Download as pdf or txt
You might also like
- Tolonges QuestionDocument12 pagesTolonges QuestionSheryl Bernabe67% (12)
- Exercise 5Document1 pageExercise 5Yaa aaarNo ratings yet
- The User's Guide To The Solar Dynamo Code SuryaDocument16 pagesThe User's Guide To The Solar Dynamo Code Suryasoumitrahazra100% (1)
- HEC-RAS 5.0 Users ManualDocument960 pagesHEC-RAS 5.0 Users ManualWilliam Giovanny Caballero PalaciosNo ratings yet
- Report - Transformation of Geodetic NetworksDocument8 pagesReport - Transformation of Geodetic NetworksMalissiovas GeorgeNo ratings yet
- Kinematic Diagrams & Degrees of FreedomDocument14 pagesKinematic Diagrams & Degrees of FreedomManish KumarNo ratings yet
- Coordinate Systems and TransformationsDocument13 pagesCoordinate Systems and Transformationsa320neo100% (1)
- Multiple Direction ExcitationDocument2 pagesMultiple Direction Excitationcelestinodl736No ratings yet
- ch2 PDFDocument10 pagesch2 PDFMuhammad AliNo ratings yet
- Proportional Navigation Guidance (Cite:john H Blakelock)Document7 pagesProportional Navigation Guidance (Cite:john H Blakelock)D.ViswanathNo ratings yet
- Number Synthesis Isomers Linkage TransformationDocument14 pagesNumber Synthesis Isomers Linkage TransformationSaleem KhanNo ratings yet
- Geographical Analysis - 2010 - GongDocument13 pagesGeographical Analysis - 2010 - Gongthevenue7No ratings yet
- TMP 47 BDocument12 pagesTMP 47 BFrontiersNo ratings yet
- Paper With Cover and TOCDocument49 pagesPaper With Cover and TOCشتشوتNo ratings yet
- The Prediction of Instabilities of Linear Differential Equations With Periodic CoefficientsDocument33 pagesThe Prediction of Instabilities of Linear Differential Equations With Periodic CoefficientsSaid SaidNo ratings yet
- FEA of Beam StructuresDocument38 pagesFEA of Beam StructuresHari Krishna PrasadNo ratings yet
- Wavelet Analysis of Strongly Nonlinear Systems: Avid ÁnekDocument2 pagesWavelet Analysis of Strongly Nonlinear Systems: Avid ÁnekAndresNo ratings yet
- Kinematic Diagrams & Degrees of FreedomDocument17 pagesKinematic Diagrams & Degrees of FreedomPuspita IndriyaniNo ratings yet
- 1 Fundamentals PDFDocument7 pages1 Fundamentals PDFellaNo ratings yet
- The Root Locus AnalysisDocument56 pagesThe Root Locus AnalysisJpradha KamalNo ratings yet
- 06 Co-RotationalDocument10 pages06 Co-RotationalFran BotteroNo ratings yet
- Nonlinear System Analysis-2 PDFDocument40 pagesNonlinear System Analysis-2 PDFabhishekNo ratings yet
- Lect 4 5Document26 pagesLect 4 5SAYAN SARKARNo ratings yet
- Module 3 - Spring 2019 (Compatibility Mode) PDFDocument60 pagesModule 3 - Spring 2019 (Compatibility Mode) PDFMohammad JavedNo ratings yet
- 3-D Coordinate TransformationsDocument16 pages3-D Coordinate TransformationsRico AdityaNo ratings yet
- List of Symbols: © Redzuan Abdullah, FKA, UTM Chapter1 Page 1Document45 pagesList of Symbols: © Redzuan Abdullah, FKA, UTM Chapter1 Page 1Nur Anira AsyikinNo ratings yet
- Aa4262 05Document13 pagesAa4262 05abdelmoamen nosirNo ratings yet
- Published2dNSLCTLiang Josaa 31-12-2631Document11 pagesPublished2dNSLCTLiang Josaa 31-12-2631Activities with Arnav GoelNo ratings yet
- Coordinate ConversionDocument76 pagesCoordinate ConversionMaccon StivNo ratings yet
- Computational Fluid Dynamics and Flow LabDocument13 pagesComputational Fluid Dynamics and Flow LabAna S y Y100% (1)
- CFD and It'S Applications: Presented By: Mohit Nigam SC-B, CFD Division, HR Wing, NSTLDocument56 pagesCFD and It'S Applications: Presented By: Mohit Nigam SC-B, CFD Division, HR Wing, NSTLHN DasNo ratings yet
- Peric CFDlectureDocument61 pagesPeric CFDlectureZen KyoNo ratings yet
- ADA484864Document42 pagesADA484864bambilibomsNo ratings yet
- Notes 05Document7 pagesNotes 05cuenta basuraNo ratings yet
- Degree of FreedomDocument26 pagesDegree of Freedomumair rasheedNo ratings yet
- FEM - 1 Introduction PDFDocument23 pagesFEM - 1 Introduction PDFwiyorejesend22u.infoNo ratings yet
- Frequency Domain Identification For MDOF SystemsDocument5 pagesFrequency Domain Identification For MDOF SystemsrislcNo ratings yet
- The Slope Deflection EquationDocument9 pagesThe Slope Deflection EquationrchieNo ratings yet
- A Real Time Indoor Localization ApplicationDocument12 pagesA Real Time Indoor Localization Applicationamulya5235No ratings yet
- Class-Notes Spatial Mechanisms 1Document39 pagesClass-Notes Spatial Mechanisms 1jamesNo ratings yet
- PHASEPLANEMETHODAnalysisDocument35 pagesPHASEPLANEMETHODAnalysistsegaye2321No ratings yet
- Instructor: Ks Senthil Raani: Insights!Document15 pagesInstructor: Ks Senthil Raani: Insights!Mi MiNo ratings yet
- ME424 201516 Unit4Document56 pagesME424 201516 Unit4venkateshNo ratings yet
- ME424 201516 Unit4 PDFDocument56 pagesME424 201516 Unit4 PDFharshaNo ratings yet
- Bifurcation - ScholarpediaDocument5 pagesBifurcation - ScholarpediaDimacha D MwchaharyNo ratings yet
- Elementos FinitosDocument72 pagesElementos FinitosPedro Leos100% (1)
- LASER Doppler VelocimetryDocument9 pagesLASER Doppler Velocimetryshubham jainNo ratings yet
- Perils of The GPS Phase Scintillation Index SigmaphiDocument7 pagesPerils of The GPS Phase Scintillation Index SigmaphiLeonardo PigginsNo ratings yet
- Chapter 2 - Complete PDFDocument62 pagesChapter 2 - Complete PDFNauman RiazNo ratings yet
- General Programming Procedure For Finite Element Method: (Using MAPLE)Document27 pagesGeneral Programming Procedure For Finite Element Method: (Using MAPLE)AbdallahNo ratings yet
- DSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Document12 pagesDSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Kasi Kumar KeerthipatiNo ratings yet
- 1.2. General Introduction To The Subgroups of Space Groups: by Hans WondratschekDocument18 pages1.2. General Introduction To The Subgroups of Space Groups: by Hans WondratschekbzvzvbNo ratings yet
- The Generalized Radon Transform Sampling Accuracy and Memory ConsiderationsDocument12 pagesThe Generalized Radon Transform Sampling Accuracy and Memory ConsiderationsDiego CornelioNo ratings yet
- NTOv12Document18 pagesNTOv12NeerajNo ratings yet
- Novel Coordinate Transformations For Antenna Applications: IEEE Transactions On Antennas and Propagation January 1985Document7 pagesNovel Coordinate Transformations For Antenna Applications: IEEE Transactions On Antennas and Propagation January 1985serk serkNo ratings yet
- Chapter 2Document27 pagesChapter 2Mainul Islam 312No ratings yet
- Optical Solitons and Their Shaping in A Monomode Optical Fiber With Some Inhomogeneous Dispersion ProfilesDocument7 pagesOptical Solitons and Their Shaping in A Monomode Optical Fiber With Some Inhomogeneous Dispersion ProfilesPrathap NNo ratings yet
- Multilinear Functions Of Direction And Their Uses In Differential GeometryFrom EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Differential Calculus and Its ApplicationsFrom EverandDifferential Calculus and Its ApplicationsRating: 2.5 out of 5 stars2.5/5 (6)
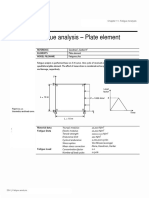
- Chapter 11 FatigueDocument9 pagesChapter 11 FatigueGeoWest MHGeoLKNEGANo ratings yet
- Chapter 12 MaterialViscoElasticityDocument38 pagesChapter 12 MaterialViscoElasticityGeoWest MHGeoLKNEGANo ratings yet
- Chapter 10 ContactAnalysisDocument14 pagesChapter 10 ContactAnalysisGeoWest MHGeoLKNEGANo ratings yet
- RC Shell Design As Per EC - 20190521 - enDocument63 pagesRC Shell Design As Per EC - 20190521 - enGeoWest MHGeoLKNEGANo ratings yet
- 03 Analysis Reference Chapter-3 ElementsDocument112 pages03 Analysis Reference Chapter-3 ElementsGeoWest MHGeoLKNEGANo ratings yet
- Chapter 9 LinearBucklingAnalysisDocument14 pagesChapter 9 LinearBucklingAnalysisGeoWest MHGeoLKNEGANo ratings yet
- Chapter 4 DynamicsDocument40 pagesChapter 4 DynamicsGeoWest MHGeoLKNEGANo ratings yet
- Structure White Paper - Structural Design Guide For Prestressed SlabsDocument48 pagesStructure White Paper - Structural Design Guide For Prestressed SlabsGeoWest MHGeoLKNEGANo ratings yet
- Analysis and Design Method of Structures Using Tension-Only ElementsDocument15 pagesAnalysis and Design Method of Structures Using Tension-Only ElementsGeoWest MHGeoLKNEGANo ratings yet
- FEM Analysis of Steel Water Tank Using Midas nGENDocument35 pagesFEM Analysis of Steel Water Tank Using Midas nGENGeoWest MHGeoLKNEGANo ratings yet
- HRS 9 Software License Installation GuideDocument31 pagesHRS 9 Software License Installation GuideAdhiawa Alif Archiafinno0% (1)
- BAT Battery DN - 6933Document10 pagesBAT Battery DN - 6933tinduongNo ratings yet
- Process Validation Tablets/CapsulesDocument4 pagesProcess Validation Tablets/Capsulesreflectprakash3610No ratings yet
- Remote Sensing Application in GeomorphologyDocument11 pagesRemote Sensing Application in GeomorphologyPietro Blu GiandonatoNo ratings yet
- 360-Article Text-2983-1-10-20210312Document14 pages360-Article Text-2983-1-10-20210312Imas MubsyirohNo ratings yet
- 2018 May June IGCSE Chemistry Past Paper 3Document16 pages2018 May June IGCSE Chemistry Past Paper 3saowanee toonchueNo ratings yet
- Convolutional Codes706760093Document27 pagesConvolutional Codes706760093Feroza MirajkarNo ratings yet
- Bhaskar AcharyaDocument2 pagesBhaskar AcharyaPravin MohatureNo ratings yet
- Bassman 400Document17 pagesBassman 400Hasanudin UdinNo ratings yet
- V.O.T.E. Mock Test 1: "Champions Keep Playing Until They Get It Right."Document45 pagesV.O.T.E. Mock Test 1: "Champions Keep Playing Until They Get It Right."Miten GandhiNo ratings yet
- Unit 1, Part 2 Chapter 4: Quadratic EquationsDocument16 pagesUnit 1, Part 2 Chapter 4: Quadratic EquationsZlata OsypovaNo ratings yet
- 3 2systems AlgDocument20 pages3 2systems AlgSyeda Saman Zahra Zaidi/TCHR/GBFNo ratings yet
- Epiq Solutions SkylightDocument2 pagesEpiq Solutions Skylightmartinsalas924gmail.comNo ratings yet
- Tutorial Altera Cyclone BoardDocument4 pagesTutorial Altera Cyclone BoardskiziltoprakNo ratings yet
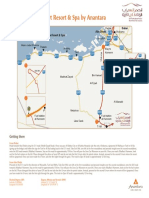
- Qasr Al Sarab Desert Resort Location Map June2012Document1 pageQasr Al Sarab Desert Resort Location Map June2012Anant GârgNo ratings yet
- FCE Reading & Use of English Guide: Exam Structure and Tasks Tips and ActivitiesDocument22 pagesFCE Reading & Use of English Guide: Exam Structure and Tasks Tips and ActivitieselisadpNo ratings yet
- Module CARE Paper1@Set3Document2 pagesModule CARE Paper1@Set3Hayati Aini AhmadNo ratings yet
- Lab 1Document6 pagesLab 1Anonymous qWuKnyZdNo ratings yet
- Problems-Fluid Flow PhenomenaDocument2 pagesProblems-Fluid Flow PhenomenaRomel LeoNo ratings yet
- DC024 TutorialDocument105 pagesDC024 TutorialazmiahNo ratings yet
- IBM Cognos TM1 WhitepaperDocument7 pagesIBM Cognos TM1 Whitepaperprabu2125No ratings yet
- IcmpDocument5 pagesIcmpusamaNo ratings yet
- Schuller's Geometric Anatomy of Theoretical Physics, Lectures 1-25Document218 pagesSchuller's Geometric Anatomy of Theoretical Physics, Lectures 1-25Simon Rea94% (16)
- Classical Mechanics by Dr. M. O. Aku PDFDocument62 pagesClassical Mechanics by Dr. M. O. Aku PDFLOUI_GR100% (1)
- Math 6 COTDocument16 pagesMath 6 COTJasmin AlduezaNo ratings yet
- Floating Point MultiplierDocument35 pagesFloating Point Multiplierbindu_ankuNo ratings yet
- The Role of The Bacterioneuston in Trace Gas Transfer: School of Biological Sciences University of WarwickDocument22 pagesThe Role of The Bacterioneuston in Trace Gas Transfer: School of Biological Sciences University of WarwickhameedhaaNo ratings yet