Download as docx, pdf, or txt
You might also like
- Dispersive Characteristics of Clay Soil by Double HydrometerDocument3 pagesDispersive Characteristics of Clay Soil by Double Hydrometerโก อู๋No ratings yet
- HjgfvyjfviDocument19 pagesHjgfvyjfvirene_brookeNo ratings yet
- Kley 99-TCNP-Andean Segmentation Causes and ConsequencesDocument20 pagesKley 99-TCNP-Andean Segmentation Causes and ConsequencesJuan Pablo Velásquez VidalNo ratings yet
- Kinematic Stability Analysis of Multi-Faced Rock Slopes in The HimalayasDocument4 pagesKinematic Stability Analysis of Multi-Faced Rock Slopes in The HimalayasSUFIYAN AHMADNo ratings yet
- Lineament Density From LandsatDocument12 pagesLineament Density From LandsatImam Muhajjir Fakhri PutraNo ratings yet
- Orthorhombic Fault-Fracture PatternsDocument20 pagesOrthorhombic Fault-Fracture PatternsCarlos Andrés Jiménez CardonaNo ratings yet
- BLTN10204Document14 pagesBLTN10204shangueleiNo ratings yet
- 2023 - Sasmal & BBhattacharya - Lithofacies and Depositional Environments of The Garubathan Alluvial Fan, North Bengal, IndiaDocument14 pages2023 - Sasmal & BBhattacharya - Lithofacies and Depositional Environments of The Garubathan Alluvial Fan, North Bengal, IndiaGabriel MarinsNo ratings yet
- Agostini Et Al 01Document4 pagesAgostini Et Al 01lolololoolololol999No ratings yet
- Syn-Convergent Exhumation and Lateral Extrusion in Continental Collision ZonesDocument29 pagesSyn-Convergent Exhumation and Lateral Extrusion in Continental Collision Zonesgeology1No ratings yet
- AaaaaDocument4 pagesAaaaaSourav DattaNo ratings yet
- Higueradaz2005 PDFDocument19 pagesHigueradaz2005 PDFAlonso GarcíaNo ratings yet
- Riller Oncken 03Document18 pagesRiller Oncken 03Camilo matta torresNo ratings yet
- Genesis of A New Slab Tear Fault in The Indo-Australian Plate, Offshore Northern Sumatra, Indian Ocean.Document8 pagesGenesis of A New Slab Tear Fault in The Indo-Australian Plate, Offshore Northern Sumatra, Indian Ocean.Basab MukhopadhyayNo ratings yet
- Present-Day Crustal Deformation Around Sagaing Fault, MyanmarDocument10 pagesPresent-Day Crustal Deformation Around Sagaing Fault, MyanmarNathan VincentNo ratings yet
- Meghraoui-Pondrelli AGDocument14 pagesMeghraoui-Pondrelli AGMak RamNo ratings yet
- 2012 Art Bssa BemDocument10 pages2012 Art Bssa BemPanji HoetomoNo ratings yet
- Earthquake Geology of Kashmir Basin and Its Implications For Future Large EarthquakesDocument10 pagesEarthquake Geology of Kashmir Basin and Its Implications For Future Large EarthquakesFrontiersNo ratings yet
- Crustal Motion in E-And SE-Asia From GPS MeasurementsDocument8 pagesCrustal Motion in E-And SE-Asia From GPS MeasurementsDja YusmanNo ratings yet
- Kinematics of The Northern Monagas Mountain FrontDocument4 pagesKinematics of The Northern Monagas Mountain FrontEdgar GonzalezNo ratings yet
- Tectonics - 2018 - Soumaya - Active Faulting Geometry and Stress Pattern Near Complex Strike Slip Systems Along The MaghrebDocument26 pagesTectonics - 2018 - Soumaya - Active Faulting Geometry and Stress Pattern Near Complex Strike Slip Systems Along The MaghrebRahma GhanemNo ratings yet
- Tavani, S., Storti, F., Fernández, O., Muñoz, J.a., Salvini, F., 2006. 3-D Deformation PatternDocument18 pagesTavani, S., Storti, F., Fernández, O., Muñoz, J.a., Salvini, F., 2006. 3-D Deformation PatternRodrigo Requelme BorjaNo ratings yet
- Landslide Hazard Mapping Based On Geological AttributesDocument20 pagesLandslide Hazard Mapping Based On Geological AttributesMohammad Ahmad HamidNo ratings yet
- 4 5 ZhangDocument8 pages4 5 ZhangNafisah YudhiartiNo ratings yet
- RFP 2000 YoungDocument18 pagesRFP 2000 YoungJosé Luis SánchezNo ratings yet
- Numerical Modeling of Rock Slopes in Siwalik Hills Near Manali Region: A Case StudyDocument21 pagesNumerical Modeling of Rock Slopes in Siwalik Hills Near Manali Region: A Case Studywidayat81No ratings yet
- Microbial Methane Turnover at Mud Volcanoes of The Gulf of CadizDocument31 pagesMicrobial Methane Turnover at Mud Volcanoes of The Gulf of Cadizlidmary2001No ratings yet
- Shear Zones of South IndiaDocument24 pagesShear Zones of South IndiaJishin jalaj0% (1)
- Gondwana Research: Md. Sho Fiqul Islam, Ryuichi Shinjo, J.R. KayalDocument10 pagesGondwana Research: Md. Sho Fiqul Islam, Ryuichi Shinjo, J.R. KayalSumitNo ratings yet
- Erin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Document2 pagesErin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Erin BethellNo ratings yet
- Lana Et Al 2008 PDFDocument16 pagesLana Et Al 2008 PDFJonathas OliveiraNo ratings yet
- Extensional Fault-Bend Folding and Synrift Deposition: An Example From The Central Sumatra Basin, IndonesiaDocument14 pagesExtensional Fault-Bend Folding and Synrift Deposition: An Example From The Central Sumatra Basin, IndonesiajihadspiritNo ratings yet
- Gephart 1994Document10 pagesGephart 1994jose espinozaNo ratings yet
- Flat Subduction Dynamics and Deformation of The South American Plate: Insights From Analog ModelingDocument19 pagesFlat Subduction Dynamics and Deformation of The South American Plate: Insights From Analog ModelingEber GamboaNo ratings yet
- 4 Seismic Behavior of Underground Structures and Site ResponseDocument7 pages4 Seismic Behavior of Underground Structures and Site ResponseDennis NarteNo ratings yet
- Asymmetric Crustal Structure of The Ultraslow Spreading Mohns RidgeDocument18 pagesAsymmetric Crustal Structure of The Ultraslow Spreading Mohns RidgeLea LejkosNo ratings yet
- 1.2 Oblique ConvergenceDocument18 pages1.2 Oblique ConvergenceStrike EagleNo ratings yet
- Gokceoglu2000 PDFDocument20 pagesGokceoglu2000 PDFHugo Van'stralenNo ratings yet
- Frontally Confined Versus Frontally Emergent Submarine Landslides A 3D Seismic CharacterisationDocument20 pagesFrontally Confined Versus Frontally Emergent Submarine Landslides A 3D Seismic CharacterisationA ANo ratings yet
- Conical Folds and Apparent Rotations in Paleomagnetism (A Case Study in The Southern Pyrenees)Document22 pagesConical Folds and Apparent Rotations in Paleomagnetism (A Case Study in The Southern Pyrenees)wilsonlopezgeoNo ratings yet
- McQuarrie 02Document16 pagesMcQuarrie 02Camilo matta torresNo ratings yet
- Tavani - 2008 - Stratigraphic Versus Structural Control On The Deformation PatternDocument18 pagesTavani - 2008 - Stratigraphic Versus Structural Control On The Deformation Patternjohan miguel sanchez sierraNo ratings yet
- Mitraetal 2010Document13 pagesMitraetal 2010kishan kumarNo ratings yet
- Revista de Geomorfologie Nr. 8 2006 12vespremeanuDocument14 pagesRevista de Geomorfologie Nr. 8 2006 12vespremeanuviopopNo ratings yet
- 9 wang2011-GJIDocument16 pages9 wang2011-GJIKo NgeNo ratings yet
- Spatial Probabilistic Modeling of Slope Failure Using An Integrated GISDocument14 pagesSpatial Probabilistic Modeling of Slope Failure Using An Integrated GISJan Joseph DidaNo ratings yet
- Arlegui & Simón 2001 Geometry and Distribution of Regional Joint Sets in A Non-Homogeneous Stress Field. Case Study in The Ebro Basin (Spain)Document17 pagesArlegui & Simón 2001 Geometry and Distribution of Regional Joint Sets in A Non-Homogeneous Stress Field. Case Study in The Ebro Basin (Spain)RICHARD REMY HUAYTA PACCONo ratings yet
- Thermochronometer Record of Central Andean Plateau Growth, Bolivia (19.5 °S)Document25 pagesThermochronometer Record of Central Andean Plateau Growth, Bolivia (19.5 °S)Willens OrtizNo ratings yet
- Comparing Thin and Thick-Skinned Thrust TectonicDocument14 pagesComparing Thin and Thick-Skinned Thrust TectonicPaul Heriver Gonzales PalaciosNo ratings yet
- 2012 Ul-Hadi Et AlDocument15 pages2012 Ul-Hadi Et AlRizwan YousafNo ratings yet
- FinalDocument13 pagesFinalBHABANINo ratings yet
- I A L R I LDocument22 pagesI A L R I LEvaNo ratings yet
- San Ramon FaultDocument68 pagesSan Ramon Faultmiguel fuentesNo ratings yet
- Pages From PSHA-of-Pakistan-4Document1 pagePages From PSHA-of-Pakistan-4AhMeD KhEdRNo ratings yet
- A Brief History of The Indo-Australian PlateDocument16 pagesA Brief History of The Indo-Australian Platejay batoNo ratings yet
- Tectonic Evolution of Tripura-Mizoram Fold Belt 1983Document9 pagesTectonic Evolution of Tripura-Mizoram Fold Belt 1983Sujit DasguptaNo ratings yet
- Structural Architecture of Chad Bornu BaDocument14 pagesStructural Architecture of Chad Bornu BaAbassyacoubouNo ratings yet
- Chapter 5 PDFDocument13 pagesChapter 5 PDFAhmed Magdy BeshrNo ratings yet
- Morphological Analysis of Hummocks in Debris AvalaDocument21 pagesMorphological Analysis of Hummocks in Debris Avalabambang kuatNo ratings yet
- Plate Boundaries and Natural HazardsFrom EverandPlate Boundaries and Natural HazardsJoao C. DuarteNo ratings yet
- Fault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureFrom EverandFault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureMarion Y. ThomasNo ratings yet
- NOMAC - Red Stone - Briding Program - Rev 03Document53 pagesNOMAC - Red Stone - Briding Program - Rev 03tlhalefangmogoengtermNo ratings yet
- International Journal of Pharmtech Research: Formulation of Aloe Juice (Aloe Vera (L) Burm.F.) Sheet Mask As Anti-AgingDocument10 pagesInternational Journal of Pharmtech Research: Formulation of Aloe Juice (Aloe Vera (L) Burm.F.) Sheet Mask As Anti-AgingAzri RahmadiNo ratings yet
- Sika Backing FillerDocument2 pagesSika Backing FillerErdenebileg SangidorjNo ratings yet
- Breach of ContractDocument26 pagesBreach of ContractSandeep100% (1)
- EntropyDocument21 pagesEntropycusgakungaNo ratings yet
- Solid State MCQ & CsaDocument10 pagesSolid State MCQ & Csashivansh upadhyay100% (1)
- VR8304 Intermittent Pilot Combination Gas Control: ApplicationDocument8 pagesVR8304 Intermittent Pilot Combination Gas Control: ApplicationGregorio Mata MartínezNo ratings yet
- Mobile Computing Multiple Choice Questions With Answers PDFDocument10 pagesMobile Computing Multiple Choice Questions With Answers PDFvikes singhNo ratings yet
- Low-Cost Arrival Assistance Service Vietnam AirportDocument9 pagesLow-Cost Arrival Assistance Service Vietnam AirportvietnamfasttrackserviceNo ratings yet
- Antenna GsDocument108 pagesAntenna GsGody100% (2)
- Numerical Methods For Partial Differential Equations: CAAM 452 Spring 2005 Instructor: Tim WarburtonDocument26 pagesNumerical Methods For Partial Differential Equations: CAAM 452 Spring 2005 Instructor: Tim WarburtonAqib SiddiqueNo ratings yet
- Mba Master Business Administration PDFDocument3 pagesMba Master Business Administration PDFdanielrubarajNo ratings yet
- 13 565Document4 pages13 565Nabeel SheikhNo ratings yet
- The Best Classical Music For New YearDocument10 pagesThe Best Classical Music For New Yeardane franolicNo ratings yet
- TATA MOTORS STP AnalysisDocument7 pagesTATA MOTORS STP AnalysisBharat RachuriNo ratings yet
- Data Science HindiDocument29 pagesData Science HindiSyed Bilal Armaan100% (2)
- Session 2Document4 pagesSession 2vijayakumar100% (1)
- Parle GDocument26 pagesParle GNikhil Vithaldas Kadam100% (1)
- Kristian M. Dinapo: ObjectiveDocument2 pagesKristian M. Dinapo: ObjectiveX.oFlawlesso.XNo ratings yet
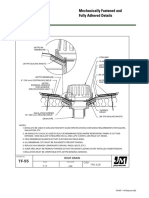
- JM Mechanically Fastened and Adhered Details UltraGard TPO Roof Drain New Construction Detail Drawing B18270Document1 pageJM Mechanically Fastened and Adhered Details UltraGard TPO Roof Drain New Construction Detail Drawing B18270michael jan tubongbanuaNo ratings yet
- ENVS 532: DR Assad Al-Thukair Associate ProfessorDocument16 pagesENVS 532: DR Assad Al-Thukair Associate ProfessorAbu Muhsin Al NgapakyNo ratings yet
- Product Sheet Damen FCS 5009Document2 pagesProduct Sheet Damen FCS 5009Juan ResendizNo ratings yet
- Mechanical Vibrations by V.P. Singh PDFDocument131 pagesMechanical Vibrations by V.P. Singh PDFmayilsvhec70% (10)
- Mfe Getting StartedDocument50 pagesMfe Getting StartedDinesh KNo ratings yet
- INDIA Gherkin enDocument6 pagesINDIA Gherkin enmichelbgggNo ratings yet
- GN No 333 Public Procurement (Amendment) Regulations, 2016Document45 pagesGN No 333 Public Procurement (Amendment) Regulations, 2016imran hameerNo ratings yet
- MLOG GX CMXA75 v4 0 322985a0 UM-ENDocument311 pagesMLOG GX CMXA75 v4 0 322985a0 UM-ENjamiekuangNo ratings yet
- CAPENTRAINDocument2 pagesCAPENTRAINMedrar TareqNo ratings yet
- Instruction Book Manual de Instrucciones Livre D'InstructionsDocument79 pagesInstruction Book Manual de Instrucciones Livre D'InstructionsWilfrido RosadoNo ratings yet