
Applied Mechanics - CLC
Applied Mechanics - CLC
You might also like
- 1 4 55 59 KW MPI EngineDocument138 pages1 4 55 59 KW MPI Engine19crysti50% (2)
- Polaris 380 Repair ManualDocument46 pagesPolaris 380 Repair ManualPool Supply Sales100% (5)
- CE Board Nov 2020 Engineering Mechanics Set 1Document3 pagesCE Board Nov 2020 Engineering Mechanics Set 1Eugenio Genesis AbadNo ratings yet
- Moonraker 6 CB Antenna User ManualDocument15 pagesMoonraker 6 CB Antenna User Manualcb27100% (6)
- Mathematical Modeling, Simulation and Validation of A Boiler Drum: Some InvestigationsDocument33 pagesMathematical Modeling, Simulation and Validation of A Boiler Drum: Some InvestigationsMohammadreza NaghaviNo ratings yet
- Unit I Engineering Mechanics - StaticsDocument17 pagesUnit I Engineering Mechanics - Staticsbpal1970No ratings yet
- Statics Week 1 - 2019Document11 pagesStatics Week 1 - 2019Qazi Muhammed FayyazNo ratings yet
- CHP 4-Law of MotionDocument6 pagesCHP 4-Law of MotionneenuvarkeyNo ratings yet
- محاضرة 1Document3 pagesمحاضرة 1Karrar Al-khalidyNo ratings yet
- Engg - Mechanics 2nd SemDocument97 pagesEngg - Mechanics 2nd Semmannatdhibar7No ratings yet
- Statics 101Document4 pagesStatics 101Justine Ejay MoscosaNo ratings yet
- EM Chapter 1Document15 pagesEM Chapter 1Mahesh BahadareNo ratings yet
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- Chapter8 Conservation of EnergyDocument6 pagesChapter8 Conservation of Energybm7gyygjtfNo ratings yet
- Lecture 5 - FBDsDocument24 pagesLecture 5 - FBDsjunedrkaziNo ratings yet
- Bodies or Fluids That Are at Rest or in Motions.: DynamicsDocument23 pagesBodies or Fluids That Are at Rest or in Motions.: DynamicsJames MichaelNo ratings yet
- ME 211 Unit 2 - A Study Guide On Introduction To Engineering Thermodynamics 1Document7 pagesME 211 Unit 2 - A Study Guide On Introduction To Engineering Thermodynamics 1Althea Iris DanoNo ratings yet
- Engg-Mechanics IntroductionDocument79 pagesEngg-Mechanics IntroductionDr. Pankaj KumarNo ratings yet
- Theories of Stress and StrainDocument50 pagesTheories of Stress and StrainLutful Hasan SayedNo ratings yet
- Lesson 05.0Document7 pagesLesson 05.0Patrick Jamiel TorresNo ratings yet
- Module 1 - MechanicsDocument31 pagesModule 1 - MechanicsAsha AsokNo ratings yet
- Introduction To Engineering MechanicsDocument16 pagesIntroduction To Engineering MechanicsKirshna JolaniaNo ratings yet
- Engineering MechanicsDocument169 pagesEngineering MechanicsRADHA KRISHNAN T93% (15)
- EM Unit Wise PDFDocument32 pagesEM Unit Wise PDFRamuVasaNo ratings yet
- Conten T: Unit I:En Neerin Mechanics.......................................................................Document38 pagesConten T: Unit I:En Neerin Mechanics.......................................................................Mir Mustafa AliNo ratings yet
- Definitions and Questions Paper 1Document47 pagesDefinitions and Questions Paper 1ThabeloNo ratings yet
- Laws of Motion-1Document4 pagesLaws of Motion-1prachi98601No ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- Unit-1 FMEDocument59 pagesUnit-1 FMEAshish KhariNo ratings yet
- Lectures 1a and 1bDocument56 pagesLectures 1a and 1bJOY MOFORNo ratings yet
- Introduction - Forces, Equilibrium: Chapter HighlightsDocument87 pagesIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNo ratings yet
- Newton's Laws of MotionsDocument11 pagesNewton's Laws of MotionsMarianne Kristelle FactorNo ratings yet
- Theoryofstructures Ib 180903021950Document36 pagesTheoryofstructures Ib 180903021950Lance NabongNo ratings yet
- Chapter One Scalar and VectorsDocument9 pagesChapter One Scalar and VectorsHenok GirmaNo ratings yet
- Engineering Mechanics - Lecture Note 1Document33 pagesEngineering Mechanics - Lecture Note 1Tanu RdNo ratings yet
- Usaha Dan EnergiDocument27 pagesUsaha Dan Energiriyantrin_552787272No ratings yet
- Final ReportDocument44 pagesFinal ReportDuc Hieu PhamNo ratings yet
- EEE - 2105 - L1 To 3 - UploadDocument78 pagesEEE - 2105 - L1 To 3 - UploadKISAKYE MOSESNo ratings yet
- Applied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreDocument82 pagesApplied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreUmer RazaqNo ratings yet
- Unit 4 - BCEM (Mechanics)Document29 pagesUnit 4 - BCEM (Mechanics)SHASHI RANJANNo ratings yet
- Numerical SDocument82 pagesNumerical Smuhammad adilNo ratings yet
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Module of Analytic MechanicsDocument32 pagesModule of Analytic MechanicsMirza MueidNo ratings yet
- Engineering Mechanics PDFDocument78 pagesEngineering Mechanics PDFSanthosh Mahesh100% (1)
- CHAPTER 12 - Kinetics of Particles Newton's Second LawDocument43 pagesCHAPTER 12 - Kinetics of Particles Newton's Second Lawsirajulislam921354No ratings yet
- Em Ut1Document30 pagesEm Ut1david josephNo ratings yet
- نموذج1Document11 pagesنموذج1kikk59967No ratings yet
- Slide Set-1: 1. What Is Mechanics 2. Fundamental PrinciplesDocument11 pagesSlide Set-1: 1. What Is Mechanics 2. Fundamental PrinciplesgangasfNo ratings yet
- CHE213 - Lecture Notes PDFDocument10 pagesCHE213 - Lecture Notes PDFMargaret FloresNo ratings yet
- Unit-1 10Document19 pagesUnit-1 10Murugesh RNo ratings yet
- EM - Lecture Notes - Module-1Document41 pagesEM - Lecture Notes - Module-1elinNo ratings yet
- 1 Null-1Document59 pages1 Null-1faizankhantangi0908No ratings yet
- Chapter 2 - Newtons LawsDocument24 pagesChapter 2 - Newtons LawsKenny Jay LabianoNo ratings yet
- Lecture 1 EE1MECDocument43 pagesLecture 1 EE1MECsalemalbulushi123No ratings yet
- Civil Engg. MechanicsDocument125 pagesCivil Engg. MechanicsSunish GuptaNo ratings yet
- Week 5 Work Energy PowerDocument68 pagesWeek 5 Work Energy PowerShare linkNo ratings yet
- Module-29A: Energy MethodsDocument2 pagesModule-29A: Energy MethodsjhacademyhydNo ratings yet
- CCC Yenching College CKNGDocument12 pagesCCC Yenching College CKNGEmily LukNo ratings yet
- Lecture Slides 1-2Document30 pagesLecture Slides 1-2themarvelbeastNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Unified Field Theory in a Nutshell1: The Quest for the Theory of EverythingFrom EverandUnified Field Theory in a Nutshell1: The Quest for the Theory of EverythingNo ratings yet
- Linear TransformationDocument48 pagesLinear TransformationDuyên NguyễnNo ratings yet
- 13 MagneticResonanceImagingDocument46 pages13 MagneticResonanceImagingDuyên NguyễnNo ratings yet
- AntibioticsDocument36 pagesAntibioticsDuyên NguyễnNo ratings yet
- CƠ LƯU CHẤTDocument7 pagesCƠ LƯU CHẤTDuyên NguyễnNo ratings yet
- Digital X-Ray ImagingDocument4 pagesDigital X-Ray ImagingDuyên NguyễnNo ratings yet
- Increase All of The Following Except:: Fluoroscopy - MammographyDocument4 pagesIncrease All of The Following Except:: Fluoroscopy - MammographyDuyên NguyễnNo ratings yet
- 2 - Interaction of Radiation and MatterDocument27 pages2 - Interaction of Radiation and MatterDuyên NguyễnNo ratings yet
- Katalog LincolnaDocument612 pagesKatalog LincolnaHaris TrešnjoNo ratings yet
- BHEL Mechanical Engineering Sample Question Papers With AnswersDocument4 pagesBHEL Mechanical Engineering Sample Question Papers With AnswersRobin SinghNo ratings yet
- Library BooksDocument3 pagesLibrary BooksSunil Yadav33% (3)
- Lto AO No Acl 2009-018Document10 pagesLto AO No Acl 2009-018Anonymous lYBiiLh75% (4)
- Optimization of Screw Compressor Design: SynopsisDocument11 pagesOptimization of Screw Compressor Design: SynopsisDustyn Deakins100% (1)
- 405f 1Document8 pages405f 1api-198321430% (1)
- MP803FCT-2W: Fan Coil Unit On/Off Digital ThermostatDocument1 pageMP803FCT-2W: Fan Coil Unit On/Off Digital ThermostatChhomNo ratings yet
- Esab, OK Flux 10.71 (30.06.16), 420014-En - US-FactSheet - Main-01Document2 pagesEsab, OK Flux 10.71 (30.06.16), 420014-En - US-FactSheet - Main-01RodrigoNo ratings yet
- Arun BLS4Document2 pagesArun BLS4Eric E' Sandoval ANo ratings yet
- 4sf32els 4sf40els, 4sf45els 4sf50els 4SF30GS1 4SF35GS1, 4SF40GS1 4SF45GS1, 4SF50GS1Document4 pages4sf32els 4sf40els, 4sf45els 4sf50els 4SF30GS1 4SF35GS1, 4SF40GS1 4SF45GS1, 4SF50GS1ab5951No ratings yet
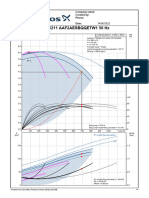
- Grundfosliterature 1191206Document80 pagesGrundfosliterature 1191206Chancedaniels EmunaNo ratings yet
- Monthly Hist Parts Bulletins Autocar April 2006 632998017482343750Document3 pagesMonthly Hist Parts Bulletins Autocar April 2006 632998017482343750Andres CruzNo ratings yet
- Spare Parts List: Hydraulic CompactorDocument12 pagesSpare Parts List: Hydraulic CompactorLuis HernandezNo ratings yet
- Welding Cast IronDocument10 pagesWelding Cast IronRoberto CordovaNo ratings yet
- Lpg-Tank Wagon CodeDocument30 pagesLpg-Tank Wagon Codejoefrizal100% (1)
- Dr. Mohamed Ismail PDFDocument3 pagesDr. Mohamed Ismail PDFKhadar YousufNo ratings yet
- Overspeed Turbine APIDocument3 pagesOverspeed Turbine APIyogacruiseNo ratings yet
- Control Valves Series "Q" DN15 - DN100: Installation and Maintenace InstructionsDocument24 pagesControl Valves Series "Q" DN15 - DN100: Installation and Maintenace InstructionsThomas LeonardoNo ratings yet
- BertoR Brochure21x21 PREVIEW PDFDocument2 pagesBertoR Brochure21x21 PREVIEW PDFfahmulhidayatNo ratings yet
- Steel Quiz: Manual (Document2 pagesSteel Quiz: Manual (Seismotec EngineersNo ratings yet
- GPV BuderusDocument4 pagesGPV Buderusing.ettoreNo ratings yet
- Air Cooled Chillers: Direct ExpansionDocument27 pagesAir Cooled Chillers: Direct ExpansionIstvan MadacsyNo ratings yet
- Complete Report On HvacDocument57 pagesComplete Report On HvacJunaid Khan100% (2)
- Rim Clamp Tire Changer Maintenance TipsDocument7 pagesRim Clamp Tire Changer Maintenance Tipsdionisio emilio reyes jimenezNo ratings yet
- Aircraft Winglets 2 PDFDocument26 pagesAircraft Winglets 2 PDFAlen S T100% (1)
- A Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentDocument17 pagesA Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentBHAVESH JOSHINo ratings yet





























































































Download as pdf or txt
You might also like
- 1 4 55 59 KW MPI EngineDocument138 pages1 4 55 59 KW MPI Engine19crysti50% (2)
- Polaris 380 Repair ManualDocument46 pagesPolaris 380 Repair ManualPool Supply Sales100% (5)
- CE Board Nov 2020 Engineering Mechanics Set 1Document3 pagesCE Board Nov 2020 Engineering Mechanics Set 1Eugenio Genesis AbadNo ratings yet
- Moonraker 6 CB Antenna User ManualDocument15 pagesMoonraker 6 CB Antenna User Manualcb27100% (6)
- Mathematical Modeling, Simulation and Validation of A Boiler Drum: Some InvestigationsDocument33 pagesMathematical Modeling, Simulation and Validation of A Boiler Drum: Some InvestigationsMohammadreza NaghaviNo ratings yet
- Unit I Engineering Mechanics - StaticsDocument17 pagesUnit I Engineering Mechanics - Staticsbpal1970No ratings yet
- Statics Week 1 - 2019Document11 pagesStatics Week 1 - 2019Qazi Muhammed FayyazNo ratings yet
- CHP 4-Law of MotionDocument6 pagesCHP 4-Law of MotionneenuvarkeyNo ratings yet
- محاضرة 1Document3 pagesمحاضرة 1Karrar Al-khalidyNo ratings yet
- Engg - Mechanics 2nd SemDocument97 pagesEngg - Mechanics 2nd Semmannatdhibar7No ratings yet
- Statics 101Document4 pagesStatics 101Justine Ejay MoscosaNo ratings yet
- EM Chapter 1Document15 pagesEM Chapter 1Mahesh BahadareNo ratings yet
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- Chapter8 Conservation of EnergyDocument6 pagesChapter8 Conservation of Energybm7gyygjtfNo ratings yet
- Lecture 5 - FBDsDocument24 pagesLecture 5 - FBDsjunedrkaziNo ratings yet
- Bodies or Fluids That Are at Rest or in Motions.: DynamicsDocument23 pagesBodies or Fluids That Are at Rest or in Motions.: DynamicsJames MichaelNo ratings yet
- ME 211 Unit 2 - A Study Guide On Introduction To Engineering Thermodynamics 1Document7 pagesME 211 Unit 2 - A Study Guide On Introduction To Engineering Thermodynamics 1Althea Iris DanoNo ratings yet
- Engg-Mechanics IntroductionDocument79 pagesEngg-Mechanics IntroductionDr. Pankaj KumarNo ratings yet
- Theories of Stress and StrainDocument50 pagesTheories of Stress and StrainLutful Hasan SayedNo ratings yet
- Lesson 05.0Document7 pagesLesson 05.0Patrick Jamiel TorresNo ratings yet
- Module 1 - MechanicsDocument31 pagesModule 1 - MechanicsAsha AsokNo ratings yet
- Introduction To Engineering MechanicsDocument16 pagesIntroduction To Engineering MechanicsKirshna JolaniaNo ratings yet
- Engineering MechanicsDocument169 pagesEngineering MechanicsRADHA KRISHNAN T93% (15)
- EM Unit Wise PDFDocument32 pagesEM Unit Wise PDFRamuVasaNo ratings yet
- Conten T: Unit I:En Neerin Mechanics.......................................................................Document38 pagesConten T: Unit I:En Neerin Mechanics.......................................................................Mir Mustafa AliNo ratings yet
- Definitions and Questions Paper 1Document47 pagesDefinitions and Questions Paper 1ThabeloNo ratings yet
- Laws of Motion-1Document4 pagesLaws of Motion-1prachi98601No ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- Unit-1 FMEDocument59 pagesUnit-1 FMEAshish KhariNo ratings yet
- Lectures 1a and 1bDocument56 pagesLectures 1a and 1bJOY MOFORNo ratings yet
- Introduction - Forces, Equilibrium: Chapter HighlightsDocument87 pagesIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNo ratings yet
- Newton's Laws of MotionsDocument11 pagesNewton's Laws of MotionsMarianne Kristelle FactorNo ratings yet
- Theoryofstructures Ib 180903021950Document36 pagesTheoryofstructures Ib 180903021950Lance NabongNo ratings yet
- Chapter One Scalar and VectorsDocument9 pagesChapter One Scalar and VectorsHenok GirmaNo ratings yet
- Engineering Mechanics - Lecture Note 1Document33 pagesEngineering Mechanics - Lecture Note 1Tanu RdNo ratings yet
- Usaha Dan EnergiDocument27 pagesUsaha Dan Energiriyantrin_552787272No ratings yet
- Final ReportDocument44 pagesFinal ReportDuc Hieu PhamNo ratings yet
- EEE - 2105 - L1 To 3 - UploadDocument78 pagesEEE - 2105 - L1 To 3 - UploadKISAKYE MOSESNo ratings yet
- Applied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreDocument82 pagesApplied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreUmer RazaqNo ratings yet
- Unit 4 - BCEM (Mechanics)Document29 pagesUnit 4 - BCEM (Mechanics)SHASHI RANJANNo ratings yet
- Numerical SDocument82 pagesNumerical Smuhammad adilNo ratings yet
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Module of Analytic MechanicsDocument32 pagesModule of Analytic MechanicsMirza MueidNo ratings yet
- Engineering Mechanics PDFDocument78 pagesEngineering Mechanics PDFSanthosh Mahesh100% (1)
- CHAPTER 12 - Kinetics of Particles Newton's Second LawDocument43 pagesCHAPTER 12 - Kinetics of Particles Newton's Second Lawsirajulislam921354No ratings yet
- Em Ut1Document30 pagesEm Ut1david josephNo ratings yet
- نموذج1Document11 pagesنموذج1kikk59967No ratings yet
- Slide Set-1: 1. What Is Mechanics 2. Fundamental PrinciplesDocument11 pagesSlide Set-1: 1. What Is Mechanics 2. Fundamental PrinciplesgangasfNo ratings yet
- CHE213 - Lecture Notes PDFDocument10 pagesCHE213 - Lecture Notes PDFMargaret FloresNo ratings yet
- Unit-1 10Document19 pagesUnit-1 10Murugesh RNo ratings yet
- EM - Lecture Notes - Module-1Document41 pagesEM - Lecture Notes - Module-1elinNo ratings yet
- 1 Null-1Document59 pages1 Null-1faizankhantangi0908No ratings yet
- Chapter 2 - Newtons LawsDocument24 pagesChapter 2 - Newtons LawsKenny Jay LabianoNo ratings yet
- Lecture 1 EE1MECDocument43 pagesLecture 1 EE1MECsalemalbulushi123No ratings yet
- Civil Engg. MechanicsDocument125 pagesCivil Engg. MechanicsSunish GuptaNo ratings yet
- Week 5 Work Energy PowerDocument68 pagesWeek 5 Work Energy PowerShare linkNo ratings yet
- Module-29A: Energy MethodsDocument2 pagesModule-29A: Energy MethodsjhacademyhydNo ratings yet
- CCC Yenching College CKNGDocument12 pagesCCC Yenching College CKNGEmily LukNo ratings yet
- Lecture Slides 1-2Document30 pagesLecture Slides 1-2themarvelbeastNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Unified Field Theory in a Nutshell1: The Quest for the Theory of EverythingFrom EverandUnified Field Theory in a Nutshell1: The Quest for the Theory of EverythingNo ratings yet
- Linear TransformationDocument48 pagesLinear TransformationDuyên NguyễnNo ratings yet
- 13 MagneticResonanceImagingDocument46 pages13 MagneticResonanceImagingDuyên NguyễnNo ratings yet
- AntibioticsDocument36 pagesAntibioticsDuyên NguyễnNo ratings yet
- CƠ LƯU CHẤTDocument7 pagesCƠ LƯU CHẤTDuyên NguyễnNo ratings yet
- Digital X-Ray ImagingDocument4 pagesDigital X-Ray ImagingDuyên NguyễnNo ratings yet
- Increase All of The Following Except:: Fluoroscopy - MammographyDocument4 pagesIncrease All of The Following Except:: Fluoroscopy - MammographyDuyên NguyễnNo ratings yet
- 2 - Interaction of Radiation and MatterDocument27 pages2 - Interaction of Radiation and MatterDuyên NguyễnNo ratings yet
- Katalog LincolnaDocument612 pagesKatalog LincolnaHaris TrešnjoNo ratings yet
- BHEL Mechanical Engineering Sample Question Papers With AnswersDocument4 pagesBHEL Mechanical Engineering Sample Question Papers With AnswersRobin SinghNo ratings yet
- Library BooksDocument3 pagesLibrary BooksSunil Yadav33% (3)
- Lto AO No Acl 2009-018Document10 pagesLto AO No Acl 2009-018Anonymous lYBiiLh75% (4)
- Optimization of Screw Compressor Design: SynopsisDocument11 pagesOptimization of Screw Compressor Design: SynopsisDustyn Deakins100% (1)
- 405f 1Document8 pages405f 1api-198321430% (1)
- MP803FCT-2W: Fan Coil Unit On/Off Digital ThermostatDocument1 pageMP803FCT-2W: Fan Coil Unit On/Off Digital ThermostatChhomNo ratings yet
- Esab, OK Flux 10.71 (30.06.16), 420014-En - US-FactSheet - Main-01Document2 pagesEsab, OK Flux 10.71 (30.06.16), 420014-En - US-FactSheet - Main-01RodrigoNo ratings yet
- Arun BLS4Document2 pagesArun BLS4Eric E' Sandoval ANo ratings yet
- 4sf32els 4sf40els, 4sf45els 4sf50els 4SF30GS1 4SF35GS1, 4SF40GS1 4SF45GS1, 4SF50GS1Document4 pages4sf32els 4sf40els, 4sf45els 4sf50els 4SF30GS1 4SF35GS1, 4SF40GS1 4SF45GS1, 4SF50GS1ab5951No ratings yet
- Grundfosliterature 1191206Document80 pagesGrundfosliterature 1191206Chancedaniels EmunaNo ratings yet
- Monthly Hist Parts Bulletins Autocar April 2006 632998017482343750Document3 pagesMonthly Hist Parts Bulletins Autocar April 2006 632998017482343750Andres CruzNo ratings yet
- Spare Parts List: Hydraulic CompactorDocument12 pagesSpare Parts List: Hydraulic CompactorLuis HernandezNo ratings yet
- Welding Cast IronDocument10 pagesWelding Cast IronRoberto CordovaNo ratings yet
- Lpg-Tank Wagon CodeDocument30 pagesLpg-Tank Wagon Codejoefrizal100% (1)
- Dr. Mohamed Ismail PDFDocument3 pagesDr. Mohamed Ismail PDFKhadar YousufNo ratings yet
- Overspeed Turbine APIDocument3 pagesOverspeed Turbine APIyogacruiseNo ratings yet
- Control Valves Series "Q" DN15 - DN100: Installation and Maintenace InstructionsDocument24 pagesControl Valves Series "Q" DN15 - DN100: Installation and Maintenace InstructionsThomas LeonardoNo ratings yet
- BertoR Brochure21x21 PREVIEW PDFDocument2 pagesBertoR Brochure21x21 PREVIEW PDFfahmulhidayatNo ratings yet
- Steel Quiz: Manual (Document2 pagesSteel Quiz: Manual (Seismotec EngineersNo ratings yet
- GPV BuderusDocument4 pagesGPV Buderusing.ettoreNo ratings yet
- Air Cooled Chillers: Direct ExpansionDocument27 pagesAir Cooled Chillers: Direct ExpansionIstvan MadacsyNo ratings yet
- Complete Report On HvacDocument57 pagesComplete Report On HvacJunaid Khan100% (2)
- Rim Clamp Tire Changer Maintenance TipsDocument7 pagesRim Clamp Tire Changer Maintenance Tipsdionisio emilio reyes jimenezNo ratings yet
- Aircraft Winglets 2 PDFDocument26 pagesAircraft Winglets 2 PDFAlen S T100% (1)
- A Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentDocument17 pagesA Self - Learning Guide For The Design Engineer To Build Competency in Product Design and DevelopmentBHAVESH JOSHINo ratings yet