Download as pdf or txt
You might also like
- Paper 1608 CIRED2019Document5 pagesPaper 1608 CIRED2019romerogordonNo ratings yet
- 1969 Rockefeller - Fault Protection With A Digital Computer PDFDocument27 pages1969 Rockefeller - Fault Protection With A Digital Computer PDFOmar Chayña VelásquezNo ratings yet
- Implementation Fully-Digital: Lithium-Ion BatteryDocument4 pagesImplementation Fully-Digital: Lithium-Ion Batteryarief setyo nugrohoNo ratings yet
- Smart Storage For Active Distribution Networks. Estimation and Measurement SolutionsDocument6 pagesSmart Storage For Active Distribution Networks. Estimation and Measurement SolutionsmartinmunozbaNo ratings yet
- PLC Based Motor Power Factor ControllerDocument7 pagesPLC Based Motor Power Factor ControllerLaiba GulNo ratings yet
- Effective Two-Terminal Numerical Algorithm For OveDocument9 pagesEffective Two-Terminal Numerical Algorithm For OveAbdallah AmroNo ratings yet
- Processor in The Loop Test For Algorithms Designed To Control Power Electronics Converters Used in Grid Connected Photovoltaic SystemDocument19 pagesProcessor in The Loop Test For Algorithms Designed To Control Power Electronics Converters Used in Grid Connected Photovoltaic SystemDjamila RekiouaNo ratings yet
- Pub 9 Implementation of Grid-Connected Photovoltaic System With Power Factor Control and Islanding DetectionDocument4 pagesPub 9 Implementation of Grid-Connected Photovoltaic System With Power Factor Control and Islanding Detectionatam azerNo ratings yet
- A Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode ComponentsDocument11 pagesA Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode Componentsmalini72No ratings yet
- Synchronism-Check Application Over A Wide-Area Network: Mercury Schweitzer Engineering Laboratories, IncDocument8 pagesSynchronism-Check Application Over A Wide-Area Network: Mercury Schweitzer Engineering Laboratories, IncEngr Fahimuddin QureshiNo ratings yet
- Wireless Battery Charger ThesisDocument8 pagesWireless Battery Charger ThesisBestOnlinePaperWritingServiceUK100% (2)
- Wireless Charging Research Paper PDFDocument8 pagesWireless Charging Research Paper PDFj0b0lovegim3100% (1)
- 2023 J Adaptive Control Technique For Portable Solar Powered EV Charging Adapter To Operate in Remote LocationDocument11 pages2023 J Adaptive Control Technique For Portable Solar Powered EV Charging Adapter To Operate in Remote Locationfrankienstein0780No ratings yet
- Remediation of Old Substations For Arc Flash Hazard-NOTA TECNICADocument10 pagesRemediation of Old Substations For Arc Flash Hazard-NOTA TECNICAEdgardo Kat ReyesNo ratings yet
- Power and Battery Plant CoordinationDocument6 pagesPower and Battery Plant Coordinationdeepthik27No ratings yet
- DSP-Based Probabilistic Fuzzy Neural Network Control For Li-Ion Battery ChargerDocument13 pagesDSP-Based Probabilistic Fuzzy Neural Network Control For Li-Ion Battery ChargerElroy FransiskusNo ratings yet
- Izadian 2010Document4 pagesIzadian 2010fatihaNo ratings yet
- Efficient Charging of Battery and Production of PowerDocument7 pagesEfficient Charging of Battery and Production of Powermohan venkatNo ratings yet
- Vehicular Integration of Wireless Power Transfer Systems and Hardware Interoperability Case StudiesDocument12 pagesVehicular Integration of Wireless Power Transfer Systems and Hardware Interoperability Case Studies19-215 B PAVAN KUMARNo ratings yet
- Electrical Safety Offshore PDFDocument21 pagesElectrical Safety Offshore PDFP Venkata SureshNo ratings yet
- A 400-nW 19.5-fJ/Conversion-Step 8-ENOB 80-kS/s SAR ADC in 0.18-M CmosDocument5 pagesA 400-nW 19.5-fJ/Conversion-Step 8-ENOB 80-kS/s SAR ADC in 0.18-M CmosSuraj Kumar PrustyNo ratings yet
- MarkDocument3 pagesMarkDr. Jagabar Sathik Mohammed AliNo ratings yet
- RasGas Plant Harmonics Study-Final ReportDocument24 pagesRasGas Plant Harmonics Study-Final Reportdaniel_silaban0% (1)
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- Network MobilesDocument4 pagesNetwork MobilesAJER JOURNALNo ratings yet
- IEEE PF Correction Using 8085Document4 pagesIEEE PF Correction Using 8085Shivanshu GoswamiNo ratings yet
- (2010) Control Strategy of A Multi-Port, Grid Connected, Direct-DCDocument5 pages(2010) Control Strategy of A Multi-Port, Grid Connected, Direct-DCabc1231234454252452342No ratings yet
- State Estimation and Total Transfer Capability Calculation in Deregulated Power SystemDocument5 pagesState Estimation and Total Transfer Capability Calculation in Deregulated Power SystemawolNo ratings yet
- Simple Rules For Solving Power Quality MysteriesDocument12 pagesSimple Rules For Solving Power Quality MysteriesgashawteNo ratings yet
- Itees Feb 2021 JPDocument18 pagesItees Feb 2021 JPDr O H GuptaNo ratings yet
- A New Differential Protection Scheme For Busbar Considering CT Saturation EffectDocument4 pagesA New Differential Protection Scheme For Busbar Considering CT Saturation EffectMuruganNo ratings yet
- Uni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureDocument7 pagesUni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureChaibHabibNo ratings yet
- SFCC For The Smart GridDocument4 pagesSFCC For The Smart GridAkhilesh PanwarNo ratings yet
- Constant Current Fuzzy Logic Controller For Grid Connected Electric Vehicle ChargingDocument6 pagesConstant Current Fuzzy Logic Controller For Grid Connected Electric Vehicle ChargingNik UrlaubNo ratings yet
- A Current Consumption Measurement Approach For FPGA-Based Embedded SystemsDocument8 pagesA Current Consumption Measurement Approach For FPGA-Based Embedded SystemsRaghul RamasamyNo ratings yet
- TP (Muhammad Nurazli Bin Mohd Dali 2016690508)Document8 pagesTP (Muhammad Nurazli Bin Mohd Dali 2016690508)azliNo ratings yet
- New Design of Intelligent Load Shedding Algorithm Based On Critical Line Overloads To Reduce Network Cascading Failure RisksDocument15 pagesNew Design of Intelligent Load Shedding Algorithm Based On Critical Line Overloads To Reduce Network Cascading Failure RisksNirmal mehtaNo ratings yet
- Inverter Based DG Fault CalculationDocument13 pagesInverter Based DG Fault CalculationhassanNo ratings yet
- Tracking The Maximum Power Point of PV Array by Sliding Mode ControlDocument13 pagesTracking The Maximum Power Point of PV Array by Sliding Mode ControlBOOPATHI YADAVNo ratings yet
- Improved Three Phase Single Phase Torque Cancellation IEEEAccess2021Document10 pagesImproved Three Phase Single Phase Torque Cancellation IEEEAccess2021DEBARATI DAMNo ratings yet
- Novel Differential Protection Approach of UHV AC Transmission Lines Based On Tellegen S Quasi-Powe 3043550Document10 pagesNovel Differential Protection Approach of UHV AC Transmission Lines Based On Tellegen S Quasi-Powe 3043550critljusnlNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- EV Method PVDocument12 pagesEV Method PVV S R PAVAN KUMAR NEELINo ratings yet
- A 3.4-Pj Feram-Enabled D Flip-Flop In 0.13-Μm Cmos For Nonvolatile Processing In Digital SystemsDocument28 pagesA 3.4-Pj Feram-Enabled D Flip-Flop In 0.13-Μm Cmos For Nonvolatile Processing In Digital SystemsaanbalanNo ratings yet
- A - Cost-Effective - Method - For - PV - Module - Field - Test - Using - An - Electronic - Load (2) SO PARA CONSTAR NAS REFERENCIASDocument4 pagesA - Cost-Effective - Method - For - PV - Module - Field - Test - Using - An - Electronic - Load (2) SO PARA CONSTAR NAS REFERENCIASLuis KolbaNo ratings yet
- Power Quality Assessment Using Signal Periodicity Independent Algorithms - A Shipboard Microgrid Case StudyDocument11 pagesPower Quality Assessment Using Signal Periodicity Independent Algorithms - A Shipboard Microgrid Case StudyPengjing WangNo ratings yet
- An Analysis and Modeling of Grid Connected Multiple-Pole Multilevel Unity Power Factor RectifierDocument7 pagesAn Analysis and Modeling of Grid Connected Multiple-Pole Multilevel Unity Power Factor RectifierEditor IJTSRDNo ratings yet
- Improved Power Transformer Protection Using Numerical RelaysDocument17 pagesImproved Power Transformer Protection Using Numerical RelayssegamegaNo ratings yet
- Efficient Applications of Bus Transfer Schemes: Craig Wester Terrence SmithDocument8 pagesEfficient Applications of Bus Transfer Schemes: Craig Wester Terrence SmithAngelica Escobar MorenoNo ratings yet
- Dusza Etal 2012aDocument5 pagesDusza Etal 2012aroshankojuNo ratings yet
- Low Power ThesisDocument6 pagesLow Power Thesistiffanybarbermobile100% (2)
- Reducing Outage Durations Through Improved Protection and Autorestoration in Distribution Substations. WG-K3 MembersDocument23 pagesReducing Outage Durations Through Improved Protection and Autorestoration in Distribution Substations. WG-K3 Membersbkalatus1No ratings yet
- Residual Flux Mitigation of Protective Current Transformers Used in An Autoreclosing SchemeDocument9 pagesResidual Flux Mitigation of Protective Current Transformers Used in An Autoreclosing SchemeAlberto MedeirosNo ratings yet
- Algorithm For Digital Low ImpedanceDocument8 pagesAlgorithm For Digital Low ImpedanceJanen AhujaNo ratings yet
- A Review On Fault Detection and Allocation Techniques in Power SystemDocument4 pagesA Review On Fault Detection and Allocation Techniques in Power SystemSatyendra Pratap SinghNo ratings yet
- Controlled Switching of Series CompensatedDocument11 pagesControlled Switching of Series CompensatedSultan Al-SaiariNo ratings yet
- Management of Available Power in Substation Transformers Based On ReliabilityDocument5 pagesManagement of Available Power in Substation Transformers Based On ReliabilityrajfabNo ratings yet
- ZERO CrossingDocument6 pagesZERO CrossingjoseNo ratings yet
- Design and Implementation of An Over-Current Relay For The Power Electronic-Based Converters ProtectionDocument6 pagesDesign and Implementation of An Over-Current Relay For The Power Electronic-Based Converters ProtectionboucharebNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- 8-Cloth Store Management SystemDocument10 pages8-Cloth Store Management SystembittuwarvadeNo ratings yet
- User Manual IBOT Mini V3Document44 pagesUser Manual IBOT Mini V3Soumya PandeyNo ratings yet
- JBL Eon715 Spec SheetDocument3 pagesJBL Eon715 Spec SheetFrance BonabonNo ratings yet
- Public-Private-Hybrid CCDocument28 pagesPublic-Private-Hybrid CCharry HarithaNo ratings yet
- Analisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosDocument19 pagesAnalisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosNoltujuh Nollapan (Congyang)No ratings yet
- Assemblers: - Two Functions: - Some Features: - Other FeaturesDocument37 pagesAssemblers: - Two Functions: - Some Features: - Other FeaturesSharon ben aharonNo ratings yet
- Windows7 PUFF21-Tutorial 2013 EnglishDocument121 pagesWindows7 PUFF21-Tutorial 2013 EnglishtalletalleNo ratings yet
- Mind Map For NetworksDocument1 pageMind Map For NetworksUday ShreshthNo ratings yet
- Schneider Electric - Logic-Controller-Modicon-M241 - TM241CEC24TDocument16 pagesSchneider Electric - Logic-Controller-Modicon-M241 - TM241CEC24TflaviosistemasNo ratings yet
- PDCDocument2 pagesPDCSyed Wyle MustafaNo ratings yet
- MLX10407 Datasheet MelexisDocument10 pagesMLX10407 Datasheet Melexisrevisione turbine turbo turbocompressoriNo ratings yet
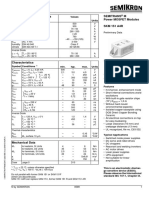
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocument5 pagesAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Business Objects and Basis Roles - SAP QIMDocument58 pagesBusiness Objects and Basis Roles - SAP QIMRohan PandeNo ratings yet
- Multimedia Systems TutorialDocument8 pagesMultimedia Systems TutorialAbdul HameedNo ratings yet
- Shortcut Keys For CCCDocument4 pagesShortcut Keys For CCC2023.copabhavanapawarNo ratings yet
- FAANGPath Simple TemplateDocument2 pagesFAANGPath Simple TemplateHarshit KumarNo ratings yet
- Introduction To Embedded Systems Session - IiDocument14 pagesIntroduction To Embedded Systems Session - Iibalajibs203285No ratings yet
- Automated Testing ToolDocument20 pagesAutomated Testing TooltejaswiNo ratings yet
- A33003 DatasheetDocument90 pagesA33003 DatasheetLuis Fernando NavarroNo ratings yet
- USBX User GuideDocument262 pagesUSBX User GuideHarshil Sheth100% (1)
- Instructions: Dx100 OptionsDocument29 pagesInstructions: Dx100 OptionsTran LeNo ratings yet
- PPL Unit 1 NotesDocument31 pagesPPL Unit 1 NotesIndhu RithikNo ratings yet
- 8086 Programs-Semester 4Document40 pages8086 Programs-Semester 4Shashank M ChanmalNo ratings yet
- H.264 Network Digital Video Recorder User ManualDocument98 pagesH.264 Network Digital Video Recorder User Manualminhtutran1983No ratings yet
- Felix's ResumeDocument4 pagesFelix's ResumeMedara MosesNo ratings yet
- Move Tables, Indexes and Lobs To Another TablespaceDocument3 pagesMove Tables, Indexes and Lobs To Another TablespaceJabras GuppiesNo ratings yet
- Dcof BitDocument3 pagesDcof BitMuhammed ShazimNo ratings yet
- Coma Lab (203124210)Document31 pagesComa Lab (203124210)KrishilNo ratings yet
- My Courses: Home UGRD-IT6300-2113T Week 14: Final Examination Final ExamDocument26 pagesMy Courses: Home UGRD-IT6300-2113T Week 14: Final Examination Final ExamMicah TanhuecoNo ratings yet