Download as pdf or txt
You might also like
- A Convergence Result For Critical Reversible Nearest Particle SystemsDocument61 pagesA Convergence Result For Critical Reversible Nearest Particle Systemsky khai nguyenNo ratings yet
- KorovkinDocument10 pagesKorovkinMurali KNo ratings yet
- Statistical Convergence of Double Sequences On Probabilistic Normed SpacesDocument11 pagesStatistical Convergence of Double Sequences On Probabilistic Normed SpacesosmanNo ratings yet
- MehlingDocument19 pagesMehlingDanNo ratings yet
- TMP 5 E24Document6 pagesTMP 5 E24FrontiersNo ratings yet
- On The Application of A Newton Raphson'S Iterative Method of The Fixed Point Theory To The Solution of A Chemical Equilibrium ProblemDocument20 pagesOn The Application of A Newton Raphson'S Iterative Method of The Fixed Point Theory To The Solution of A Chemical Equilibrium ProblemjejomarNo ratings yet
- Hamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Ohreren LehranstaltenDocument13 pagesHamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Ohreren LehranstaltenIon Caciula100% (1)
- Uniform Boundedness (Gliding Hump)Document6 pagesUniform Boundedness (Gliding Hump)rbb_l181No ratings yet
- Applied Mathematics Letters: A. Amini-HarandiDocument4 pagesApplied Mathematics Letters: A. Amini-HarandiunebelleNo ratings yet
- Research Article Some Remarks On Fixed Point Theorems For Interpolative Kannan ContractionDocument7 pagesResearch Article Some Remarks On Fixed Point Theorems For Interpolative Kannan Contractionjhudddar99No ratings yet
- On Multi-Valued Weak Contraction Mappings: Published by Canadian Center of Science and EducationDocument6 pagesOn Multi-Valued Weak Contraction Mappings: Published by Canadian Center of Science and EducationLuis Arce GonzálezNo ratings yet
- Approximating Fixed Points of Enriched Contractions in Banach SpacesDocument10 pagesApproximating Fixed Points of Enriched Contractions in Banach SpacesMalik MajidNo ratings yet
- Contraction PrincipleDocument21 pagesContraction PrincipleriyasNo ratings yet
- Chebyshev Polynomials (Cook)Document4 pagesChebyshev Polynomials (Cook)yacp16761No ratings yet
- Electronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeDocument10 pagesElectronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeLuis FuentesNo ratings yet
- Ly Thuyet Diem Bat Dong Cua Banch Va Hinh Cau FormalDocument3 pagesLy Thuyet Diem Bat Dong Cua Banch Va Hinh Cau FormaldmtriNo ratings yet
- StabilityDocument103 pagesStabilityIghalo osedebamen DanielNo ratings yet
- Derivation of The Nonlinear SCHR Odinger Equation From Many Body Quantum DynamicsDocument32 pagesDerivation of The Nonlinear SCHR Odinger Equation From Many Body Quantum DynamicsNeeraj KrNo ratings yet
- Fixed Point Theory and Applications: Fixed Point Theorems For Weakly C-Contractive Mappings in Partial Metric SpacesDocument18 pagesFixed Point Theory and Applications: Fixed Point Theorems For Weakly C-Contractive Mappings in Partial Metric SpacesAnca Maria AncaNo ratings yet
- Tifr 26Document147 pagesTifr 26Ramesh KumarNo ratings yet
- Lecture 2: Entropy and Mutual Information: 2.1 ExampleDocument8 pagesLecture 2: Entropy and Mutual Information: 2.1 Exampless_18No ratings yet
- BanachDocument7 pagesBanachAnuradha yadavNo ratings yet
- B671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDocument13 pagesB671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDesmond SeahNo ratings yet
- MIT18.650. Statistics For Applications Fall 2016. Problem Set 3Document3 pagesMIT18.650. Statistics For Applications Fall 2016. Problem Set 3yilvasNo ratings yet
- Nonlinear Observer Design For Smooth SystemsDocument13 pagesNonlinear Observer Design For Smooth Systemsoussama sadkiNo ratings yet
- APM3344Document17 pagesAPM3344José VanterlerNo ratings yet
- A Fixed Point Theorem of Kannan Type That Characterizes Fuzzy Metric CompletenessDocument9 pagesA Fixed Point Theorem of Kannan Type That Characterizes Fuzzy Metric CompletenessMuhammadNo ratings yet
- 1 Regression Analysis and Least Squares EstimatorsDocument7 pages1 Regression Analysis and Least Squares EstimatorsFreddie YuanNo ratings yet
- Random Signals: 1 Kolmogorov's Axiomatic Definition of ProbabilityDocument14 pagesRandom Signals: 1 Kolmogorov's Axiomatic Definition of ProbabilitySeham RaheelNo ratings yet
- Some Coincidence and Fixed Point Results For Hybrid ContractionDocument14 pagesSome Coincidence and Fixed Point Results For Hybrid ContractionAlexander DeckerNo ratings yet
- Iterative Approximation of Fixed Points For Pseudo-Contractive OperatorsDocument7 pagesIterative Approximation of Fixed Points For Pseudo-Contractive Operatorsvahid mesicNo ratings yet
- 2203 05917Document19 pages2203 05917FlorinNo ratings yet
- tmp34BA TMPDocument5 pagestmp34BA TMPFrontiersNo ratings yet
- PENGANTAR FISIKA KUANTUM Chapter3Document5 pagesPENGANTAR FISIKA KUANTUM Chapter3Indah pratiwiNo ratings yet
- Style LaTeXDocument14 pagesStyle LaTeXAnimesh GuptaNo ratings yet
- 10.1515 - Ans 2007 0309Document21 pages10.1515 - Ans 2007 0309samihabelm92No ratings yet
- The Banach-Steinhaus Theorem and The Convergence of Integrals of ProductsDocument15 pagesThe Banach-Steinhaus Theorem and The Convergence of Integrals of Productsboris peñaNo ratings yet
- 6 Uniform Boundedness PrincipleDocument6 pages6 Uniform Boundedness PrincipleMiguel Angel Mora LunaNo ratings yet
- Fundamental MathsDocument165 pagesFundamental MathszuhairNo ratings yet
- Cauchy Criterion, Bolzano-Weierstrass TheoremDocument2 pagesCauchy Criterion, Bolzano-Weierstrass TheorempeeyushtewariNo ratings yet
- 0 Tlemcen Mio ContribDocument49 pages0 Tlemcen Mio Contribtesfayetlh_400418456No ratings yet
- Term End Exam 2015: ηK = η, where η = diag (1,Document2 pagesTerm End Exam 2015: ηK = η, where η = diag (1,ianuliNo ratings yet
- MIT8 04S16 ps3 2016Document4 pagesMIT8 04S16 ps3 2016Fabian M Vargas FontalvoNo ratings yet
- 1 Regenerative Processes: 1.1 ExamplesDocument10 pages1 Regenerative Processes: 1.1 ExamplesErika Kristina SinagaNo ratings yet
- Two Proofs of The Central Limit TheoremDocument13 pagesTwo Proofs of The Central Limit Theoremavi_weberNo ratings yet
- An Introduction To MCFDocument77 pagesAn Introduction To MCFDaniel da Costa SilvaNo ratings yet
- Existence and Uniqueness of A Positive Steady State Solution For A Logistic System of Differential Difference EquationsDocument12 pagesExistence and Uniqueness of A Positive Steady State Solution For A Logistic System of Differential Difference EquationsVictor PadronNo ratings yet
- Bstract N N Z Z N N Z Z N 1 2N +1 N N N N NDocument6 pagesBstract N N Z Z N N Z Z N 1 2N +1 N N N N NGaston GBNo ratings yet
- Key Words and PhrasesDocument21 pagesKey Words and Phrasesjesusdark44No ratings yet
- Contraction PDFDocument27 pagesContraction PDFMauriNo ratings yet
- L23 - Postulates of QMDocument24 pagesL23 - Postulates of QMdomagix470No ratings yet
- Limiting Average Cost Control Problems in A Class of Discrete-Time Stochastic SystemsDocument13 pagesLimiting Average Cost Control Problems in A Class of Discrete-Time Stochastic SystemsLuis Alberto FuentesNo ratings yet
- Heat Ex Homo Rad1Document6 pagesHeat Ex Homo Rad1Carlos Andres Theran SuarezNo ratings yet
- Prof Stanley Dukin Lectures Statistical MechanicsDocument43 pagesProf Stanley Dukin Lectures Statistical MechanicsEdney GranhenNo ratings yet
- Fixed Point Theorem For Mapping Satisfying A Contractive Condition of Integral Type in D-Metric SpacesDocument2 pagesFixed Point Theorem For Mapping Satisfying A Contractive Condition of Integral Type in D-Metric SpacesSTATPERSON PUBLISHING CORPORATIONNo ratings yet
- 1 s2.0 S0022247X17309629 MainDocument14 pages1 s2.0 S0022247X17309629 Mainhongquan19dhvNo ratings yet
- Modern Control TheroryDocument11 pagesModern Control TheroryvasudevananishNo ratings yet
- 1 Regression Analysis and Least Squares EstimatorsDocument8 pages1 Regression Analysis and Least Squares EstimatorsJenningsJingjingXuNo ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- TOK Essay OrganizerDocument4 pagesTOK Essay Organizerada su tunaNo ratings yet
- Sample TOK IntroductionsDocument4 pagesSample TOK Introductionsada su tunaNo ratings yet
- Body Paragraph BreakdownDocument2 pagesBody Paragraph Breakdownada su tunaNo ratings yet
- Tasche JournalOfAppliedProbabilityDocument15 pagesTasche JournalOfAppliedProbabilityada su tunaNo ratings yet
- Stephen Jardin - Computational Methods in Plasma PhysicsDocument364 pagesStephen Jardin - Computational Methods in Plasma PhysicsEdward MataNo ratings yet
- Hard Math #3 ProblemsDocument28 pagesHard Math #3 Problemsapi-3839111100% (3)
- IntegrationDocument123 pagesIntegrationHari KrushnaNo ratings yet
- Quantum LeadershipDocument20 pagesQuantum LeadershipBir Delinin Psikopatolojisi100% (1)
- Applied Frequency-Domain System Identification in The Field of Experimental Modal AnalysisDocument83 pagesApplied Frequency-Domain System Identification in The Field of Experimental Modal AnalysismasoudNo ratings yet
- Algorismus of "Hauksbók" An Old Norse Text of 1310 On Hindu-Arabic Numeration and CalculationDocument7 pagesAlgorismus of "Hauksbók" An Old Norse Text of 1310 On Hindu-Arabic Numeration and CalculationfyyyNo ratings yet
- University of Cape CoastDocument3 pagesUniversity of Cape CoastEmmanuel EshunNo ratings yet
- Simplify Algebraic Expressions (With ANSWERS)Document3 pagesSimplify Algebraic Expressions (With ANSWERS)Hsus JeieidNo ratings yet
- Analytic Number TheoryDocument8 pagesAnalytic Number TheoryaoajvxazzjxohenwmrNo ratings yet
- Controllability and Observability For A Class of Time-Varying Impulsive Systems On Time ScalesDocument30 pagesControllability and Observability For A Class of Time-Varying Impulsive Systems On Time ScalesZoubia DastgeerNo ratings yet
- Semi-Detailed Lesson Plan in Teaching Mathematics Grade 9Document3 pagesSemi-Detailed Lesson Plan in Teaching Mathematics Grade 9ERIX VALMADRIDNo ratings yet
- International A Level Mathematics Pure Mathematics 3 Student Book SampleDocument34 pagesInternational A Level Mathematics Pure Mathematics 3 Student Book SampleHadi HindiNo ratings yet
- A Critical Look at Modular Adders Using RNSDocument8 pagesA Critical Look at Modular Adders Using RNSRaja ChandruNo ratings yet
- NishitDocument6 pagesNishitdileep gillNo ratings yet
- Handbook of The Mathematics of The Arts and Sciences 1St Edition Bharath Sriraman Online Ebook Texxtbook Full Chapter PDFDocument56 pagesHandbook of The Mathematics of The Arts and Sciences 1St Edition Bharath Sriraman Online Ebook Texxtbook Full Chapter PDFkayla.apodaca631100% (11)
- Chapter 1 and 2 PDFDocument31 pagesChapter 1 and 2 PDFKors Min YeolNo ratings yet
- Investigation On Volume and Surface Area of CylinderDocument4 pagesInvestigation On Volume and Surface Area of CylinderMuhammad Asad AliNo ratings yet
- Counting Part 3 (KM Koh, BP Tan)Document6 pagesCounting Part 3 (KM Koh, BP Tan)Filipe CaceresNo ratings yet
- ME478 FEA Su08 Syllabus PDFDocument2 pagesME478 FEA Su08 Syllabus PDFNurrohman NurrohmanNo ratings yet
- Assignment FunctionsDocument5 pagesAssignment FunctionsNeelamNo ratings yet
- SPH Modeling Using LS DynaDocument6 pagesSPH Modeling Using LS DynaBarath SundarNo ratings yet
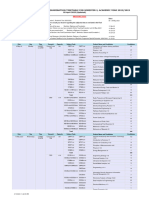
- 05 April 2023 - Putrajaya Campus Final Examination Schedule Semester 2 2022 - 2023Document7 pages05 April 2023 - Putrajaya Campus Final Examination Schedule Semester 2 2022 - 2023LOGESHWARAN SOUNDRARAJANNo ratings yet
- Babu Excel TestDocument259 pagesBabu Excel TestkuttyboyNo ratings yet
- Activity 12 Finding Fibonacci Patterns in Nature PDFDocument8 pagesActivity 12 Finding Fibonacci Patterns in Nature PDFJoann Delos santosNo ratings yet
- Chapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsDocument54 pagesChapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsboymatterNo ratings yet
- AnglesDocument23 pagesAnglesJoann NgNo ratings yet
- Class 9Document14 pagesClass 9Jhon EstwoodNo ratings yet
- Scatter PlotDocument5 pagesScatter PlotNavdeep raoNo ratings yet
- XXIX Asian Pacific Mathematics OlympiadDocument2 pagesXXIX Asian Pacific Mathematics OlympiadMohit GargNo ratings yet
- Tower of HanoiDocument2 pagesTower of Hanoiapi-281272453No ratings yet