Download as docx, pdf, or txt
You might also like
- Ibs Sys Address: INTERBUS AddressingDocument24 pagesIbs Sys Address: INTERBUS AddressingVasil StoyanovNo ratings yet
- Computer System Architecture Lab Report 5Document5 pagesComputer System Architecture Lab Report 5290 874Sheikh hasanNo ratings yet
- UNIT 3 MechatronicsDocument38 pagesUNIT 3 MechatronicsMuthuvel M67% (6)
- Microprocessor8085 BestDocument145 pagesMicroprocessor8085 BestDebashis TaraiNo ratings yet
- 8085 Microprocessor - Block DiagramDocument5 pages8085 Microprocessor - Block DiagramShreyash ShindeNo ratings yet
- Microprocessors Architecture NotesDocument18 pagesMicroprocessors Architecture Notesenockkibet800No ratings yet
- MicroprocessorsDocument11 pagesMicroprocessors158 AshleshaNo ratings yet
- MPA UNIT 1 and 2Document48 pagesMPA UNIT 1 and 2Shiva Krishna KamjulaNo ratings yet
- 1 8085 Microprocessor ArchitectureDocument7 pages1 8085 Microprocessor Architecturejosrichman75No ratings yet
- 8085 Microprocessor - Functional Units: AccumulatorDocument3 pages8085 Microprocessor - Functional Units: AccumulatorANKIT SHARMANo ratings yet
- MP & MC Micro Doc-20240520-Wa0000Document82 pagesMP & MC Micro Doc-20240520-Wa0000Deba Comedy ClubNo ratings yet
- Intel 8085 ArchitectureDocument8 pagesIntel 8085 ArchitectureAravind VJNo ratings yet
- Microprocessor - 8085 ArchitectureDocument4 pagesMicroprocessor - 8085 ArchitectureLithika RameshNo ratings yet
- 8085 MaterialDocument12 pages8085 MaterialsameerNo ratings yet
- M4 Yash AllabadiDocument6 pagesM4 Yash Allabadidegijon661No ratings yet
- UNIT I NotesDocument31 pagesUNIT I Noteskanishkasp2006No ratings yet
- Fundamentals of Microprocessor 01Document35 pagesFundamentals of Microprocessor 01Antony Chacha GatiNo ratings yet
- Unit Iii MicroprocessorsDocument31 pagesUnit Iii MicroprocessorssubendNo ratings yet
- Microprocessor Lecture 1Document4 pagesMicroprocessor Lecture 1rspahlobNo ratings yet
- 8085 MicroprocessorDocument25 pages8085 Microprocessorprofessor2062No ratings yet
- 8085 MicroprocessorDocument20 pages8085 Microprocessorjeravi84No ratings yet
- microprocessor8085pptcomplete-170518063501Document111 pagesmicroprocessor8085pptcomplete-170518063501Meet JOGANINo ratings yet
- EE309 MP Mod1 Ktunotes - inDocument17 pagesEE309 MP Mod1 Ktunotes - inDivya KrishnanNo ratings yet
- UNIT-4: 8085 MicroprocessorDocument28 pagesUNIT-4: 8085 MicroprocessorMuthuvel MNo ratings yet
- SDM Module IDocument28 pagesSDM Module IKiran KrishnanNo ratings yet
- CN 320: Microprocessor and Microcontroller SystemsDocument40 pagesCN 320: Microprocessor and Microcontroller SystemsAlango Jr TzNo ratings yet
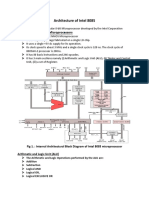
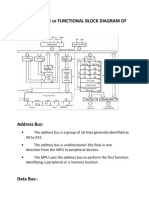
- Architechture or Functional Block Diagram of 8085Document15 pagesArchitechture or Functional Block Diagram of 8085Rawat RajatNo ratings yet
- Architecture Diagram of 8085 MicroprocessorDocument4 pagesArchitecture Diagram of 8085 MicroprocessorbhatiaharryjassiNo ratings yet
- 8085 MicroprocessorDocument13 pages8085 MicroprocessorSajid Akram100% (1)
- MPDocument34 pagesMPAbhinandan JainNo ratings yet
- 8085 Microprocessor: Pin Configuration, ArchitectureDocument26 pages8085 Microprocessor: Pin Configuration, ArchitectureAnitha Kumari SivathanuNo ratings yet
- Unit - VI DEDocument60 pagesUnit - VI DErahulbixt23No ratings yet
- Microprocessors and MicrocontrollersDocument22 pagesMicroprocessors and Microcontrollers6012 ANILNo ratings yet
- Introduction To Microprocessor and Microcomputer ArchitectureDocument6 pagesIntroduction To Microprocessor and Microcomputer Architecturesri vatsaNo ratings yet
- Microprocessor 8085 ArchitectureDocument8 pagesMicroprocessor 8085 ArchitectureHarjot KaurNo ratings yet
- Architechture of 8085Document4 pagesArchitechture of 8085udit_mca_blyNo ratings yet
- Microcontrollers and Systems Lesson3 Microprocessor 8085Document9 pagesMicrocontrollers and Systems Lesson3 Microprocessor 8085Jean de Dieu NGUIMFACK NDONGMONo ratings yet
- Pin Configuration, ArchitectureDocument26 pagesPin Configuration, ArchitectureAnitha Kumari SivathanuNo ratings yet
- An Over View of 8085Document12 pagesAn Over View of 8085nskprasad89No ratings yet
- CA231-Microprocessors and Its Applications Short AnswersDocument15 pagesCA231-Microprocessors and Its Applications Short Answersapi-3770232100% (3)
- MechantronicsDocument11 pagesMechantronicsrajasree Marine Engg-Asst ProfNo ratings yet
- Unit I PDFDocument25 pagesUnit I PDFSomnath2014No ratings yet
- Unit-I: 8-Bit MicroprocessorsDocument55 pagesUnit-I: 8-Bit MicroprocessorsAASTHA KIETNo ratings yet
- Prepared by NITHIN JOHN: Module-1Document15 pagesPrepared by NITHIN JOHN: Module-1Nithin JohnNo ratings yet
- Introduction To Microprocessor 8085Document23 pagesIntroduction To Microprocessor 8085GousAttarNo ratings yet
- Unit I The 8086 MicroprocessorDocument21 pagesUnit I The 8086 Microprocessor16211a0470100% (1)
- L-3 8 Bits MicroprocessorDocument12 pagesL-3 8 Bits Microprocessormuhamed.abdelhamid16No ratings yet
- Micrprocessor Notes 2023Document18 pagesMicrprocessor Notes 2023GautamNo ratings yet
- MPMC - Unit 1 - 8085 ArchitectureDocument17 pagesMPMC - Unit 1 - 8085 ArchitectureWickNo ratings yet
- Blockdiagramof 8085Document40 pagesBlockdiagramof 8085Akhil NameirakpamNo ratings yet
- Microprocessor NotesDocument60 pagesMicroprocessor NotesVijay KumarNo ratings yet
- MPI GTU Study Material E-Notes Unit-3 13052022115048AMDocument15 pagesMPI GTU Study Material E-Notes Unit-3 13052022115048AMmailsender787No ratings yet
- 8086 PDFDocument261 pages8086 PDFndeshmukh83No ratings yet
- Name-Deepak Kumar Verma Branch-Electrical Engineering ROLL NO.-2017-E-43 REG. NO.-17103132042 Subject-MicroprocessorDocument15 pagesName-Deepak Kumar Verma Branch-Electrical Engineering ROLL NO.-2017-E-43 REG. NO.-17103132042 Subject-MicroprocessorKUNDAN KUMAR VERMANo ratings yet
- FMM Unit-1Document28 pagesFMM Unit-1CS ENo ratings yet
- Unit - II Microprocessors-and-Microcontrollers - CompressedDocument22 pagesUnit - II Microprocessors-and-Microcontrollers - CompressedVishalNo ratings yet
- The 8085 Microprocessor ArchitectureDocument12 pagesThe 8085 Microprocessor ArchitectureBernard MunyithyaNo ratings yet
- Ee6502 Microprocessors and MicrocontrollersDocument97 pagesEe6502 Microprocessors and MicrocontrollersAnbalagan Guru0% (1)
- Microprocessors and MicrocontrollersDocument220 pagesMicroprocessors and MicrocontrollersPooja SinghNo ratings yet
- Computer Organization Architecture and Assembly Language File/8085 FileDocument32 pagesComputer Organization Architecture and Assembly Language File/8085 FileGarimaNo ratings yet
- Microprocessors and Microcontrollers Answer KeyDocument14 pagesMicroprocessors and Microcontrollers Answer KeyselvaNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- BabelnewDocument98 pagesBabelnewkhannawazNo ratings yet
- Chapter 1: Introduction To Software Development: Program Design P. JuliffDocument21 pagesChapter 1: Introduction To Software Development: Program Design P. JuliffrohanNo ratings yet
- Fortran 77 BookDocument211 pagesFortran 77 Bookjohn effiongNo ratings yet
- Chapters 1 and 2: An Overview of Computers and Programming, Elements of High-Quality ProgramsDocument15 pagesChapters 1 and 2: An Overview of Computers and Programming, Elements of High-Quality ProgramsMbaya JoelNo ratings yet
- Corrected Cad Lab ManualDocument42 pagesCorrected Cad Lab ManualSanjithRNairNo ratings yet
- MotherboardDocument18 pagesMotherboardNatha lieNo ratings yet
- Building and Assembling A Computer SystemDocument72 pagesBuilding and Assembling A Computer SystemAdebisi EmmanelNo ratings yet
- Lecture 16 PDFDocument11 pagesLecture 16 PDFattiqueNo ratings yet
- DILIMAN MscsDocument5 pagesDILIMAN MscsngphamNo ratings yet
- SY8125 User ManualDocument65 pagesSY8125 User ManualM Favio Palacios SolórzanoNo ratings yet
- E-Fim OTNM2000 Element Management System Operation GuideDocument614 pagesE-Fim OTNM2000 Element Management System Operation GuidePrabin Mali86% (7)
- Computer Systems ServicingDocument15 pagesComputer Systems ServicingJaime LaycanoNo ratings yet
- Chap 1Document9 pagesChap 1Arafat MorshedNo ratings yet
- DDDDDocument5 pagesDDDDJohn Zedrick IglesiaNo ratings yet
- Order of Operations - Daily Lesson PlansDocument11 pagesOrder of Operations - Daily Lesson Plansapi-256952815100% (1)
- CBLX3103 Introduction To LINUX - SG (V Aug17) Bookmark PDFDocument71 pagesCBLX3103 Introduction To LINUX - SG (V Aug17) Bookmark PDFAbu NaurahNo ratings yet
- Artigo - Medium - 'Software As Ideology' (2016)Document11 pagesArtigo - Medium - 'Software As Ideology' (2016)TingoNo ratings yet
- ICT Grade 11 Teacher GuideDocument61 pagesICT Grade 11 Teacher GuideBubu ZarNo ratings yet
- Mde 5339CDocument76 pagesMde 5339CJose Miguel Suarez SilvaNo ratings yet
- Universal Logic Elements Constructed On The Turing TumbleDocument9 pagesUniversal Logic Elements Constructed On The Turing Tumblepeng liNo ratings yet
- 2071-02-15 Computer Operator Question Key CDocument4 pages2071-02-15 Computer Operator Question Key CKanaj Nam100% (1)
- Internal Parts of S.UDocument23 pagesInternal Parts of S.UMichael ZuñigaNo ratings yet
- CAD Flatbed: User's ManualDocument11 pagesCAD Flatbed: User's ManualseppeNo ratings yet
- English For Computer Students Sem IIDocument51 pagesEnglish For Computer Students Sem IICan whardana saragih100% (1)
- Republic Act No. 8436Document74 pagesRepublic Act No. 8436Kirby HipolitoNo ratings yet
- Scope of Computer ScienceDocument2 pagesScope of Computer ScienceAnuvav MishraNo ratings yet
- IT Application in BusinessDocument24 pagesIT Application in Businesskodnya.meenuNo ratings yet
- At Home:: Why Is It Required To Be Tech SavyDocument4 pagesAt Home:: Why Is It Required To Be Tech SavyBabsNo ratings yet