lab 3: Controller Design and Verification: I. Aludec LogicdrhammoudaNo ratings yet
- Load Flow AnalysisDocument15 pagesLoad Flow AnalysisMazo Ahmed ShiponNo ratings yet
- SeminarDocument29 pagesSeminarMohan UrsNo ratings yet
- BC420 - 46C - 013special MethodsDocument26 pagesBC420 - 46C - 013special MethodsmkumarshahiNo ratings yet
- 5.1 Bode Plots and Nichols ChartsDocument7 pages5.1 Bode Plots and Nichols ChartsMd. HarunNo ratings yet
- GAMS Result Example 16.2Document10 pagesGAMS Result Example 16.2teguhNo ratings yet
- Digital Logic Design: Register Transfer Specification & DesignDocument22 pagesDigital Logic Design: Register Transfer Specification & Designsunny louisNo ratings yet
- 18 LockfreeDocument51 pages18 Lockfreejsathy97No ratings yet
- Modelo - 2D Sat 01 - DebugDocument32 pagesModelo - 2D Sat 01 - DebugEmílioFariasVazNo ratings yet
- FormulaDocument4 pagesFormulamargaret_navaeiNo ratings yet
- 1) Pile Work: Total Amount Cost Per RFTDocument30 pages1) Pile Work: Total Amount Cost Per RFTbasum matNo ratings yet
- Clase 3 y 4 Econometria 2 (Autocorrelación) PDFDocument12 pagesClase 3 y 4 Econometria 2 (Autocorrelación) PDFTomas UrregoNo ratings yet
- Solutions RegressionTutorialDocument51 pagesSolutions RegressionTutorialARBIN RAJNo ratings yet
- C PDFDocument23 pagesC PDFTATATAHERNo ratings yet
- MC Trilinear Ej 1Document3 pagesMC Trilinear Ej 1Hernan David Florez OlivaresNo ratings yet
- MIPS32 Instruction Set Quick Reference: L B - F O J A B (N: O D S)Document2 pagesMIPS32 Instruction Set Quick Reference: L B - F O J A B (N: O D S)JayNo ratings yet
- Custom Single Purpose Processor DesignDocument24 pagesCustom Single Purpose Processor DesignAar Kay GautamNo ratings yet
- LAB 7 Report: Course Title: Control SystemsDocument5 pagesLAB 7 Report: Course Title: Control SystemsTajdar HaiderNo ratings yet
- Arco de Doble Radio CIV-201 PDFDocument6 pagesArco de Doble Radio CIV-201 PDFWara Jhosmara RiosNo ratings yet
- 3EJ4 Set 07 Mixed Signal MJDDocument45 pages3EJ4 Set 07 Mixed Signal MJDSoroush AkNo ratings yet
- Parameter CalculationDocument10 pagesParameter CalculationSANJIDA AKTERNo ratings yet
- IAC Curves: T, I, Is or T CalculationDocument5 pagesIAC Curves: T, I, Is or T CalculationAnonymous sLRlLluNo ratings yet
- MSP430 Instruction SetDocument9 pagesMSP430 Instruction Setnyana87No ratings yet
- Distancia VS SiemensDocument11 pagesDistancia VS SiemensJIMENEZPSNo ratings yet
- Cia 1.2Document4 pagesCia 1.2Neha AyyagariNo ratings yet
- SACD (RCDC) - Release Note - 09.02.00Document11 pagesSACD (RCDC) - Release Note - 09.02.00ompoc123No ratings yet
- Data HazardsDocument15 pagesData HazardsPetreMaziluNo ratings yet
- Comandos ZTEDocument17 pagesComandos ZTEpaulo gadelhaNo ratings yet
- Design of BLDC Motor Using Matlab & Autocad: Mohammad Aashiq Pathan, Jayesh Hadiya, Denish Khatri, Pushpa BhatiyaDocument8 pagesDesign of BLDC Motor Using Matlab & Autocad: Mohammad Aashiq Pathan, Jayesh Hadiya, Denish Khatri, Pushpa BhatiyaAnanggadhipa Sedyanto PutroNo ratings yet
- Optrex Im50240 Modificacion 2Document8 pagesOptrex Im50240 Modificacion 2Pedro PerezNo ratings yet
- UEE605 Lect 4 Direct YbusDocument16 pagesUEE605 Lect 4 Direct YbusAditya AdityaNo ratings yet
- Learn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.From EverandLearn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.No ratings yet
- PoleSlip78W GDocument88 pagesPoleSlip78W GJIMENEZPSNo ratings yet
- Bus - R: RN - TRDocument1 pageBus - R: RN - TRJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFL FallaDocument23 pagesPowerSwing Parameter F2PH GFL FallaJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFM 2Document23 pagesPowerSwing Parameter F2PH GFM 2JIMENEZPSNo ratings yet
- PowerSwing Parameter 68WDocument23 pagesPowerSwing Parameter 68WJIMENEZPSNo ratings yet
- Estabilidad de La Función Diferencial Del Transformador: Importar Datos COMTRADEDocument66 pagesEstabilidad de La Función Diferencial Del Transformador: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- DIgSILENT-Print 76Document3 pagesDIgSILENT-Print 76JIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument86 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- It's Nice To Meet You!Document7 pagesIt's Nice To Meet You!Héctor AlvarezNo ratings yet
- El Presente de Indicativo - Verbos IrregularesDocument10 pagesEl Presente de Indicativo - Verbos IrregularesMadalina DobindaNo ratings yet
- Dropbox L1 - Third AssignmentDocument2 pagesDropbox L1 - Third AssignmentLily HenNo ratings yet
- ÁLGEBRA Semana9Document45 pagesÁLGEBRA Semana9carlos rubio garciaNo ratings yet
- Guía de Mercantil UcvDocument43 pagesGuía de Mercantil UcvErick BarreraNo ratings yet
- Verbos Repaso-1bDocument5 pagesVerbos Repaso-1bMonica AlvaradoNo ratings yet
- Corea - Leyendas Del Monte KumgangDocument175 pagesCorea - Leyendas Del Monte KumgangBadineriNo ratings yet
- Worksheet: Interrogative Questions, PrepositionsDocument1 pageWorksheet: Interrogative Questions, PrepositionsJoaquinNo ratings yet
- Pronabec - Beca 18 (Sugerencias)Document18 pagesPronabec - Beca 18 (Sugerencias)Marco Sifuentes ChNo ratings yet
- Unidad 11 THDocument1 pageUnidad 11 THPedro Choque RamirezNo ratings yet
- Lectura de Actividad 1 Al 28 Legislacion SocietariaDocument206 pagesLectura de Actividad 1 Al 28 Legislacion SocietariaLuz clarita RamosNo ratings yet
- Verbe To Like AnglaisDocument1 pageVerbe To Like AnglaisAbdellatif Ousman TidjaniNo ratings yet
- Practico3 TributariaDocument32 pagesPractico3 TributariaRosario VelezNo ratings yet
- Actividad 1 Modulo 1 Ingles 1Document4 pagesActividad 1 Modulo 1 Ingles 1Leslie Judith SuarezNo ratings yet
- 114 Past Simple - Regular Verbs AffirmativeDocument1 page114 Past Simple - Regular Verbs AffirmativeCarlosNo ratings yet
- Acta Sura AgostoDocument35 pagesActa Sura Agostoandres millanNo ratings yet
- Act Grupal 102003 9Document16 pagesAct Grupal 102003 9davidNo ratings yet
- Líneas de Crédito para Pymes: Beatriz Elena Londoño PatiñoDocument18 pagesLíneas de Crédito para Pymes: Beatriz Elena Londoño PatiñoValeria GonzálezNo ratings yet
- Spanish Notes For Preterite and ImperfectDocument1 pageSpanish Notes For Preterite and ImperfectStella ReedNo ratings yet
- Starters Lesson 3Document2 pagesStarters Lesson 3kenia MargaritaNo ratings yet
- Direct and Indirect Object Pronouns Used TogetherDocument5 pagesDirect and Indirect Object Pronouns Used TogetherStephen SuttonNo ratings yet
- Pretérito Perfecto Simple o Pretérito IndefinidoDocument3 pagesPretérito Perfecto Simple o Pretérito IndefinidoHarumi GonzálezNo ratings yet
- Verbos Pronombres Personales Yo Tú Él, Ella, Usted Nosotros (As) Ellos, Ellas, UstedesDocument3 pagesVerbos Pronombres Personales Yo Tú Él, Ella, Usted Nosotros (As) Ellos, Ellas, UstedesPaula QuizanaNo ratings yet
- Nccu-246 TrabajofinalDocument5 pagesNccu-246 TrabajofinalEsther Rocio Zuñiga Cueva100% (1)
- Lab No. 1Document16 pagesLab No. 1Paula RamírezNo ratings yet
- Me C 202123826193 AppDocument182 pagesMe C 202123826193 AppNeida MontoyaNo ratings yet
- Juego de Cerditos: VimosDocument4 pagesJuego de Cerditos: VimosNatalia Carolina Cifuentes SanchezNo ratings yet
- X ESLyG EA5Document8 pagesX ESLyG EA5EDNo ratings yet
- Preterito Cuaderno GramaticaDocument10 pagesPreterito Cuaderno GramaticaZara HernandezNo ratings yet


























































































Download as pdf or txt
You might also like
- Spanish Verbs With PrepositionsDocument12 pagesSpanish Verbs With PrepositionsAmra-Refik Mujanovic100% (1)
- Elec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Document4 pagesElec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Filip ZubacNo ratings yet
- PowerSwing Parameter 68WDocument23 pagesPowerSwing Parameter 68WJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFM 2Document23 pagesPowerSwing Parameter F2PH GFM 2JIMENEZPSNo ratings yet
- PoleSlip78W GDocument88 pagesPoleSlip78W GJIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument26 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument86 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFL FallaDocument23 pagesPowerSwing Parameter F2PH GFL FallaJIMENEZPSNo ratings yet
- Importar Datos COMTRADE: Siemens 7Sj62Document35 pagesImportar Datos COMTRADE: Siemens 7Sj62JIMENEZPSNo ratings yet
- Picoblaze Interrupt Interface & Assembly Code Development: Ece 448 - Fpga and Asic Design With VHDLDocument25 pagesPicoblaze Interrupt Interface & Assembly Code Development: Ece 448 - Fpga and Asic Design With VHDLAnimesh SharmaNo ratings yet
- Regression VariousDocument17 pagesRegression VariousDennis Uygur AnderssonNo ratings yet
- Jfet Spice Data CTC 036 InterfetDocument16 pagesJfet Spice Data CTC 036 InterfetaudiosteveNo ratings yet
- Restrained Current Differential Relay Model: ... /3PHEXT - CFGDocument12 pagesRestrained Current Differential Relay Model: ... /3PHEXT - CFGramlijavierNo ratings yet
- Unit 2 Mcu PDFDocument12 pagesUnit 2 Mcu PDFatulNo ratings yet
- ARIMA Predict ForecastDocument1 pageARIMA Predict ForecastManoj MNo ratings yet
- Array Processors: SIMD Computer OrganizationDocument45 pagesArray Processors: SIMD Computer OrganizationArshad Matin100% (1)
- EIGRPv6 LabDocument8 pagesEIGRPv6 Labyokayo1994No ratings yet
- ANTES Y DESPUES LADO Sbb-Asw-00Document7 pagesANTES Y DESPUES LADO Sbb-Asw-00andryfloresotsNo ratings yet
- Flip Flop Problem 0Document12 pagesFlip Flop Problem 0Download UseNo ratings yet
- 6803 Instruction Set (68HC11 Subset)Document93 pages6803 Instruction Set (68HC11 Subset)Saukani HalimNo ratings yet
- Fmult/Accum: Low Resource Design ProposalDocument9 pagesFmult/Accum: Low Resource Design Proposalabhishek9126No ratings yet
- Task 02: Example of Analysing Data and Residual Volatility and Estimating ARCH and GARCH ModelsDocument12 pagesTask 02: Example of Analysing Data and Residual Volatility and Estimating ARCH and GARCH ModelsJustina SasnauskaiteNo ratings yet
- CiscoxalcatelDocument23 pagesCiscoxalcatelwell-rjNo ratings yet
- Commands CCNPDocument7 pagesCommands CCNPفخر العمايمNo ratings yet
- J7 PDFDocument10 pagesJ7 PDFManohar PNo ratings yet
- Labsheet Exp4Document6 pagesLabsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- Calling Procedure in ABAP Using ADBCDocument2 pagesCalling Procedure in ABAP Using ADBCvivianNo ratings yet
- Cmos Vlsi Design Lab 3: Controller Design and Verification: I. Aludec LogicDocument7 pagesCmos Vlsi Design Lab 3: Controller Design and Verification: I. Aludec LogicdrhammoudaNo ratings yet
- Load Flow AnalysisDocument15 pagesLoad Flow AnalysisMazo Ahmed ShiponNo ratings yet
- SeminarDocument29 pagesSeminarMohan UrsNo ratings yet
- BC420 - 46C - 013special MethodsDocument26 pagesBC420 - 46C - 013special MethodsmkumarshahiNo ratings yet
- 5.1 Bode Plots and Nichols ChartsDocument7 pages5.1 Bode Plots and Nichols ChartsMd. HarunNo ratings yet
- GAMS Result Example 16.2Document10 pagesGAMS Result Example 16.2teguhNo ratings yet
- Digital Logic Design: Register Transfer Specification & DesignDocument22 pagesDigital Logic Design: Register Transfer Specification & Designsunny louisNo ratings yet
- 18 LockfreeDocument51 pages18 Lockfreejsathy97No ratings yet
- Modelo - 2D Sat 01 - DebugDocument32 pagesModelo - 2D Sat 01 - DebugEmílioFariasVazNo ratings yet
- FormulaDocument4 pagesFormulamargaret_navaeiNo ratings yet
- 1) Pile Work: Total Amount Cost Per RFTDocument30 pages1) Pile Work: Total Amount Cost Per RFTbasum matNo ratings yet
- Clase 3 y 4 Econometria 2 (Autocorrelación) PDFDocument12 pagesClase 3 y 4 Econometria 2 (Autocorrelación) PDFTomas UrregoNo ratings yet
- Solutions RegressionTutorialDocument51 pagesSolutions RegressionTutorialARBIN RAJNo ratings yet
- C PDFDocument23 pagesC PDFTATATAHERNo ratings yet
- MC Trilinear Ej 1Document3 pagesMC Trilinear Ej 1Hernan David Florez OlivaresNo ratings yet
- MIPS32 Instruction Set Quick Reference: L B - F O J A B (N: O D S)Document2 pagesMIPS32 Instruction Set Quick Reference: L B - F O J A B (N: O D S)JayNo ratings yet
- Custom Single Purpose Processor DesignDocument24 pagesCustom Single Purpose Processor DesignAar Kay GautamNo ratings yet
- LAB 7 Report: Course Title: Control SystemsDocument5 pagesLAB 7 Report: Course Title: Control SystemsTajdar HaiderNo ratings yet
- Arco de Doble Radio CIV-201 PDFDocument6 pagesArco de Doble Radio CIV-201 PDFWara Jhosmara RiosNo ratings yet
- 3EJ4 Set 07 Mixed Signal MJDDocument45 pages3EJ4 Set 07 Mixed Signal MJDSoroush AkNo ratings yet
- Parameter CalculationDocument10 pagesParameter CalculationSANJIDA AKTERNo ratings yet
- IAC Curves: T, I, Is or T CalculationDocument5 pagesIAC Curves: T, I, Is or T CalculationAnonymous sLRlLluNo ratings yet
- MSP430 Instruction SetDocument9 pagesMSP430 Instruction Setnyana87No ratings yet
- Distancia VS SiemensDocument11 pagesDistancia VS SiemensJIMENEZPSNo ratings yet
- Cia 1.2Document4 pagesCia 1.2Neha AyyagariNo ratings yet
- SACD (RCDC) - Release Note - 09.02.00Document11 pagesSACD (RCDC) - Release Note - 09.02.00ompoc123No ratings yet
- Data HazardsDocument15 pagesData HazardsPetreMaziluNo ratings yet
- Comandos ZTEDocument17 pagesComandos ZTEpaulo gadelhaNo ratings yet
- Design of BLDC Motor Using Matlab & Autocad: Mohammad Aashiq Pathan, Jayesh Hadiya, Denish Khatri, Pushpa BhatiyaDocument8 pagesDesign of BLDC Motor Using Matlab & Autocad: Mohammad Aashiq Pathan, Jayesh Hadiya, Denish Khatri, Pushpa BhatiyaAnanggadhipa Sedyanto PutroNo ratings yet
- Optrex Im50240 Modificacion 2Document8 pagesOptrex Im50240 Modificacion 2Pedro PerezNo ratings yet
- UEE605 Lect 4 Direct YbusDocument16 pagesUEE605 Lect 4 Direct YbusAditya AdityaNo ratings yet
- Learn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.From EverandLearn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.No ratings yet
- PoleSlip78W GDocument88 pagesPoleSlip78W GJIMENEZPSNo ratings yet
- Bus - R: RN - TRDocument1 pageBus - R: RN - TRJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFL FallaDocument23 pagesPowerSwing Parameter F2PH GFL FallaJIMENEZPSNo ratings yet
- PowerSwing Parameter F2PH GFM 2Document23 pagesPowerSwing Parameter F2PH GFM 2JIMENEZPSNo ratings yet
- PowerSwing Parameter 68WDocument23 pagesPowerSwing Parameter 68WJIMENEZPSNo ratings yet
- Estabilidad de La Función Diferencial Del Transformador: Importar Datos COMTRADEDocument66 pagesEstabilidad de La Función Diferencial Del Transformador: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- DIgSILENT-Print 76Document3 pagesDIgSILENT-Print 76JIMENEZPSNo ratings yet
- Función Distancia / Diferencial de Línea: Importar Datos COMTRADEDocument86 pagesFunción Distancia / Diferencial de Línea: Importar Datos COMTRADEJIMENEZPSNo ratings yet
- It's Nice To Meet You!Document7 pagesIt's Nice To Meet You!Héctor AlvarezNo ratings yet
- El Presente de Indicativo - Verbos IrregularesDocument10 pagesEl Presente de Indicativo - Verbos IrregularesMadalina DobindaNo ratings yet
- Dropbox L1 - Third AssignmentDocument2 pagesDropbox L1 - Third AssignmentLily HenNo ratings yet
- ÁLGEBRA Semana9Document45 pagesÁLGEBRA Semana9carlos rubio garciaNo ratings yet
- Guía de Mercantil UcvDocument43 pagesGuía de Mercantil UcvErick BarreraNo ratings yet
- Verbos Repaso-1bDocument5 pagesVerbos Repaso-1bMonica AlvaradoNo ratings yet
- Corea - Leyendas Del Monte KumgangDocument175 pagesCorea - Leyendas Del Monte KumgangBadineriNo ratings yet
- Worksheet: Interrogative Questions, PrepositionsDocument1 pageWorksheet: Interrogative Questions, PrepositionsJoaquinNo ratings yet
- Pronabec - Beca 18 (Sugerencias)Document18 pagesPronabec - Beca 18 (Sugerencias)Marco Sifuentes ChNo ratings yet
- Unidad 11 THDocument1 pageUnidad 11 THPedro Choque RamirezNo ratings yet
- Lectura de Actividad 1 Al 28 Legislacion SocietariaDocument206 pagesLectura de Actividad 1 Al 28 Legislacion SocietariaLuz clarita RamosNo ratings yet
- Verbe To Like AnglaisDocument1 pageVerbe To Like AnglaisAbdellatif Ousman TidjaniNo ratings yet
- Practico3 TributariaDocument32 pagesPractico3 TributariaRosario VelezNo ratings yet
- Actividad 1 Modulo 1 Ingles 1Document4 pagesActividad 1 Modulo 1 Ingles 1Leslie Judith SuarezNo ratings yet
- 114 Past Simple - Regular Verbs AffirmativeDocument1 page114 Past Simple - Regular Verbs AffirmativeCarlosNo ratings yet
- Acta Sura AgostoDocument35 pagesActa Sura Agostoandres millanNo ratings yet
- Act Grupal 102003 9Document16 pagesAct Grupal 102003 9davidNo ratings yet
- Líneas de Crédito para Pymes: Beatriz Elena Londoño PatiñoDocument18 pagesLíneas de Crédito para Pymes: Beatriz Elena Londoño PatiñoValeria GonzálezNo ratings yet
- Spanish Notes For Preterite and ImperfectDocument1 pageSpanish Notes For Preterite and ImperfectStella ReedNo ratings yet
- Starters Lesson 3Document2 pagesStarters Lesson 3kenia MargaritaNo ratings yet
- Direct and Indirect Object Pronouns Used TogetherDocument5 pagesDirect and Indirect Object Pronouns Used TogetherStephen SuttonNo ratings yet
- Pretérito Perfecto Simple o Pretérito IndefinidoDocument3 pagesPretérito Perfecto Simple o Pretérito IndefinidoHarumi GonzálezNo ratings yet
- Verbos Pronombres Personales Yo Tú Él, Ella, Usted Nosotros (As) Ellos, Ellas, UstedesDocument3 pagesVerbos Pronombres Personales Yo Tú Él, Ella, Usted Nosotros (As) Ellos, Ellas, UstedesPaula QuizanaNo ratings yet
- Nccu-246 TrabajofinalDocument5 pagesNccu-246 TrabajofinalEsther Rocio Zuñiga Cueva100% (1)
- Lab No. 1Document16 pagesLab No. 1Paula RamírezNo ratings yet
- Me C 202123826193 AppDocument182 pagesMe C 202123826193 AppNeida MontoyaNo ratings yet
- Juego de Cerditos: VimosDocument4 pagesJuego de Cerditos: VimosNatalia Carolina Cifuentes SanchezNo ratings yet
- X ESLyG EA5Document8 pagesX ESLyG EA5EDNo ratings yet
- Preterito Cuaderno GramaticaDocument10 pagesPreterito Cuaderno GramaticaZara HernandezNo ratings yet