Download as pdf or txt
You might also like
- Meteoro GS100Document1 pageMeteoro GS100Vítor Ávila75% (4)
- Fender SP-10 SchematicDocument1 pageFender SP-10 SchematicZL2ABV50% (4)
- A A Deluxe Memory ManDocument1 pageA A Deluxe Memory ManFranciscoR89100% (2)
- The Maki-Physics - 2 PDFDocument163 pagesThe Maki-Physics - 2 PDFSijaona Robert100% (2)
- MWD Mud-Pulse System SperrySunDocument77 pagesMWD Mud-Pulse System SperrySunkfranovsky100% (1)
- Rev Counter: PDF Created With Pdffactory Trial VersionDocument1 pageRev Counter: PDF Created With Pdffactory Trial VersionVictor RoblesNo ratings yet
- +VCC - VCC: Fuse 100-120V F0.5/250V 220-240V F0.5/250VDocument1 page+VCC - VCC: Fuse 100-120V F0.5/250V 220-240V F0.5/250Vpmaldona93No ratings yet
- Priyanka ProjectDocument1 pagePriyanka ProjectPriyanka DeshpandeNo ratings yet
- Probador rj45Document1 pageProbador rj45Manuel Rivas100% (1)
- Probador rj45Document1 pageProbador rj45Manuel Rivas100% (2)
- PC10Document1 pagePC10margono akurasi100% (2)
- SW1 R1 1K: Graph of XSC1 12Document1 pageSW1 R1 1K: Graph of XSC1 12Jorge Antonio GuillenNo ratings yet
- SKP VZ194-114-schDocument5 pagesSKP VZ194-114-schSalim ÖzcanNo ratings yet
- Pre Amplificador de Audi: Jasama SystemDocument1 pagePre Amplificador de Audi: Jasama SystemAlvaro Canaviri MamaniNo ratings yet
- Expansion For Universal Interface: Roland PlischDocument1 pageExpansion For Universal Interface: Roland PlischJohn SmithNo ratings yet
- ASM2 - Voltage Controlled OscillatorDocument1 pageASM2 - Voltage Controlled OscillatorAnonymous vzuOQuHx3100% (1)
- GH 13Document2 pagesGH 13DanLucca Fernando SamosirNo ratings yet
- PropB3 F0 WM8727Document3 pagesPropB3 F0 WM8727Paweł WalencikNo ratings yet
- Schematic - INPUT BALLANCE - 2024 05 22Document1 pageSchematic - INPUT BALLANCE - 2024 05 22orlandofedrikNo ratings yet
- Index: Circuit Diagram Working Principle Description Comparision With Other Application Disadvantages ReferenceDocument26 pagesIndex: Circuit Diagram Working Principle Description Comparision With Other Application Disadvantages Referenceinfinite2towersNo ratings yet
- CREST7001Document15 pagesCREST7001griphonicusNo ratings yet
- Diagrama EsquemáticoDocument2 pagesDiagrama EsquemáticoJuan Sebastian GiraldoNo ratings yet
- Elektor Electronics 1998-12Document82 pagesElektor Electronics 1998-12Adrian_Andrei_4433100% (1)
- Ee 1989 12extraDocument80 pagesEe 1989 12extraAdrian_Andrei_4433100% (2)
- Adam Audio S2.5A (05-07-05)Document17 pagesAdam Audio S2.5A (05-07-05)vigesmedocNo ratings yet
- 13tr-t4d 40m SSBDocument1 page13tr-t4d 40m SSBfox7878No ratings yet
- 2020 06 30 - 20 57 53 - 958102Document1 page2020 06 30 - 20 57 53 - 958102Daniel OfoeNo ratings yet
- tl494 PWM MDocument1 pagetl494 PWM Mluisrijo24No ratings yet
- Crest Pro4801 Amplifier SchematicDocument18 pagesCrest Pro4801 Amplifier SchematicVentsi MolevNo ratings yet
- Noblex MNX500BT Mini Sistema de Audio CD-MP3-USB-BT DiagramaDocument12 pagesNoblex MNX500BT Mini Sistema de Audio CD-MP3-USB-BT DiagramaFroilan GonzalezNo ratings yet
- OCM500 SCHDocument1 pageOCM500 SCHNosdan LemosNo ratings yet
- Rat SynthrotekDocument1 pageRat Synthrotek吳語 Wú Yǔ Wu.No ratings yet
- PNP 100W Technical MrigankaDocument2 pagesPNP 100W Technical MrigankadumitricamadalinNo ratings yet
- Schematic FX-80B RevJ0Document2 pagesSchematic FX-80B RevJ0Beckenbauer ErnstbergerNo ratings yet
- FX 80 BDocument1 pageFX 80 BBeckenbauer ErnstbergerNo ratings yet
- National Instruments: 801-111 Peter Street Toronto, ON M5V 2H1 (416) 977-5550Document4 pagesNational Instruments: 801-111 Peter Street Toronto, ON M5V 2H1 (416) 977-5550Cesar MartínezNo ratings yet
- 逆变直流升压Document1 page逆变直流升压何青No ratings yet
- Receptor Am DiagDocument1 pageReceptor Am Diaggustavo da silvaNo ratings yet
- Circuit Collections 001-030Document30 pagesCircuit Collections 001-030zawmintun1No ratings yet
- 7812TV Ic1: 1 Vi 1 Vo 3 GNDDocument1 page7812TV Ic1: 1 Vi 1 Vo 3 GNDAnonymous 4aChpF1hZNo ratings yet
- Esquema Cl500heDocument1 pageEsquema Cl500heGibinho CharlinhoNo ratings yet
- Schematic Function Gen Part 1Document2 pagesSchematic Function Gen Part 1pecceriniNo ratings yet
- Adjustable Low Pass FilterDocument11 pagesAdjustable Low Pass Filteralanbermeo058No ratings yet
- Aux Power - RevBDocument1 pageAux Power - RevBKornélIllyésNo ratings yet
- wh10 PDFDocument4 pageswh10 PDFMatheus AlvesNo ratings yet
- 308 Eurorack Distortion Module SchematicDocument1 page308 Eurorack Distortion Module Schematicdreadlock holidayNo ratings yet
- 1 Con PicDocument1 page1 Con Picapi-3714448No ratings yet
- ESQUEMA ELETRICO Atomic 50Document1 pageESQUEMA ELETRICO Atomic 50Paulo JuniorNo ratings yet
- Schematic - LX1518 PCB Nuova Elettronica - 2021-11-14Document1 pageSchematic - LX1518 PCB Nuova Elettronica - 2021-11-14cesare.brocchiNo ratings yet
- AMERICAN AUDIO Power ÄmplifierDocument2 pagesAMERICAN AUDIO Power ÄmplifierDaniel Ofoe100% (1)
- APX 152 PoweredDocument2 pagesAPX 152 PoweredJorge GarciaNo ratings yet
- PDF Created With Fineprint Pdffactory Trial Version: ZoudangDocument1 pagePDF Created With Fineprint Pdffactory Trial Version: ZoudangNguyen Nguyễn Phương LinhNo ratings yet
- Meteoro Power CB150 IIDocument1 pageMeteoro Power CB150 IIAndreiaSouzaNo ratings yet
- V59-T9C1 (U1-Ob5269, U4-Ob3362)Document1 pageV59-T9C1 (U1-Ob5269, U4-Ob3362)pedroNo ratings yet
- Schematic - Power Meter - 2020-06-10 - 08-59-36Document1 pageSchematic - Power Meter - 2020-06-10 - 08-59-36Yoshua M FANo ratings yet
- Crest 10001 Display26c1528 SchematicDocument1 pageCrest 10001 Display26c1528 SchematicHenry Jose Larez RojasNo ratings yet
- Crest-Audio 10001 SCH PDFDocument12 pagesCrest-Audio 10001 SCH PDFRohmad FauziNo ratings yet
- Crest 10001 Display26c1528 SchematicDocument1 pageCrest 10001 Display26c1528 SchematicHenry Jose Larez RojasNo ratings yet
- Receptor de Radio FM Con Tda7000: Neoteo Mundo ElectrónicaDocument1 pageReceptor de Radio FM Con Tda7000: Neoteo Mundo Electrónicajulio floresNo ratings yet
- mp123 Fonte de Alimentação PDFDocument1 pagemp123 Fonte de Alimentação PDFSergio Daniel BarretoNo ratings yet
- The Power of Scarcity: Leveraging Urgency and Demand to Influence Customer DecisionsFrom EverandThe Power of Scarcity: Leveraging Urgency and Demand to Influence Customer DecisionsNo ratings yet
- Arduino and HC-12 Long Range Wireless Communication Module - HowToMechatronicsDocument25 pagesArduino and HC-12 Long Range Wireless Communication Module - HowToMechatronicsJosé ManuelNo ratings yet
- Introduction To C++Document21 pagesIntroduction To C++José ManuelNo ratings yet
- Week 4Document26 pagesWeek 4José ManuelNo ratings yet
- Week 2Document19 pagesWeek 2José ManuelNo ratings yet
- RC Servo Tester/Exerciser: Ray KingDocument2 pagesRC Servo Tester/Exerciser: Ray KingJosé ManuelNo ratings yet
- Week 1Document17 pagesWeek 1José ManuelNo ratings yet
- Week 3Document17 pagesWeek 3José ManuelNo ratings yet
- 2 UkDocument2 pages2 UkJosé ManuelNo ratings yet
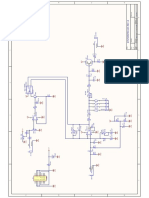
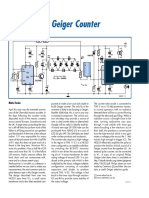
- Geiger Counter: Malte FischerDocument1 pageGeiger Counter: Malte FischerJosé Manuel100% (1)
- 1 UkDocument2 pages1 UkJosé ManuelNo ratings yet
- Increased Range For DVM: 2 V 910k 100k 20 V 1M 10k 200 V 1M 1k 2000 V 1M 100 200 Ma 0 1k 2 Ma 0 100 20 Ma 0 10 200 Ma 0 1Document1 pageIncreased Range For DVM: 2 V 910k 100k 20 V 1M 10k 200 V 1M 1k 2000 V 1M 100 200 Ma 0 1k 2 Ma 0 100 20 Ma 0 10 200 Ma 0 1José ManuelNo ratings yet
- Hybrid Headphone Amp: Jeff MacaulayDocument2 pagesHybrid Headphone Amp: Jeff MacaulayJosé ManuelNo ratings yet
- Step-Down Converter Controller: Dirk Gehrke, Texas InstrumentsDocument2 pagesStep-Down Converter Controller: Dirk Gehrke, Texas InstrumentsJosé ManuelNo ratings yet
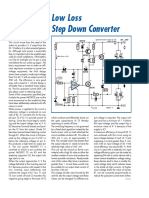
- Low Loss Step Down Converter: Michel FrankeDocument1 pageLow Loss Step Down Converter: Michel FrankeJosé ManuelNo ratings yet
- Universal LCD Module: Ullrich KreiensenDocument3 pagesUniversal LCD Module: Ullrich KreiensenJosé ManuelNo ratings yet
- Amptitudes - MicrochipDocument5 pagesAmptitudes - MicrochipJosé ManuelNo ratings yet
- Microchip Analog EbookDocument31 pagesMicrochip Analog EbookJosé ManuelNo ratings yet
- 3D Printed Robot Arm - 16 Steps (With Pictures)Document25 pages3D Printed Robot Arm - 16 Steps (With Pictures)José ManuelNo ratings yet
- Amphenol Solutions GuideDocument374 pagesAmphenol Solutions Guidejovares2099No ratings yet
- Smart Measurement Technology For Smart FactoriesDocument16 pagesSmart Measurement Technology For Smart FactoriesaleNo ratings yet
- NCERT Class 10 Science Lab Manual - Resistors in Parallel - CBSE TutsDocument15 pagesNCERT Class 10 Science Lab Manual - Resistors in Parallel - CBSE TutsVinodKumarTummalurNo ratings yet
- The Laws of Biot-Savart & Ampere: Physics 1304: Lecture 12, PG 1Document34 pagesThe Laws of Biot-Savart & Ampere: Physics 1304: Lecture 12, PG 1helmi_umamNo ratings yet
- La 78040Document4 pagesLa 78040Wilton Carlos SilvaNo ratings yet
- Shopping Trolley - ReportDocument125 pagesShopping Trolley - ReportRajeshwar SinghNo ratings yet
- Skin Response Meter: Sameer Salam B.E 3Rd Year, Ece-A Roll No:160309735050Document1 pageSkin Response Meter: Sameer Salam B.E 3Rd Year, Ece-A Roll No:160309735050Sameer SalamNo ratings yet
- Erv-Yu Star Delta Relay: GeneralDocument1 pageErv-Yu Star Delta Relay: GeneralMai Văn BáchNo ratings yet
- Development of The Ring Goniometer For Radio Direction Finders-lJdDocument5 pagesDevelopment of The Ring Goniometer For Radio Direction Finders-lJdeducatorNo ratings yet
- Avr Project - Atmega8 Based RPM MeterDocument11 pagesAvr Project - Atmega8 Based RPM MetersatyamNo ratings yet
- 74HC590Document18 pages74HC590Juan José Lopez NietoNo ratings yet
- Lrp14Ge / Lrp14Gx: Residential Product SpecificationsDocument16 pagesLrp14Ge / Lrp14Gx: Residential Product SpecificationsPedro Pantoja BermejoNo ratings yet
- 314098H01 - Rev C - Thermo Scientific Revco - Plus Series ULT User ManualDocument18 pages314098H01 - Rev C - Thermo Scientific Revco - Plus Series ULT User ManualLaboratory AppliedNo ratings yet
- Valkyrie As ManualDocument2 pagesValkyrie As ManualRobson FernandesNo ratings yet
- Ziegler - Nichols Pid TuningDocument2 pagesZiegler - Nichols Pid TuningTrần Ngọc MẩnNo ratings yet
- MC200 Technical Manual: File Name: EAAM058702EN - Docx Rev. 02 Date: 20/04/2018 ID Document: EAAM0578EN Product: MC200Document215 pagesMC200 Technical Manual: File Name: EAAM058702EN - Docx Rev. 02 Date: 20/04/2018 ID Document: EAAM0578EN Product: MC200Marcos BrandãoNo ratings yet
- Wiring Method & Motor SelectionDocument33 pagesWiring Method & Motor SelectionMahbubul IslamNo ratings yet
- Vlsi Lab Manual 17ecl77 2020 SaitDocument157 pagesVlsi Lab Manual 17ecl77 2020 Saitsuraj jha100% (1)
- Lippert - Slide Out Model In-Wall (Schwintek) Owner's ManualDocument26 pagesLippert - Slide Out Model In-Wall (Schwintek) Owner's Manual28larrysjunkmail100% (1)
- CBLM - Washing Machine Ok NFPDocument51 pagesCBLM - Washing Machine Ok NFPROJANE F. BERNAS, PhD.100% (1)
- Operating Manual Radian Series Front-Ends & RectifiersDocument28 pagesOperating Manual Radian Series Front-Ends & RectifiersLuisNo ratings yet
- Moog Wind PitchServoMotor Datasheet en PDFDocument4 pagesMoog Wind PitchServoMotor Datasheet en PDFMaria TzagarakiNo ratings yet
- A Differential Op-Amp Circuit Collection: Bruce Carter High Performance Linear ProductsDocument23 pagesA Differential Op-Amp Circuit Collection: Bruce Carter High Performance Linear ProductsKushNo ratings yet
- LM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesDocument40 pagesLM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesVictor FsNo ratings yet
- 202-User Manual UPO33 160 PF365 EngDocument26 pages202-User Manual UPO33 160 PF365 EngJose MarquezNo ratings yet
- Synchronous Motors - Reference ListDocument2 pagesSynchronous Motors - Reference ListidontlikeebooksNo ratings yet
- Johannah Mae D. Abestano ECE 195 Binary Pattern Detector Finite State Machine Finite State DiagramDocument5 pagesJohannah Mae D. Abestano ECE 195 Binary Pattern Detector Finite State Machine Finite State DiagramBangon KaliNo ratings yet
- Sample MCCDocument21 pagesSample MCCjsrplc7952No ratings yet