Download as pdf or txt
You might also like
- Mil DotsDocument1 pageMil Dotssjardell100% (2)
- HHT Alpha MethodDocument22 pagesHHT Alpha MethodSasi Sudhahar ChinnasamyNo ratings yet
- 14M B9J Electric Schematic - B9J1-1272Document34 pages14M B9J Electric Schematic - B9J1-1272Muhammad IbrahimNo ratings yet
- Final Report RSADocument27 pagesFinal Report RSAMounesh Panchal67% (3)
- Aldol Condensation ReactionDocument8 pagesAldol Condensation ReactionMohd Nakirudin Muhamad Nor100% (1)
- Cartesian Impedance Control of RedundantDocument6 pagesCartesian Impedance Control of Redundant이재봉No ratings yet
- Nonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential FlatnessDocument6 pagesNonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential Flatnessanon_93685582No ratings yet
- Mathematics 08 02063Document14 pagesMathematics 08 02063Sudipta MaityNo ratings yet
- Stabilization of Nonlinear SystemDocument7 pagesStabilization of Nonlinear SystemSaht Park Ulyshi AhaanNo ratings yet
- 2 Denis Mosconi - RevisadoDocument8 pages2 Denis Mosconi - RevisadoDenis MosconiNo ratings yet
- RoboticsDocument7 pagesRoboticsfggdgNo ratings yet
- Multibody Simulation: The Jacobian Matrix (A Tool For Analysis)Document19 pagesMultibody Simulation: The Jacobian Matrix (A Tool For Analysis)Anil KumarNo ratings yet
- Cartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsDocument6 pagesCartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsByron Xavier Lima CedilloNo ratings yet
- A Passivity-Based Adaptive Sliding Mode Position-Force Control For ManipulatorsDocument13 pagesA Passivity-Based Adaptive Sliding Mode Position-Force Control For ManipulatorsEmadNo ratings yet
- ### Dynamic-Identification-Of-Robots-With-Power-ModelDocument6 pages### Dynamic-Identification-Of-Robots-With-Power-Modelzhaodong.liangNo ratings yet
- Quantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsDocument9 pagesQuantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsJonas AraújoNo ratings yet
- Optimal Control of Buck Converter by State Feedback LinearizationDocument6 pagesOptimal Control of Buck Converter by State Feedback LinearizationShadNo ratings yet
- J JSV 2015 10 014Document13 pagesJ JSV 2015 10 014Partha SenguptaNo ratings yet
- EE200 Lec06Document14 pagesEE200 Lec06Priya GangwarNo ratings yet
- Pham Perder Eau Adorno Frais SeiDocument6 pagesPham Perder Eau Adorno Frais SeiEddy TixNo ratings yet
- Lecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of StabilityDocument10 pagesLecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of Stabilitytennis1949No ratings yet
- AllignéIAHR 2008 82Document10 pagesAllignéIAHR 2008 82Fabio FolpiniNo ratings yet
- uH#w:M3 EE XFD") ) H ZXVPJTL, IcSAXDNreJAXvE6dP2 FEDocument1 pageuH#w:M3 EE XFD") ) H ZXVPJTL, IcSAXDNreJAXvE6dP2 FEheaan.lasaiNo ratings yet
- Nonlinear System Identification With Prior Knowledge of The Region of AttractionDocument19 pagesNonlinear System Identification With Prior Knowledge of The Region of AttractionJessica JaraNo ratings yet
- Control of Nonholonomic Systems Using Reference Vector FieldsDocument6 pagesControl of Nonholonomic Systems Using Reference Vector FieldsSasi TejaNo ratings yet
- Forward An Inverse Kinematic of Some RobotsDocument6 pagesForward An Inverse Kinematic of Some RobotsVer TexNo ratings yet
- Algorithms: An Approach To The Dynamics and Control of Uncertain Robot ManipulatorsDocument11 pagesAlgorithms: An Approach To The Dynamics and Control of Uncertain Robot ManipulatorsVikNo ratings yet
- Mce371 13Document19 pagesMce371 13Abul HasnatNo ratings yet
- Admin, 7Document7 pagesAdmin, 7Long VũNo ratings yet
- MCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionDocument16 pagesMCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionChunyi WangNo ratings yet
- ControllabilityDocument3 pagesControllabilityMohsan AbbasNo ratings yet
- Recursive Backstepping Stabilization of A Wheeled Mobile RobotDocument8 pagesRecursive Backstepping Stabilization of A Wheeled Mobile RobotExequiel RemersaroNo ratings yet
- Robotics: Dynamic Model of ManipulatorsDocument20 pagesRobotics: Dynamic Model of ManipulatorsbalkyderNo ratings yet
- 2003 Garcia de Jalon Et AlDocument25 pages2003 Garcia de Jalon Et Alد.م. محمد الطاهرNo ratings yet
- Calculation of Lyapunov Exponents in Time-Delayed SystemsDocument8 pagesCalculation of Lyapunov Exponents in Time-Delayed Systemscsernak2No ratings yet
- Acta Technica Napocensis: Evaluation of The Level of Performance For The Vibrating Screens Based On Dynamic ParametersDocument6 pagesActa Technica Napocensis: Evaluation of The Level of Performance For The Vibrating Screens Based On Dynamic ParametersNitu MarilenaNo ratings yet
- InTech-Cartesian Control For Robot ManipulatorsDocument50 pagesInTech-Cartesian Control For Robot ManipulatorsMahesh Kumar RathinamNo ratings yet
- Linear Algebra and Robot Modeling: 1 Basic Kinematic EquationsDocument9 pagesLinear Algebra and Robot Modeling: 1 Basic Kinematic EquationsAbdur HamzahNo ratings yet
- Feedback Linearizing ControlDocument59 pagesFeedback Linearizing ControlLê Quốc ViệtNo ratings yet
- A New Bifurcation Analysis For Power System Dynamic Voltage Stability StudiesDocument6 pagesA New Bifurcation Analysis For Power System Dynamic Voltage Stability StudiesRathinaKumarNo ratings yet
- Model-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsDocument13 pagesModel-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsWong Chiong LiongNo ratings yet
- Spectral Analysis of Nonlinear Ows: Clarencew - Rowley, Shervinbagheri, Philippschlatter Dans - HenningsonDocument13 pagesSpectral Analysis of Nonlinear Ows: Clarencew - Rowley, Shervinbagheri, Philippschlatter Dans - HenningsonmapachorraNo ratings yet
- The Influence of The Lorenz System Fractionality oDocument5 pagesThe Influence of The Lorenz System Fractionality oJulexy AntonellaNo ratings yet
- Isma2010 0598Document12 pagesIsma2010 0598Adnan RasheedNo ratings yet
- Novo MetodoDocument25 pagesNovo MetodoAtaíde NetoNo ratings yet
- Chương 05Document75 pagesChương 05Nguyễn TrườngNo ratings yet
- D N - L B I S A S - R C: Department of Civil Engineering, PUC-Rio Rio de Janeiro, RJ, Brazil - 22453-900Document6 pagesD N - L B I S A S - R C: Department of Civil Engineering, PUC-Rio Rio de Janeiro, RJ, Brazil - 22453-900Mazen Al-arsanNo ratings yet
- Lyapunov ArticleDocument15 pagesLyapunov ArticleValeria Montserrat Maya GonzalezNo ratings yet
- A New Solution For Inverse Kinematics of Manipulator Based On NeDocument3 pagesA New Solution For Inverse Kinematics of Manipulator Based On NeDilek METİNNo ratings yet
- EE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004Document6 pagesEE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004bcooper477No ratings yet
- 2003 Robotica03Document12 pages2003 Robotica03Raj KanoriaNo ratings yet
- On Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableDocument6 pagesOn Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableaimalNo ratings yet
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- Paper 31Document6 pagesPaper 31Daniel G Canton PuertoNo ratings yet
- Transverse Linearization For Mechanical Systems With Several Passive Degrees of Freedom With Applications To Orbital StabilizationDocument6 pagesTransverse Linearization For Mechanical Systems With Several Passive Degrees of Freedom With Applications To Orbital StabilizationViktor SokolovNo ratings yet
- (X (Jo) P (Jo) ) : Tiplication PropertyDocument25 pages(X (Jo) P (Jo) ) : Tiplication PropertyDeepthi PNo ratings yet
- Nonlinear and Adaptive Control: An Abbreviated Status ReportDocument15 pagesNonlinear and Adaptive Control: An Abbreviated Status ReportOwais KhanNo ratings yet
- 2002 Papachristodoulou PrajnaDocument6 pages2002 Papachristodoulou PrajnaJéssica Cunha PinheiroNo ratings yet
- Generalized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemDocument4 pagesGeneralized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemsumathyNo ratings yet
- Ajassp 2012 851 857Document7 pagesAjassp 2012 851 857MongiBESBESNo ratings yet
- Mathematical PreliminariesDocument14 pagesMathematical PreliminariesSanchez Resendiz BonifacioNo ratings yet
- Mce647 11 HandDocument17 pagesMce647 11 HandAbdelaziz IderNo ratings yet
- FORM ReliabilityDocument2 pagesFORM ReliabilityLukusa BadimuenaNo ratings yet
- Metric: Hex Nut Style 2 Class 12Document1 pageMetric: Hex Nut Style 2 Class 12Ankit LonareNo ratings yet
- Magnesium Sterate Mixing in V BlenderDocument12 pagesMagnesium Sterate Mixing in V Blendermaneshdixit4312No ratings yet
- 3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersDocument2 pages3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersG_RanjithNo ratings yet
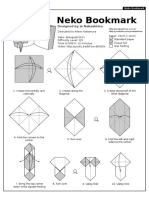
- Neko Bookmark: Designed by Jo NakashimaDocument4 pagesNeko Bookmark: Designed by Jo NakashimaEzra BlatzNo ratings yet
- ClockGating CtsDocument8 pagesClockGating CtsSrikanth Reddy SarabudlaNo ratings yet
- Haemoglobin: DR Nilesh Kate MBBS, MD Associate ProfDocument31 pagesHaemoglobin: DR Nilesh Kate MBBS, MD Associate ProfMarcellia100% (2)
- Bicenter Running ParametersDocument4 pagesBicenter Running ParametersJonathanNo ratings yet
- Basics of Motor Starters and ContactorsDocument37 pagesBasics of Motor Starters and ContactorsTrifonas Krommidas100% (1)
- ALM 12 Benchmark Testing Tool DocumentationDocument22 pagesALM 12 Benchmark Testing Tool DocumentationjosephNo ratings yet
- Maintenance of Power TransformerDocument18 pagesMaintenance of Power TransformerMohammed Jaffar Adnan100% (1)
- Lotus Temple MagazineDocument34 pagesLotus Temple MagazineDivyata DhakalNo ratings yet
- Qualitative Research in Management Addresing Complexity Context and PersonaDocument13 pagesQualitative Research in Management Addresing Complexity Context and Personaalbadr20205026No ratings yet
- Butt Kicker Concert User GuideDocument8 pagesButt Kicker Concert User GuideJorge Balladares PesantesNo ratings yet
- KEW4105 ManualDocument19 pagesKEW4105 ManualYasuko Maulina ShigenoNo ratings yet
- PJC H2 PHY 9646 Mid-Year Paper 2012Document22 pagesPJC H2 PHY 9646 Mid-Year Paper 2012Ng Jia ChengNo ratings yet
- MOXA Tech Note - Using Wonderwares InTouch With IoLogik 4000 ServersDocument15 pagesMOXA Tech Note - Using Wonderwares InTouch With IoLogik 4000 ServersEko Tri WasistoNo ratings yet
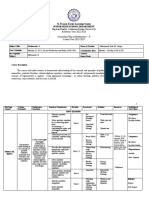
- Mathematics 9 Curriculum MapDocument7 pagesMathematics 9 Curriculum MapMohammad Saide LangcoNo ratings yet
- Hora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaDocument19 pagesHora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaUtpal KumarNo ratings yet
- Chemistry Lecturer Short Notes & MCQs PDFDocument24 pagesChemistry Lecturer Short Notes & MCQs PDFPolitical CornerNo ratings yet
- Lecture 05 Electric FluxDocument52 pagesLecture 05 Electric FluxNova PiattosNo ratings yet
- Ebook Theory of Statistical Inference 1St Edition Anthony Almudevar Online PDF All ChapterDocument69 pagesEbook Theory of Statistical Inference 1St Edition Anthony Almudevar Online PDF All Chapteredfnmaudif955100% (5)
- Es Model ExamDocument3 pagesEs Model ExamAarun ArasanNo ratings yet
- L2 - Angle and Bearing Measurement PDFDocument32 pagesL2 - Angle and Bearing Measurement PDFsyahir imanNo ratings yet
- Linear SeperabilityDocument11 pagesLinear SeperabilityNetaji GandiNo ratings yet
- An Assessment of HF Nvis Radio System Reliability: Dean SumićDocument10 pagesAn Assessment of HF Nvis Radio System Reliability: Dean Sumićdot16eNo ratings yet