Download as pdf or txt
You might also like
- PID Controller Lab Exp5Document3 pagesPID Controller Lab Exp5Sanjoy Pathak100% (2)
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignDocument15 pagesControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignSengottu VelusamyNo ratings yet
- M&E ReportDocument14 pagesM&E ReportMuhammad Zuhairi IINo ratings yet
- 1.pipeline Risk Assessment Definitive Approach and Its Role in Risk ManagementDocument17 pages1.pipeline Risk Assessment Definitive Approach and Its Role in Risk Managementhendry_hdw100% (1)
- Lab Report CS 4Document8 pagesLab Report CS 4ubaidNo ratings yet
- Lab 9 AaaDocument5 pagesLab 9 AaaAsad Mehmood SattiiNo ratings yet
- Munneb Control Open endedDocument7 pagesMunneb Control Open endedMuneeb AhmadNo ratings yet
- Task #1: - : Muhammad Azeem 17K-2358 Fcs Lab 10Document5 pagesTask #1: - : Muhammad Azeem 17K-2358 Fcs Lab 10Aezone KhanNo ratings yet
- Lab 09 PDFDocument8 pagesLab 09 PDFAbdul Rehman AfzalNo ratings yet
- Introduction: PID Controller Design: TF Step Pid Feedback Pidtool PidtuneDocument17 pagesIntroduction: PID Controller Design: TF Step Pid Feedback Pidtool PidtuneeduardoguidoNo ratings yet
- IntroductionDocument51 pagesIntroductionAlex NegulescuNo ratings yet
- Tci Practica 8Document17 pagesTci Practica 8Iván Méndez FloresNo ratings yet
- Assignment 2 - Adv CTL 2020Document7 pagesAssignment 2 - Adv CTL 2020Thành Trung Nguyễn QuáchNo ratings yet
- Lab4 UpdatedDocument3 pagesLab4 UpdatedSekar PrasetyaNo ratings yet
- Control System Design For An Autonomous Mobile Robot: Sathish K ShanmugasundaramDocument36 pagesControl System Design For An Autonomous Mobile Robot: Sathish K Shanmugasundaramteknikpembakaran2013No ratings yet
- Introduction To PIDDocument16 pagesIntroduction To PIDjocianvefNo ratings yet
- PID Controller DesignDocument14 pagesPID Controller DesignWashington Luiz Leite SousaNo ratings yet
- A Simple PID Controller With Adaptive Parameter in A DsPICDocument5 pagesA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifNo ratings yet
- Rajshahi University of Engineering and Technology: Heaven's Light Is Our GuideDocument7 pagesRajshahi University of Engineering and Technology: Heaven's Light Is Our GuideMaksidur Rahman FahimNo ratings yet
- Assessment Report: ObjectiveDocument12 pagesAssessment Report: Objectivef158354 Muhammad HaseebNo ratings yet
- Identification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using MatlabDocument51 pagesIdentification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using Matlabjagateesan50% (2)
- Control System Engineering ©dept. of Ete, CuetDocument12 pagesControl System Engineering ©dept. of Ete, Cuetu2008003No ratings yet
- Pid Control ExperimentDocument15 pagesPid Control Experimentazhar3303No ratings yet
- PID Control System Analysis and DesignDocument48 pagesPID Control System Analysis and DesignAsghar AliNo ratings yet
- PID and Refinery TutorialDocument20 pagesPID and Refinery TutorialSatpal SinghNo ratings yet
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocument7 pagesTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Lab11 - AutotuningDocument26 pagesLab11 - AutotuningEng. Ebrahim A. AlrohmiNo ratings yet
- Lab11 - Autotuning PDFDocument26 pagesLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiNo ratings yet
- Tutorial 07Document30 pagesTutorial 07megldNo ratings yet
- Danial ReportDocument11 pagesDanial ReportImran AliNo ratings yet
- Introduction: PID Controller DesignDocument23 pagesIntroduction: PID Controller DesignRahul DubeyNo ratings yet
- Lab Report 3: Labs 6 & 7 MEM459/MEM540-Control Applications of DSPDocument25 pagesLab Report 3: Labs 6 & 7 MEM459/MEM540-Control Applications of DSPBryan Badillo RamosNo ratings yet
- Experiment 9Document9 pagesExperiment 9Ali AhmadNo ratings yet
- DC Motor Speed: Digital Controller Design: Eng Mohamed DobaDocument20 pagesDC Motor Speed: Digital Controller Design: Eng Mohamed DobaEng. Ibrahim Abdullah AlruhmiNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- Assignment Details: 1.1 Coursework ObjectivesDocument4 pagesAssignment Details: 1.1 Coursework ObjectivessyedshanNo ratings yet
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDocument4 pagesAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoNo ratings yet
- Practical Issues in PID Implementation: CL-417 Process Control Prof. Kannan M. MoudgalyaDocument25 pagesPractical Issues in PID Implementation: CL-417 Process Control Prof. Kannan M. MoudgalyaYsgn MysgnNo ratings yet
- Lab 7 Pid ControlDocument6 pagesLab 7 Pid ControlFatin FarehahNo ratings yet
- Lab 3 - 4 ScilabDocument8 pagesLab 3 - 4 ScilabIq'wan RodzaiNo ratings yet
- Digital Controlled System Lab Manual PDFDocument43 pagesDigital Controlled System Lab Manual PDFsoumencha100% (3)
- CTM - PID TutorialDocument9 pagesCTM - PID TutorialStanley CesarNo ratings yet
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocument39 pagesPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNo ratings yet
- CS LabReport 1Document9 pagesCS LabReport 1Muhammad AfzaalNo ratings yet
- 15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller TuningDocument5 pages15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller Tuningahmed.almohammedNo ratings yet
- AVR221 Discrete PID ControllerDocument10 pagesAVR221 Discrete PID ControllerSadık KorkmazNo ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- NI Tutorial 6440Document7 pagesNI Tutorial 6440mahi9892No ratings yet
- Generalidades PIDDocument3 pagesGeneralidades PIDJeferson GonzálezNo ratings yet
- Advanced PID Controller ImplementationDocument13 pagesAdvanced PID Controller Implementationlizhi0007100% (1)
- Design of Pid Controller For PLC: J. Paulusová, L. KörösiDocument8 pagesDesign of Pid Controller For PLC: J. Paulusová, L. Körösiankit407No ratings yet
- EE 340: Control Systems: Lab 5 P, PI and PID ControllersDocument11 pagesEE 340: Control Systems: Lab 5 P, PI and PID ControllersMuhammad AbbasiNo ratings yet
- Lab 3Document6 pagesLab 3bassmalabaraaNo ratings yet
- N Adaptive PID Controller Based On Genetic Algorithm ProcessorDocument6 pagesN Adaptive PID Controller Based On Genetic Algorithm ProcessorEngr Nayyer Nayyab MalikNo ratings yet
- Signals and Systems - Project Notes - Autumn 2012Document37 pagesSignals and Systems - Project Notes - Autumn 2012Min Khine KyawNo ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Titration of Cu Complex Instructions 2019.01.21-1Document7 pagesTitration of Cu Complex Instructions 2019.01.21-1Muhammad AfzaalNo ratings yet
- Task6 LabViewDocument2 pagesTask6 LabViewMuhammad AfzaalNo ratings yet
- BE368 Lecture 3Document29 pagesBE368 Lecture 3Muhammad AfzaalNo ratings yet
- Workshop#4 KeyDocument2 pagesWorkshop#4 KeyMuhammad AfzaalNo ratings yet
- Workshop#3 KeyDocument2 pagesWorkshop#3 KeyMuhammad AfzaalNo ratings yet
- Workshop#6 KeyDocument2 pagesWorkshop#6 KeyMuhammad AfzaalNo ratings yet
- BE368 Lecture 4Document28 pagesBE368 Lecture 4Muhammad AfzaalNo ratings yet
- BE368 Lecture 5Document31 pagesBE368 Lecture 5Muhammad AfzaalNo ratings yet
- Amplitude Modulation - Lab1Document12 pagesAmplitude Modulation - Lab1Muhammad AfzaalNo ratings yet
- Assignment MatlabDocument4 pagesAssignment MatlabMuhammad AfzaalNo ratings yet
- Assign1 - RTESDocument4 pagesAssign1 - RTESMuhammad AfzaalNo ratings yet
- CS LabReport 5Document7 pagesCS LabReport 5Muhammad AfzaalNo ratings yet
- Analog Lab6Document6 pagesAnalog Lab6Muhammad AfzaalNo ratings yet
- CS LabReport 3Document10 pagesCS LabReport 3Muhammad AfzaalNo ratings yet
- CS LabReport 7Document10 pagesCS LabReport 7Muhammad AfzaalNo ratings yet
- CS LabReport 10Document10 pagesCS LabReport 10Muhammad AfzaalNo ratings yet
- CS LabReport 2Document8 pagesCS LabReport 2Muhammad AfzaalNo ratings yet
- CS LabReport 9Document13 pagesCS LabReport 9Muhammad AfzaalNo ratings yet
- CS LabReport 8Document10 pagesCS LabReport 8Muhammad AfzaalNo ratings yet
- CS LabReport 1Document9 pagesCS LabReport 1Muhammad AfzaalNo ratings yet
- APX Portable Accessory CatalogDocument12 pagesAPX Portable Accessory Catalogcraig_ochsNo ratings yet
- Seismic: VvinuDocument528 pagesSeismic: VvinuLucas ScartonNo ratings yet
- Ion ExchangeDocument12 pagesIon ExchangepruthvishNo ratings yet
- Alpha BasicDocument190 pagesAlpha Basicmiguel_pinheiro_10No ratings yet
- An Introduction To The Laplace Transformation-1949-JaegerDocument141 pagesAn Introduction To The Laplace Transformation-1949-JaegerDirect55No ratings yet
- NEC IDU IPASOLINK 400A Minimum ConfigurationDocument5 pagesNEC IDU IPASOLINK 400A Minimum ConfigurationNakul KulkarniNo ratings yet
- CIV E 354 Geotechnical Engineering Ii: by Giovanni CascanteDocument11 pagesCIV E 354 Geotechnical Engineering Ii: by Giovanni CascanteVNo ratings yet
- Measurement Sheet: S.N. Description NO. L. B. D/H. Qtty. 1 TotalDocument19 pagesMeasurement Sheet: S.N. Description NO. L. B. D/H. Qtty. 1 Totaldan12345_007No ratings yet
- PGN Case StudyDocument3 pagesPGN Case StudyFarizAgustyoNo ratings yet
- Property Options Pune - 5000 SF DSVDocument40 pagesProperty Options Pune - 5000 SF DSVjitesh vachhaniNo ratings yet
- Cross Compile Python For Embedded LinuxDocument3 pagesCross Compile Python For Embedded LinuxKuma Akira100% (1)
- ADBA First 2 UnitsDocument1 pageADBA First 2 Unitsyash mNo ratings yet
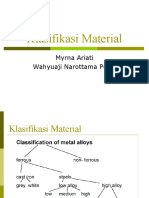
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocument49 pagesKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07No ratings yet
- Novatel Wireless External at CommandsDocument25 pagesNovatel Wireless External at CommandsPaulo A. Guevara PolaníaNo ratings yet
- Sealbond ETL-100 Tank Lining PDFDocument1 pageSealbond ETL-100 Tank Lining PDFJM SubionNo ratings yet
- High Voltage CablesDocument10 pagesHigh Voltage CableskhadijabugtiNo ratings yet
- Hzt. Ammar e Yaser (R.a.)Document88 pagesHzt. Ammar e Yaser (R.a.)naqvi202No ratings yet
- Stryker Adel 4700,512 Maternity Bed - Service ManualDocument153 pagesStryker Adel 4700,512 Maternity Bed - Service ManualVicTor MiKeNo ratings yet
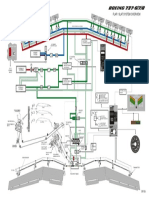
- B737NG - 27 50 A3 01 PDFDocument1 pageB737NG - 27 50 A3 01 PDFMuhammed MudassirNo ratings yet
- How To Use GX Developer MelsecDocument43 pagesHow To Use GX Developer MelsecAlexia VargasNo ratings yet
- Arson Invest 2Document100 pagesArson Invest 2Harrison sajorNo ratings yet
- 73K224BL V.22bis/V.22/V.21/Bell 212A/103 Single-Chip Modem W/ Integrated HybridDocument33 pages73K224BL V.22bis/V.22/V.21/Bell 212A/103 Single-Chip Modem W/ Integrated HybridNguyễn Văn TrungNo ratings yet
- SCAK200 - AK300 BookDocument28 pagesSCAK200 - AK300 BookStavre SorinNo ratings yet
- Gas TurbinesDocument31 pagesGas TurbinesShahril Anuar100% (2)
- Supplementary SpecificationDocument7 pagesSupplementary SpecificationFranklin PortilloNo ratings yet
- The Cut Off List of Allotment in Round 03 For Programme B.Tech (CET Code-131) For Academic Session 2023-24Document42 pagesThe Cut Off List of Allotment in Round 03 For Programme B.Tech (CET Code-131) For Academic Session 2023-24addisarbaNo ratings yet
- Mnit Admission LetterDocument1 pageMnit Admission LetterAjaj AlamNo ratings yet
- Graduate Program CoursesDocument11 pagesGraduate Program CoursesAhmed Adel IbrahimNo ratings yet