Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- E Ex 4350 Assignment 1Document2 pagesE Ex 4350 Assignment 1Madusanka Weebedda100% (1)
- 2 UkDocument2 pages2 UkJosé ManuelNo ratings yet
- 3 V Headphone Amplifier: Ton GiesbertsDocument1 page3 V Headphone Amplifier: Ton GiesbertsTariq ZuhlufNo ratings yet
- Some Simple Tachometer Input Circuits: SteveDocument3 pagesSome Simple Tachometer Input Circuits: SteveSơn PhạmNo ratings yet
- Prototype Design-Lks-KeyDocument8 pagesPrototype Design-Lks-KeyManap 21No ratings yet
- Digitally Programmable Resistor Serves As Test Load: Edn - Boston Then Denver Then Highlands Ranch Co - March 2005Document2 pagesDigitally Programmable Resistor Serves As Test Load: Edn - Boston Then Denver Then Highlands Ranch Co - March 2005ciccioNo ratings yet
- By Sunil Malekar (Elektor Labs India) : March & April 2015Document4 pagesBy Sunil Malekar (Elektor Labs India) : March & April 2015Agnivesh PandeyNo ratings yet
- Way Huge Red Llama CmosDocument9 pagesWay Huge Red Llama CmoskoshkimayNo ratings yet
- Report - Flashing LED ExperimentDocument6 pagesReport - Flashing LED ExperimentAnonymous rsxb6oEGpNo ratings yet
- QPSKDocument28 pagesQPSKgopiNo ratings yet
- Di-91 Design Idea Tinyswitch-Iii: 12 W Universal Input CV AdapterDocument2 pagesDi-91 Design Idea Tinyswitch-Iii: 12 W Universal Input CV Adapterahmed chaouki ChamiNo ratings yet
- TNY278PNDocument4 pagesTNY278PNJose BenavidesNo ratings yet
- Di-187 Design Idea Topswitch-Hx: 35 W LCD MonitorDocument2 pagesDi-187 Design Idea Topswitch-Hx: 35 W LCD MonitorIvanê FonsecaNo ratings yet
- Halogen 12vDocument17 pagesHalogen 12veryNo ratings yet
- Psc1065k SdsDocument6 pagesPsc1065k SdsCynthiaNo ratings yet
- Clapper CircuitDocument6 pagesClapper Circuitsameed2010No ratings yet
- AT89C2051-based Countdown TimerDocument3 pagesAT89C2051-based Countdown TimerKumawat ArunNo ratings yet
- Circuit Diagram of DC Motor Control Using A Single SwitchDocument2 pagesCircuit Diagram of DC Motor Control Using A Single SwitchZaid_Bin_KokabNo ratings yet
- Half Bridge Driver With IR2153 IGBT PDFDocument4 pagesHalf Bridge Driver With IR2153 IGBT PDFShibu Kumar SNo ratings yet
- Di-123 Design Idea Tinyswitch-Iii: 9.65 W, Dual Output Power Supply For Residential Heating ControlDocument2 pagesDi-123 Design Idea Tinyswitch-Iii: 9.65 W, Dual Output Power Supply For Residential Heating Controlahmed chaouki ChamiNo ratings yet
- Circuito de Ayuda en El AparcamientoDocument3 pagesCircuito de Ayuda en El AparcamientoGiancarloRichardRivadeneyraMirandaNo ratings yet
- Schematic Boost Converter Sheet 1 20191024172646Document1 pageSchematic Boost Converter Sheet 1 20191024172646NatasyaNo ratings yet
- SW Converter For AM Radio: Summer CircuitscollectionDocument2 pagesSW Converter For AM Radio: Summer CircuitscollectionRadunNo ratings yet
- DatasheetDocument2 pagesDatasheetRyanz Nayrz100% (1)
- Bike FlasherDocument2 pagesBike FlasherVolin RabahNo ratings yet
- DCM FlybackDocument11 pagesDCM FlybackAaron ShiehNo ratings yet
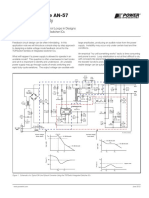
- Topswitch Family: Application Note An-57Document16 pagesTopswitch Family: Application Note An-57Paulo de Amorim CostaNo ratings yet
- Illustrated Assembly Manual k2579Document12 pagesIllustrated Assembly Manual k2579Long Nguyen KimNo ratings yet
- Electrical Technology Nov 2020 (Digital) EngDocument25 pagesElectrical Technology Nov 2020 (Digital) EngdledlesphesihleNo ratings yet
- LCS Assignment 1Document7 pagesLCS Assignment 1Ahad MunawarNo ratings yet
- ODL Lab7Document6 pagesODL Lab7Muhammad SameerNo ratings yet
- CPV 364 M 4 KDocument11 pagesCPV 364 M 4 KlalihifiNo ratings yet
- Pico C (English) - Part1Document6 pagesPico C (English) - Part1RenéNo ratings yet
- Internal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, DsecDocument26 pagesInternal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, Dsecsetsindia3735No ratings yet
- Slua 253Document4 pagesSlua 253armin rahmatiNo ratings yet
- POWERDocument1 pagePOWERFırat KağıtçıNo ratings yet
- AN-4104 Fairchild Elenota - PLDocument18 pagesAN-4104 Fairchild Elenota - PLdavidthijsNo ratings yet
- Test 777888 PPPQQQDocument3 pagesTest 777888 PPPQQQLeonard GržetićNo ratings yet
- Series/Parallel Equivalent Circuits in Excel: Summer CircuitscollectionDocument1 pageSeries/Parallel Equivalent Circuits in Excel: Summer CircuitscollectionPablo Diego Cecere CasadoNo ratings yet
- Tesla Coil Driver Using SG3525 1 PDFDocument1 pageTesla Coil Driver Using SG3525 1 PDFNguyen Phuoc HoNo ratings yet
- MR VictorDocument16 pagesMR VictorP1nice48No ratings yet
- DC Motor Speed Controller 1Document1 pageDC Motor Speed Controller 1Antonio BentoNo ratings yet
- DC Motor Speed Controller 1 PDFDocument1 pageDC Motor Speed Controller 1 PDFRyn YahuFNo ratings yet
- DC Motor Speed Controller 1 PDFDocument1 pageDC Motor Speed Controller 1 PDFyukie heningNo ratings yet
- DC-MOTOR-SPEED-CONTROLLER-1 Using 3525 Circuit of Oscillator PDFDocument1 pageDC-MOTOR-SPEED-CONTROLLER-1 Using 3525 Circuit of Oscillator PDFChAmirShokatGujjar100% (2)
- DC Motor Speed Controller 1Document1 pageDC Motor Speed Controller 1AUREL PASCUNo ratings yet
- EasyArc Zx7-200 Igbt Inverter WelderDocument1 pageEasyArc Zx7-200 Igbt Inverter WelderSandeep Kumar67% (12)
- Mc100e131fn (D Flip Flop) ICDocument8 pagesMc100e131fn (D Flip Flop) ICDwp BhaskaranNo ratings yet
- Marten Repeller: Inaudible 90 DBDocument4 pagesMarten Repeller: Inaudible 90 DBMAN4 BANTULNo ratings yet
- Electronic Car HornDocument2 pagesElectronic Car HornViraj ShirodkarNo ratings yet
- Report - CT FinalDocument12 pagesReport - CT FinalArup DasNo ratings yet
- 74 75 - DIY - 230V AC Bulb Holder - EFY - Dec 20Document2 pages74 75 - DIY - 230V AC Bulb Holder - EFY - Dec 20Jai SharmaNo ratings yet
- Dual PolarityDocument2 pagesDual Polaritysavour99No ratings yet
- Di146 0Document2 pagesDi146 0amitNo ratings yet
- EE230: LAB 3 Opamp Circuit: 1 Overview of The ExperimentDocument11 pagesEE230: LAB 3 Opamp Circuit: 1 Overview of The ExperimentHARSH GARGNo ratings yet
- Schematic - A-RF POWER - 2022-08-22Document1 pageSchematic - A-RF POWER - 2022-08-22VICTOR HUGO PULIDO QUIÑONESNo ratings yet
- Raport Laboratoare 1-14Document97 pagesRaport Laboratoare 1-14Fage RaulNo ratings yet
- D'Lay by Guitarpcb: Value Value Value ValueDocument5 pagesD'Lay by Guitarpcb: Value Value Value ValueВиталий ИвановNo ratings yet
- Easy Home Remote Control: Carlos FerreiraDocument3 pagesEasy Home Remote Control: Carlos FerreiraJohn SmithNo ratings yet
- Temperature Sensitive Switch For Solar Collector: Tom HenskensDocument2 pagesTemperature Sensitive Switch For Solar Collector: Tom HenskensJohn SmithNo ratings yet
- Expansion For Universal Interface: Roland PlischDocument1 pageExpansion For Universal Interface: Roland PlischJohn SmithNo ratings yet
- TM1000 1Document2 pagesTM1000 1John SmithNo ratings yet
- Simple Slave Flash: F RoeskyDocument1 pageSimple Slave Flash: F RoeskyJohn SmithNo ratings yet
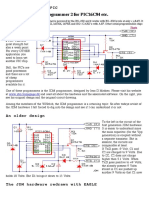
- Fruttenboel PIC SectionDocument2 pagesFruttenboel PIC SectionJohn SmithNo ratings yet
- Data Sheet: 74LVC2G07Document13 pagesData Sheet: 74LVC2G07Le DungNo ratings yet
- Vlsi TechnologyDocument8 pagesVlsi TechnologynitiniitrNo ratings yet
- Microchip Analog EbookDocument31 pagesMicrochip Analog EbookJosé ManuelNo ratings yet
- 74HC4075Document9 pages74HC4075jnax101No ratings yet
- Job Description: Job Title: RF IC Design Engineer Department: Engineering Manager: CTO Location: FlexibleDocument2 pagesJob Description: Job Title: RF IC Design Engineer Department: Engineering Manager: CTO Location: Flexibleraju mudigondaNo ratings yet
- A Fully Static True-Single-Phase-Clocked Dual-Edge-Triggered Flip-Flop For Near-Threshold Voltage Operation in Iot ApplicationsDocument14 pagesA Fully Static True-Single-Phase-Clocked Dual-Edge-Triggered Flip-Flop For Near-Threshold Voltage Operation in Iot Applicationsaman shaikhNo ratings yet
- Boeuf-Iedm SC 2013-Nov15 Full VersionDocument95 pagesBoeuf-Iedm SC 2013-Nov15 Full VersionDuckie CucuNo ratings yet
- MC145406 PDocument10 pagesMC145406 PpoindextNo ratings yet
- FPGA DS 02007 2 2 CrossLink Family Data SheetDocument67 pagesFPGA DS 02007 2 2 CrossLink Family Data SheetВячеслав ЛогиновNo ratings yet
- Design and Implementation of Power Estimation Technique For Digital Circuits IJERTV3IS041503Document10 pagesDesign and Implementation of Power Estimation Technique For Digital Circuits IJERTV3IS041503Keerthana SudarshanNo ratings yet
- Lecture6,7-Logic Design - Transistors To Gates-FinalDocument46 pagesLecture6,7-Logic Design - Transistors To Gates-FinalattarshahriarNo ratings yet
- Textbook Energy Efficient Smart Temperature Sensors in Cmos Technology 1St Edition Kamran Souri Ebook All Chapter PDFDocument53 pagesTextbook Energy Efficient Smart Temperature Sensors in Cmos Technology 1St Edition Kamran Souri Ebook All Chapter PDFcharles.mansfield418100% (15)
- Ijesrt: Leakage Current Reduction Techniques For CMOS CircuitsDocument4 pagesIjesrt: Leakage Current Reduction Techniques For CMOS CircuitsShailendra YadavNo ratings yet
- Philips Mosfet Class AbDocument9 pagesPhilips Mosfet Class AbAnthony Fernandez MendezNo ratings yet
- Gitam PHDDocument17 pagesGitam PHDvasagirisureshNo ratings yet
- 74HC151Document11 pages74HC151jnax101No ratings yet
- 28-Pseudo Nmos, DCVSL and Dynamic Logic-12!09!2020 (12-Sep-2020) Material I 12-Sep-2020 CMOS Combinational Circuit DesignDocument22 pages28-Pseudo Nmos, DCVSL and Dynamic Logic-12!09!2020 (12-Sep-2020) Material I 12-Sep-2020 CMOS Combinational Circuit DesignParth VijayNo ratings yet
- LED Driver IC: DescriptionDocument12 pagesLED Driver IC: Descriptionanand shekhawatNo ratings yet
- AEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFDocument8 pagesAEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFNguyen Quang VinhNo ratings yet
- Konark ReportDocument4 pagesKonark ReportPriyank PatelNo ratings yet
- The Ultimate Electrical Engineering Book List With Emphasis On ElectromagneticsDocument15 pagesThe Ultimate Electrical Engineering Book List With Emphasis On ElectromagneticsAsdf FdsaNo ratings yet
- Lecture 06 PDFDocument12 pagesLecture 06 PDFattiqueNo ratings yet
- Vlsi Static Inverter Lab ReortDocument8 pagesVlsi Static Inverter Lab ReortSsemakula FrankNo ratings yet
- An Energy-Efficient Conditional-Boosting Flip-Flop With Conditional Pulse For Low Power ApplicationDocument7 pagesAn Energy-Efficient Conditional-Boosting Flip-Flop With Conditional Pulse For Low Power ApplicationShreyas MaheshNo ratings yet
- International Technology Roadmap For Semiconductors: 2008 Itrs OrtcDocument23 pagesInternational Technology Roadmap For Semiconductors: 2008 Itrs Ortcvishal garadNo ratings yet
- Vlsi PDFDocument55 pagesVlsi PDFKruthikNo ratings yet
- A Wide-PCE-Dynamic-Range CMOS Cross-Coupled Differential-Drive Rectifier For Ambient RF Energy HarvestingDocument5 pagesA Wide-PCE-Dynamic-Range CMOS Cross-Coupled Differential-Drive Rectifier For Ambient RF Energy Harvestinghusam hamidNo ratings yet
- ELN-Module 2 Notes VtuDocument12 pagesELN-Module 2 Notes VtuFariya TasneemNo ratings yet
- 2021-10-05 Infineon CMD IFX Day 2021 - 0 - Agenda Key Messages Appendix PDFDocument17 pages2021-10-05 Infineon CMD IFX Day 2021 - 0 - Agenda Key Messages Appendix PDFLouis PaulusNo ratings yet
- Automotive Electronics From Herman CasierDocument123 pagesAutomotive Electronics From Herman Casiersrikanth chundiNo ratings yet