Download as pdf or txt
You might also like
- AI and ML Lab - VIVA QuestionsDocument7 pagesAI and ML Lab - VIVA QuestionsNavneet Kumar100% (5)
- 1 Problem Formulation Searching State SpaceDocument23 pages1 Problem Formulation Searching State Spacedivyalakshmi81889897No ratings yet
- So sánh thuật toán cây quyết định ID3 và C45Document7 pagesSo sánh thuật toán cây quyết định ID3 và C45Long ThanhNo ratings yet
- Comparative Investigation of K-Means and K-Medoid Algorithm On Iris DataDocument4 pagesComparative Investigation of K-Means and K-Medoid Algorithm On Iris DataIJERDNo ratings yet
- 3 Decision Tree LearningDocument38 pages3 Decision Tree LearningMatrix BotNo ratings yet
- Decision TreeDocument20 pagesDecision TreeTsabbit AqdamiNo ratings yet
- AI Lecture Nortes: Tim Blackwell October 24, 2016Document27 pagesAI Lecture Nortes: Tim Blackwell October 24, 2016gfhjdfNo ratings yet
- Lassification Trees: Concha Bielza, Pedro Larra NagaDocument50 pagesLassification Trees: Concha Bielza, Pedro Larra NagaRichard AvilésNo ratings yet
- Introduction To Robot Path PlanningDocument30 pagesIntroduction To Robot Path PlanningHieu Nguyen KhacNo ratings yet
- Introduction To Artificial Intelligent Artificial Intelligence (AI) Is The Branch or Field of Computer Science That Is Concerned WithDocument51 pagesIntroduction To Artificial Intelligent Artificial Intelligence (AI) Is The Branch or Field of Computer Science That Is Concerned WithRosemary OdorNo ratings yet
- DMP221 Lecture 11Document113 pagesDMP221 Lecture 11Thw LeNo ratings yet
- CSA 2001 (Module-2)Document123 pagesCSA 2001 (Module-2)Aini RizviNo ratings yet
- Chap 3Document66 pagesChap 3Labib Bin Roll no.07No ratings yet
- Artificial Intelligence (UNIT - 2)Document53 pagesArtificial Intelligence (UNIT - 2)tusharNo ratings yet
- BWG7JK53 3Document1 pageBWG7JK53 3Matthieu BridiNo ratings yet
- Tema-3 ItDocument93 pagesTema-3 Itabdullaye99021No ratings yet
- Rebalancing BSTDocument7 pagesRebalancing BSTbrodskyeNo ratings yet
- Lec 1Document13 pagesLec 1Pheonix OrionNo ratings yet
- Decision Tree 2Document20 pagesDecision Tree 2nguyenxuanthai140585No ratings yet
- Im Lion 12 PDFDocument15 pagesIm Lion 12 PDFRickz HuangNo ratings yet
- (IJCST-V2I1P1) :geethu Elizebeth Mathew, G.MalathyDocument8 pages(IJCST-V2I1P1) :geethu Elizebeth Mathew, G.MalathyIJETA - EighthSenseGroupNo ratings yet
- Unit 2Document40 pagesUnit 2vamsi kiranNo ratings yet
- Adina Institute of Science & Technology: Department of Computer Science & Engg. M.Tech CSE-II Sem Lab ManualsDocument16 pagesAdina Institute of Science & Technology: Department of Computer Science & Engg. M.Tech CSE-II Sem Lab Manualsrajneesh pachouriNo ratings yet
- 08 Networks + Short Route + Spanning (20211203)Document29 pages08 Networks + Short Route + Spanning (20211203)Lakshmi Harshitha mNo ratings yet
- Synthetic Aperture Personality Assessment: An Old Technique Applied With Modern TechnologyDocument24 pagesSynthetic Aperture Personality Assessment: An Old Technique Applied With Modern TechnologyRico ReicyhNo ratings yet
- L07-09 Tools For AI&DS - Search Algorithms - 23AIE231M Intro To AI&DS 20231116Document22 pagesL07-09 Tools For AI&DS - Search Algorithms - 23AIE231M Intro To AI&DS 20231116starlordhero1607No ratings yet
- Quad Tree: Insert FunctionDocument4 pagesQuad Tree: Insert Functionsatya PrakashNo ratings yet
- Fuzzy Decision TreesDocument12 pagesFuzzy Decision TreesVu Trung NguyenNo ratings yet
- Artificial Intelligence Chapter 3: Solving Problems by SearchingDocument32 pagesArtificial Intelligence Chapter 3: Solving Problems by SearchingFaizanNo ratings yet
- Module1 Lecture1Document23 pagesModule1 Lecture1Vivek GargNo ratings yet
- Introduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptDocument21 pagesIntroduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptpavansfdsfNo ratings yet
- Taking Apart Autoencoders: How Do They Encode Geometric Shapes ?Document19 pagesTaking Apart Autoencoders: How Do They Encode Geometric Shapes ?shubhamNo ratings yet
- AI UNIT2 Anna University NotesDocument81 pagesAI UNIT2 Anna University NotesRomaldoNo ratings yet
- 03 - AI - Week2Document60 pages03 - AI - Week2vikas kumar singhNo ratings yet
- Ai-Unit-Ii NotesDocument77 pagesAi-Unit-Ii NotesCharan 'sNo ratings yet
- DL Notes 1 5 Deep LearningDocument189 pagesDL Notes 1 5 Deep Learningsugumar100% (1)
- Titanic Machine Learning From Disaster: M.A.D.-Python Team: Dylan Kenny, Matthew Kiggans, Aleksandr SmirnovDocument11 pagesTitanic Machine Learning From Disaster: M.A.D.-Python Team: Dylan Kenny, Matthew Kiggans, Aleksandr SmirnovvarshaNo ratings yet
- Knowledge Representation - 2Document12 pagesKnowledge Representation - 2Ayush MehraNo ratings yet
- Cucs 197 85Document13 pagesCucs 197 85zpa5408No ratings yet
- Comparative Analysis of Optimizers in Deep Neural NetworksDocument4 pagesComparative Analysis of Optimizers in Deep Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MyChap3-Classification - Part 1Document21 pagesMyChap3-Classification - Part 1phhq6n4hsrNo ratings yet
- Lecture 6 - ClusteringDocument25 pagesLecture 6 - ClusteringManikandan MNo ratings yet
- UNIT-2: Introduction To Searching Methods in AIDocument46 pagesUNIT-2: Introduction To Searching Methods in AIminNo ratings yet
- Malacad Activity3Document8 pagesMalacad Activity3Regine MalacadNo ratings yet
- Solving Routing Problem Using Particle Swarm Optimization: Abhishek ToofaniDocument3 pagesSolving Routing Problem Using Particle Swarm Optimization: Abhishek Toofanig3120113No ratings yet
- Direction Based Heuristic For Pathfinding in Video Games: DirectionbasedheuristicforpathfindinginvideogamesDocument9 pagesDirection Based Heuristic For Pathfinding in Video Games: Directionbasedheuristicforpathfindinginvideogamesalisha_951023238No ratings yet
- ID3 AlgorithmDocument3 pagesID3 Algorithmsharad verma100% (1)
- Binary Search TreeDocument10 pagesBinary Search TreeMiral ElnakibNo ratings yet
- Lesson 7 Supervised Method (Decision Trees) AlgorithmsDocument12 pagesLesson 7 Supervised Method (Decision Trees) AlgorithmsVictor AjraebrillNo ratings yet
- Classification Algorithm in Data Mining: AnDocument6 pagesClassification Algorithm in Data Mining: AnMosaddek HossainNo ratings yet
- CS3491 - Artificial Intelligence and Machine LearningDocument34 pagesCS3491 - Artificial Intelligence and Machine Learningparanjothi karthikNo ratings yet
- Demisew Presentation 1Document14 pagesDemisew Presentation 1DemisewNo ratings yet
- Practice QuestionDocument7 pagesPractice QuestionTanush ReddyNo ratings yet
- Paper 1Document4 pagesPaper 1Akshay JaithaliaNo ratings yet
- A Path Finding Visualization Using A Star Algorithm and Dijkstra's AlgorithmDocument2 pagesA Path Finding Visualization Using A Star Algorithm and Dijkstra's AlgorithmEditor IJTSRD100% (1)
- Screenshot 2024-02-06 at 1.43.15 PMDocument66 pagesScreenshot 2024-02-06 at 1.43.15 PM1NC21IS062 Vishal H CNo ratings yet
- VolI 24feb2009Document91 pagesVolI 24feb2009momirc1No ratings yet
- Multi-Objective Optimization using Artificial Intelligence TechniquesFrom EverandMulti-Objective Optimization using Artificial Intelligence TechniquesNo ratings yet
- Modul Maximum FlowDocument6 pagesModul Maximum FlowNasywa SyifaNo ratings yet
- HW 10Document2 pagesHW 10skyward_soulNo ratings yet
- Assignment 1Document3 pagesAssignment 1shrinkhal03No ratings yet
- Optimization ProblemDocument13 pagesOptimization ProblemArie TrisnaNo ratings yet
- Question # 1: What Are The Differences Between Bellman Ford's and Dijkstra's Algorithms?Document12 pagesQuestion # 1: What Are The Differences Between Bellman Ford's and Dijkstra's Algorithms?Devil PrinceNo ratings yet
- Assignmnet 1Document6 pagesAssignmnet 1Muhammad UsamaNo ratings yet
- CSC373 Assignment 1 Solutions Spring 2012Document6 pagesCSC373 Assignment 1 Solutions Spring 2012yellowmoogNo ratings yet
- Champion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Document2 pagesChampion Sudoku: Week 23.: Sumet Juariyamark (THA) - Prasanna Seshadri (IND)Gafencu RubenNo ratings yet
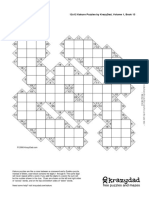
- Kakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Document9 pagesKakuro #1: 10X10 Kakuro Puzzles by Krazydad, Book 1Hye Min SeoNo ratings yet
- KD Kakuro 5x5 v4 s2 b097Document3 pagesKD Kakuro 5x5 v4 s2 b097RADU GABINo ratings yet
- WK 03Document2 pagesWK 03Ravi TejNo ratings yet
- Samurai Sudoku by Krazydad: Volume 1, Book 1 #1Document9 pagesSamurai Sudoku by Krazydad: Volume 1, Book 1 #1sonatta04No ratings yet
- 1 FordFulkersonDocument60 pages1 FordFulkersonIsrat Jahan Rain BorshaNo ratings yet
- KD Kakuro 12x12 s2 b013Document9 pagesKD Kakuro 12x12 s2 b013Dawn GateNo ratings yet
- 04 CME4422 MinimumSpanningTreeDocument49 pages04 CME4422 MinimumSpanningTreeSAMET KEMAL ÖZDEMİRNo ratings yet
- CSE 202: Design and Analysis of Algorithms: Instructor: Kamalika ChaudhuriDocument12 pagesCSE 202: Design and Analysis of Algorithms: Instructor: Kamalika ChaudhuriballechaseNo ratings yet
- MCA Spanning Tree CODE 212Document8 pagesMCA Spanning Tree CODE 212souvik CNo ratings yet
- Artificial Intelligence Project PresentationDocument34 pagesArtificial Intelligence Project Presentationilias ahmedNo ratings yet
- Daa R20 Unit 5Document13 pagesDaa R20 Unit 5A Raghava Chowdary maddipatiNo ratings yet
- Chapter 3 - Solving Problems by Searching ConciseDocument67 pagesChapter 3 - Solving Problems by Searching ConciseSamiNo ratings yet
- #95673 Difficulty: Easy #158001 Difficulty: EasyDocument100 pages#95673 Difficulty: Easy #158001 Difficulty: EasyFedericoNo ratings yet
- Bertossi 1987Document11 pagesBertossi 1987Benjamin NaulaNo ratings yet
- BrainBashers - Daily Kakuro - CombinationsDocument4 pagesBrainBashers - Daily Kakuro - Combinationszero_cool_oooNo ratings yet
- Celta Upper-Intermediate: Student ADocument2 pagesCelta Upper-Intermediate: Student AAna PadillaNo ratings yet
- Important Questions AlgoDocument10 pagesImportant Questions AlgoHarsha VarthiniNo ratings yet
- Lecture 37 (Vertex Cover and Binpacking)Document11 pagesLecture 37 (Vertex Cover and Binpacking)avinashNo ratings yet
- Analysis of Algorithms NP-Completeness: Courtesy To: University of NevadaDocument28 pagesAnalysis of Algorithms NP-Completeness: Courtesy To: University of NevadaAdrian Anam SifaatNo ratings yet
- Introduction To Graph Coloring - GeeksforGeeksDocument6 pagesIntroduction To Graph Coloring - GeeksforGeeksmaniking9346No ratings yet
- General 2 CSDocument6 pagesGeneral 2 CStommasobocconimailNo ratings yet