Download as pdf or txt
You might also like
- DVPmysqlucFederation at Flickr: Doing Billions of Queries Per DayDocument26 pagesDVPmysqlucFederation at Flickr: Doing Billions of Queries Per DayDathan Vance Pattishall95% (22)
- Documentatie Foamico R3 Uk - Mo 0122 - Mo 0122 D - Mo 0122 FD 22-11-2011Document26 pagesDocumentatie Foamico R3 Uk - Mo 0122 - Mo 0122 D - Mo 0122 FD 22-11-2011Dascalu ValentinNo ratings yet
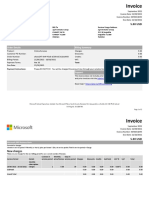
- Invoice: Order Details Billing SummaryDocument2 pagesInvoice: Order Details Billing SummaryNasir ArslanNo ratings yet
- EN - ACS480 - HW - D - A4 Web PDFDocument180 pagesEN - ACS480 - HW - D - A4 Web PDFERICK OSWALDONo ratings yet
- Toshiba Power MOSFETsDocument34 pagesToshiba Power MOSFETsEdgar DauzonNo ratings yet
- PLDC02126 - T.S.M. - CT 80 - Rev. 00 - EN PDFDocument92 pagesPLDC02126 - T.S.M. - CT 80 - Rev. 00 - EN PDFEriflonaNo ratings yet
- Introduction To Revit SlidesDocument12 pagesIntroduction To Revit Slidesgouravbhatia200189100% (1)
- Lenze Motor 87hzDocument2 pagesLenze Motor 87hzGian Carlos Perea DiazNo ratings yet
- Riello Gulliver RS5D Gas Burner Df41c2dc.889Document16 pagesRiello Gulliver RS5D Gas Burner Df41c2dc.889Virgil CenariuNo ratings yet
- Baldor VS1MD Micro Series ManualDocument163 pagesBaldor VS1MD Micro Series ManualSteve WozniakNo ratings yet
- MTC Software Manual (Current Use)Document28 pagesMTC Software Manual (Current Use)Sharath Teja ReddyNo ratings yet
- Troubleshooting For Unidrive SP Commander GP20Document4 pagesTroubleshooting For Unidrive SP Commander GP20castkarthickNo ratings yet
- W516 E1 02+CP1L ELEM - CPU+OperManual PDFDocument854 pagesW516 E1 02+CP1L ELEM - CPU+OperManual PDFAnonymous POne8dNo ratings yet
- Apr48-Apu48 B7053088Document2 pagesApr48-Apu48 B7053088jcguillenNo ratings yet
- Operating Manual: FeaturesDocument2 pagesOperating Manual: FeaturesTahera SiddiquiNo ratings yet
- SBP Series With ICD200 UM 2013-05 R200Document18 pagesSBP Series With ICD200 UM 2013-05 R200Jose LunaNo ratings yet
- COMSATS Institute of Information Technology: Lab Project Report Basic Ac To DC ConverterDocument4 pagesCOMSATS Institute of Information Technology: Lab Project Report Basic Ac To DC ConverterHasham100% (1)
- Broc Rovsing - Open Predictor - CBMDocument12 pagesBroc Rovsing - Open Predictor - CBMapi-27411749100% (1)
- R-G2 Controller Maintenance PDFDocument336 pagesR-G2 Controller Maintenance PDFpabs2604No ratings yet
- Moc 3063 DataDocument11 pagesMoc 3063 DataPaula OspinaNo ratings yet
- Sigma-5 Brochure EDocument32 pagesSigma-5 Brochure EF HusaimaNo ratings yet
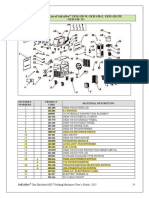
- 13.4. Spare Part List of Gekamac GKM 420-2GDocument2 pages13.4. Spare Part List of Gekamac GKM 420-2GBa MamadouNo ratings yet
- BMD4064 Input/Output Module ApplicationDocument8 pagesBMD4064 Input/Output Module Applicationreza rifqil aziz100% (1)
- Wartsila o P Ihimu CRPDocument6 pagesWartsila o P Ihimu CRPNguyễn Tấn TrưởngNo ratings yet
- Kewo Solar Pump Drive CatalogDocument15 pagesKewo Solar Pump Drive Catalogiulius299No ratings yet
- Teknic MCPV Manual Frame 56Document209 pagesTeknic MCPV Manual Frame 56jnbxyzNo ratings yet
- MoMaExampleLD90 PDFDocument29 pagesMoMaExampleLD90 PDFEdson Pires da SilvaNo ratings yet
- OEM750 Entire Rev B PDFDocument100 pagesOEM750 Entire Rev B PDFIdono ManameNo ratings yet
- LG Hb45eDocument141 pagesLG Hb45enikola1660100% (3)
- Chromophare® D 300: Minor Surgical and Examination Light Pre-Installation GuideDocument14 pagesChromophare® D 300: Minor Surgical and Examination Light Pre-Installation GuideROSSINo ratings yet
- LXC701 V1.1 enDocument8 pagesLXC701 V1.1 enAnonymous vqsuRy100% (1)
- PD55B2-Drv 150uh L9101: 100KF RQ9102 1KF RQ9104Document2 pagesPD55B2-Drv 150uh L9101: 100KF RQ9102 1KF RQ9104nmo1122100% (1)
- ENG ITA SPA: User Guide Manuale Di Uso Guía Del UsuarioDocument144 pagesENG ITA SPA: User Guide Manuale Di Uso Guía Del UsuarioGusNo ratings yet
- KingView 6.52 Introduction PDFDocument108 pagesKingView 6.52 Introduction PDFconan lcNo ratings yet
- Fuji Frenic-Vg7sDocument50 pagesFuji Frenic-Vg7sMathawee ChotchaiNo ratings yet
- TC3001 With COMMDocument139 pagesTC3001 With COMMmd3001abcNo ratings yet
- 1) Smps Using Viper22A: Circuit DiagramDocument6 pages1) Smps Using Viper22A: Circuit DiagramBhadreshkumar SharmaNo ratings yet
- User Manual: The Team To Trust The Team To TrustDocument211 pagesUser Manual: The Team To Trust The Team To TrustSandu RaduNo ratings yet
- ACS800 Democase Default ParametersDocument14 pagesACS800 Democase Default ParametersRemigio MendozaNo ratings yet
- OHD Thermal Guard: ApplicationsDocument11 pagesOHD Thermal Guard: ApplicationsJoseNo ratings yet
- BLDC Sepic Motor Torque ControlDocument60 pagesBLDC Sepic Motor Torque ControlSuresh SsbnNo ratings yet
- Kinetix 300Document222 pagesKinetix 300Raul Villalvazo0% (1)
- Transformer Protection System: Grid SolutionsDocument836 pagesTransformer Protection System: Grid SolutionsMariana Ribeiro GentaNo ratings yet
- 6sr41 SeriesDocument202 pages6sr41 Seriesfireza husnulNo ratings yet
- Technical PG620 (Rev)Document7 pagesTechnical PG620 (Rev)W Winarto100% (1)
- ABB - ACS850 DriveStudio PDFDocument2 pagesABB - ACS850 DriveStudio PDFavijit dasNo ratings yet
- Uputstvo EDS800 PDFDocument139 pagesUputstvo EDS800 PDFrzrasaNo ratings yet
- Alternator AK6450Document8 pagesAlternator AK6450Cris_eu09No ratings yet
- 1LG0 Catalogue (En)Document23 pages1LG0 Catalogue (En)Sandi AslanNo ratings yet
- LR200Document21 pagesLR200atheb12345100% (1)
- FC 1 Do 12Document12 pagesFC 1 Do 12veroljubdjNo ratings yet
- FY Operation Manual V200602Document48 pagesFY Operation Manual V200602Vicente ChinchillaNo ratings yet
- CXD2861ERDocument30 pagesCXD2861ERZaegorNo ratings yet
- D1632ENDocument163 pagesD1632ENJason LaCognata50% (2)
- 6ILS-MUK - Juli 11 - ENDocument63 pages6ILS-MUK - Juli 11 - ENGerald0% (1)
- Low Voltage Alternator - 4 Pole: 400V - 50 HZ / 480V - 60 HZ Electrical and Mechanical DataDocument12 pagesLow Voltage Alternator - 4 Pole: 400V - 50 HZ / 480V - 60 HZ Electrical and Mechanical Dataمحمود المستكاويNo ratings yet
- Riello Sentinel Power Green SPW 5 6kva SPT 6-5-10kva User ManualDocument31 pagesRiello Sentinel Power Green SPW 5 6kva SPT 6-5-10kva User ManualAhmed mahlawyNo ratings yet
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocument6 pagesArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNo ratings yet
- Equipment 1Document73 pagesEquipment 1darapuNo ratings yet
- Soft Drive 200 DesignDocument22 pagesSoft Drive 200 DesignMine RHNo ratings yet
- STR58U Mastepact ACBDocument74 pagesSTR58U Mastepact ACB322399mk7086No ratings yet
- Sinano ZH-CN en PDFDocument53 pagesSinano ZH-CN en PDFHieuNo ratings yet
- Template-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanDocument10 pagesTemplate-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanmurgadeepNo ratings yet
- ED600Document16 pagesED600Nasir ArslanNo ratings yet
- Ed510 User ManualDocument150 pagesEd510 User ManualNasir ArslanNo ratings yet
- Statement of ObjectiveDocument1 pageStatement of ObjectiveNasir ArslanNo ratings yet
- Office 2 Hash CatDocument51 pagesOffice 2 Hash CatNasir ArslanNo ratings yet
- IphoneDocument4 pagesIphoneNasir ArslanNo ratings yet
- Ration Small RuminantsDocument19 pagesRation Small RuminantsNasir ArslanNo ratings yet
- Balancing Ration For SheepsDocument6 pagesBalancing Ration For SheepsNasir ArslanNo ratings yet
- Fesco Online BilllDocument1 pageFesco Online BilllNasir ArslanNo ratings yet
- Most Important Fcps Mcqs Solved: 6-Distruction of Ant - Pituatary Gland Causes Dec - Functioning of Glom - FasiculataDocument13 pagesMost Important Fcps Mcqs Solved: 6-Distruction of Ant - Pituatary Gland Causes Dec - Functioning of Glom - FasiculataNasir ArslanNo ratings yet
- Flexi RF Module 3TX 2100 : Technical SpecificationsDocument9 pagesFlexi RF Module 3TX 2100 : Technical SpecificationsReza BordbarNo ratings yet
- Computer Fundamentals Basic MCQ Questions and AnswerDocument6 pagesComputer Fundamentals Basic MCQ Questions and AnswergyanNo ratings yet
- Longmont Senior Services GO Catalog, Winter 2013 and 2014Document60 pagesLongmont Senior Services GO Catalog, Winter 2013 and 2014City of Longmont, ColoradoNo ratings yet
- Service Manual nGENUITY R2 - NHAN - k12VLY (070 076)Document7 pagesService Manual nGENUITY R2 - NHAN - k12VLY (070 076)Vy Tô Nguyễn TườngNo ratings yet
- Huawei GSM Mrfu v2 Operation Guide - 20100909 - A - v1.3Document14 pagesHuawei GSM Mrfu v2 Operation Guide - 20100909 - A - v1.3c2poyraz100% (3)
- Clock Domain ClockingDocument12 pagesClock Domain Clockingarunsrl100% (1)
- 2d Arcade GameDocument20 pages2d Arcade Gamerajputpriyank4867No ratings yet
- Embankment Calculation Using C3DDocument25 pagesEmbankment Calculation Using C3DPriyeshBabarNo ratings yet
- F4se WhatsnewDocument7 pagesF4se WhatsnewAnonymous JS9yloQSzNNo ratings yet
- CA2KN22P7 DocumentDocument2 pagesCA2KN22P7 DocumentRavi SankarNo ratings yet
- (Week 7) Lecture 13 & 14: Compiler Construction (CS-636)Document12 pages(Week 7) Lecture 13 & 14: Compiler Construction (CS-636)Muqaddas ZulfiqarNo ratings yet
- Packet Sniffing: - by Aarti DhoneDocument13 pagesPacket Sniffing: - by Aarti Dhonejaveeed0401No ratings yet
- CLV TutorialDocument11 pagesCLV TutorialJohn ParkNo ratings yet
- Oracle Credit ControlDocument176 pagesOracle Credit ControlPata nahiNo ratings yet
- Pscad ManualDocument511 pagesPscad ManualSammie AuduNo ratings yet
- Materials Today: Proceedings: Sunil Khabia, Kamlesh K. JainDocument8 pagesMaterials Today: Proceedings: Sunil Khabia, Kamlesh K. JainSunil KhabiaNo ratings yet
- UntitledDocument24 pagesUntitledlantta_pauliNo ratings yet
- Teltonika FM1120 User Manual v4.2Document87 pagesTeltonika FM1120 User Manual v4.2Javier PeñaNo ratings yet
- Secospace USG2000Document6 pagesSecospace USG2000Utopia MediaNo ratings yet
- Study of Google Firebase Services - A Smart Road To BackendDocument2 pagesStudy of Google Firebase Services - A Smart Road To BackendInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Data Modeling ExamDocument4 pagesData Modeling ExammbpasumarthiNo ratings yet
- Primacs TOC Analyser: Chapter 7: Components and AccessoriesDocument6 pagesPrimacs TOC Analyser: Chapter 7: Components and AccessoriesAnonymous 2LYCWDPuiuNo ratings yet
- Module 17 Physics 605Document24 pagesModule 17 Physics 605Automan IntertradeNo ratings yet
- YLM - SW사용매뉴얼 v1.1 - ENGDocument53 pagesYLM - SW사용매뉴얼 v1.1 - ENGsebastianandrei2008008No ratings yet
- Code ExplanationDocument3 pagesCode ExplanationShilpa KamagariNo ratings yet
- IT Policy - Network Security PolicyDocument4 pagesIT Policy - Network Security Policygobang66No ratings yet
- Speed Command HZ: - Inv032 - Movevelocityhz: This FBDocument3 pagesSpeed Command HZ: - Inv032 - Movevelocityhz: This FBJosephNo ratings yet
- Creating Graphs and Charts in ExcelDocument6 pagesCreating Graphs and Charts in Excelapi-228290705No ratings yet